- The paper introduces a confidence-driven refinement framework that integrates coarse CityGML models with high-resolution MLS point clouds to update facade geometry.
- It employs a four-stage pipeline—combining RANSAC-based matching, candidate face generation, sequential confidence scoring, and binary optimization—to correct facade misalignments.
- Experimental results demonstrate significant reductions in RMSE and centroid offsets while ensuring fully watertight and manifold outputs for digital twins.
Confidence-Driven Facade Refinement of 3D Building Models Using MLS Point Clouds
Introduction
This paper presents an automated geometric refinement framework targeting facade accuracy in 3D building models by integrating coarse CityGML LOD2 datasets (primarily derived from Airborne Laser Scanning) with high-resolution Mobile Laser Scanning (MLS) point clouds. The methodology prioritizes the preservation and targeted updating of existing topology, where the coarse mesh acts as a geometric prior. Instead of fully reconstructing building geometry, the framework corrects specific outdated or inaccurate facades with minimal computational overhead. Results on large-scale urban datasets substantiate significant improvements in geometric alignment and topological integrity, supporting practical deployment in the maintenance of digital twins and high-precision urban modeling.
Problem Statement and Motivation
Coarse CityGML building models, largely generated via ALS or photogrammetry, display substantial geometric deficiencies in facades due to nadir sensor limitations and occlusions. Full-model multi-source fusion or reconstruction-from-scratch is generally impractical in dynamic urban environments due to high computational costs, temporal inconsistencies, and strict coverage requirements. Reconstruction techniques based on geometric primitives, data-driven learning, and mesh repair either suffer from over-smoothing, high sensitivity to incomplete data, or lack the ability to ingest new sensory measurements. Current mesh refinement methods provide limited support for geometric updating from new data while guaranteeing watertightness and manifoldness.
Methodology
The proposed framework introduces a four-stage automated workflow:
- Model-to-Surface Matching: Initial alignment involves RANSAC-based plane extraction from the MLS point cloud followed by coarse spatial filtering and fine-grained geometric matching based on normal vectors, centroid-to-plane distances, and oriented bounding box (OBB) intersection-over-union. A composite matching score, integrating weighted measures of normal similarity and bounding spatial coverage, determines optimal facade correspondences, while model-level quality assessment automates the selection process for multiple overlapping candidate models.
- Global Candidate Face Generation: Utilizing both the matched MLS planes and preserved geometry from the coarse model, an augmented candidate set is generated. Planar primitives with minor angular deviations are merged to mitigate degenerate geometry, and intersected to produce faces bounded by the expanded 3D OBB, restricting search space to regions requiring refinement.
- Confidence Computation: For each candidate face, a sequential filtering process quantifies geometric alignment using four metrics—angle filtering, distance filtering, bounding box overlap, and 2D area projection overlap—culminating in a robust confidence score reflecting reference-candidate agreement. Only the maximal support value from multiple matches is preserved per candidate, enforcing reliability and mitigating spurious surface support.
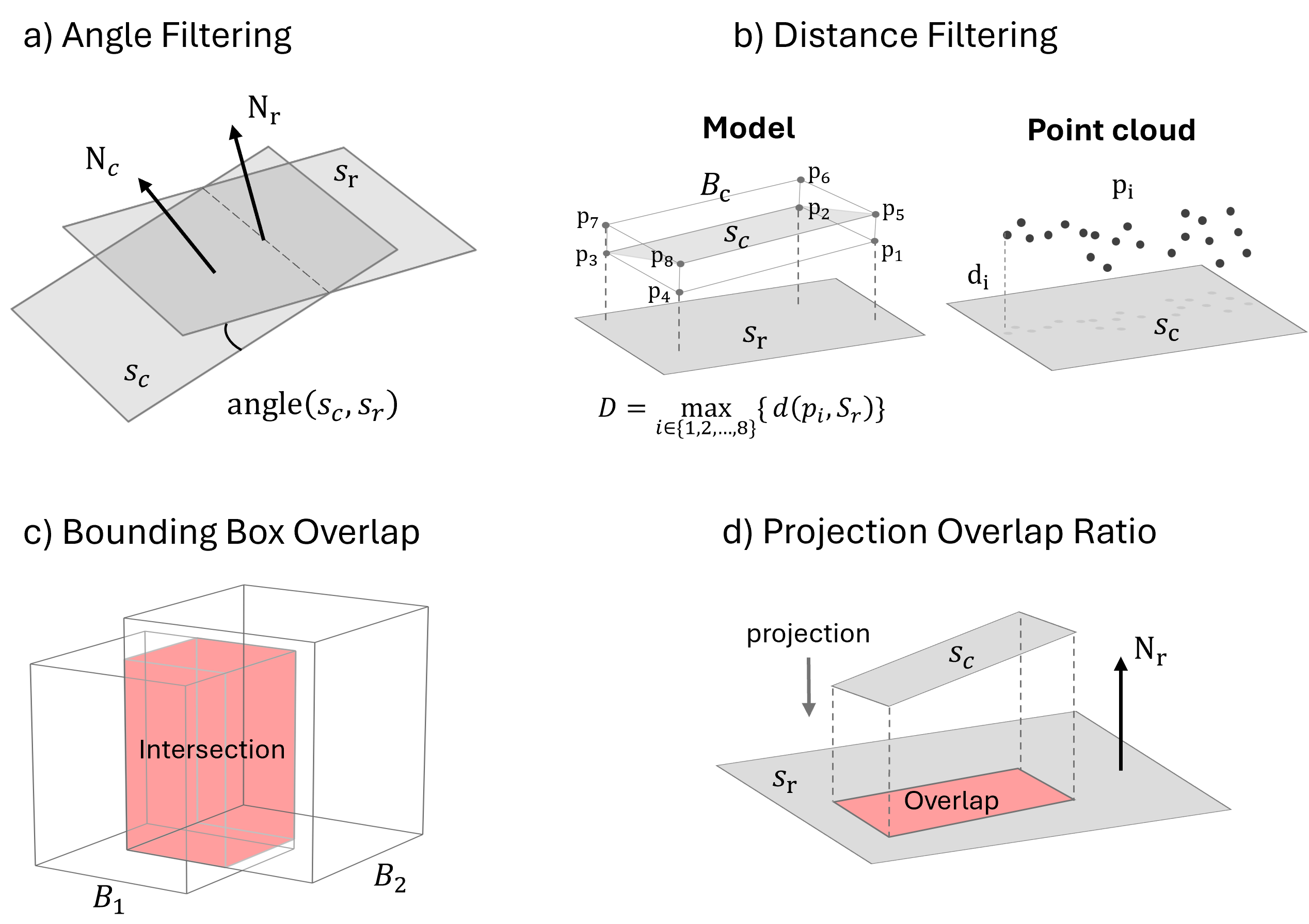
Figure 1: The coverage confidence pipeline leveraging angle and distance filtering, OBB overlap, and projection overlap ratios to evaluate geometric alignment.
- Optimization-based Face Selection: The selection of optimal faces is formulated as a binary integer programming problem. The objective function incorporates (i) a coverage term, rewarding high-confidence large faces while penalizing faces below a configurable support threshold via a shifted sigmoid function, and (ii) a complexity term, reducing the number of sharp (non-coplanar) edges to promote large planar regions. Hard topological constraints ensure that only edges forming closed, manifold, and watertight meshes are permissible in the solution. The Gurobi solver is employed for efficient optimization under these constraints.
Experimental Setup
Experiments utilize the Hildesheim, Germany dataset, featuring high-density MLS data (Riegl VMX-250 system) and corresponding LOD2 CityGML building models. A 300×300 m urban region containing 100 individual buildings forms the evaluation domain.
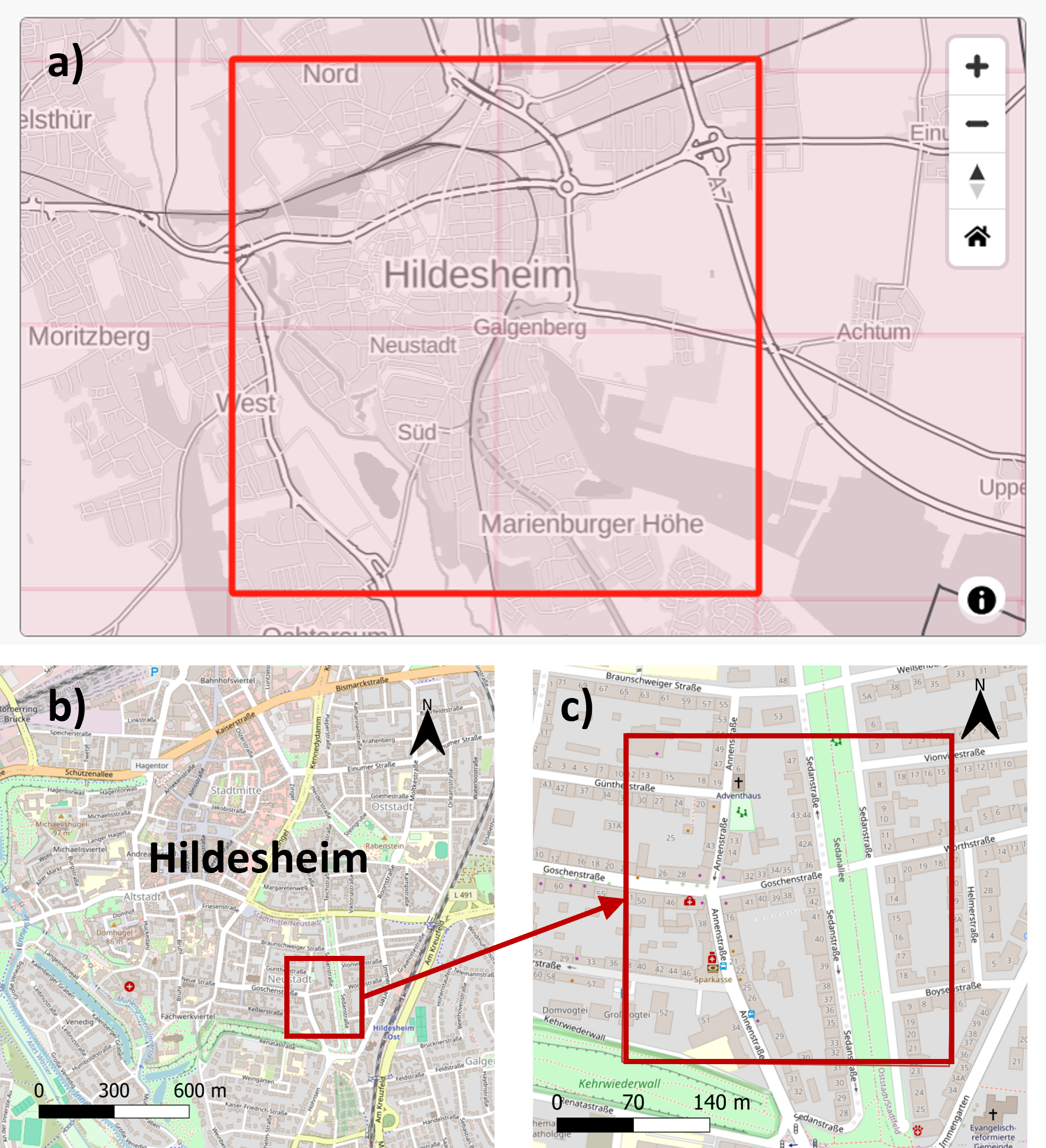
Figure 2: The Hildesheim study area and test site, depicting dataset provenance and selection.
Dataset preprocessing includes segmentation of point clouds into planar clusters, model matching, and the export of building objects as discrete entities.
Evaluation Metrics
The proposed system is quantitatively assessed using:
- Geometric Fidelity: Cloud-to-Mesh (C2M) distance (RMSE, MAE, signed mean, and standard deviation) measures surface alignment against MLS.
- Positional Accuracy: Centroid offset reduction ΔD evaluates systematic model translation relative to new measurements.
- Topological Validity: Watertight rate quantifies the proportion of models meeting manifold and watertight constraints.
A parameter sensitivity study optimizes the support threshold τcov, balancing geometric fidelity with guaranteed manifold output.
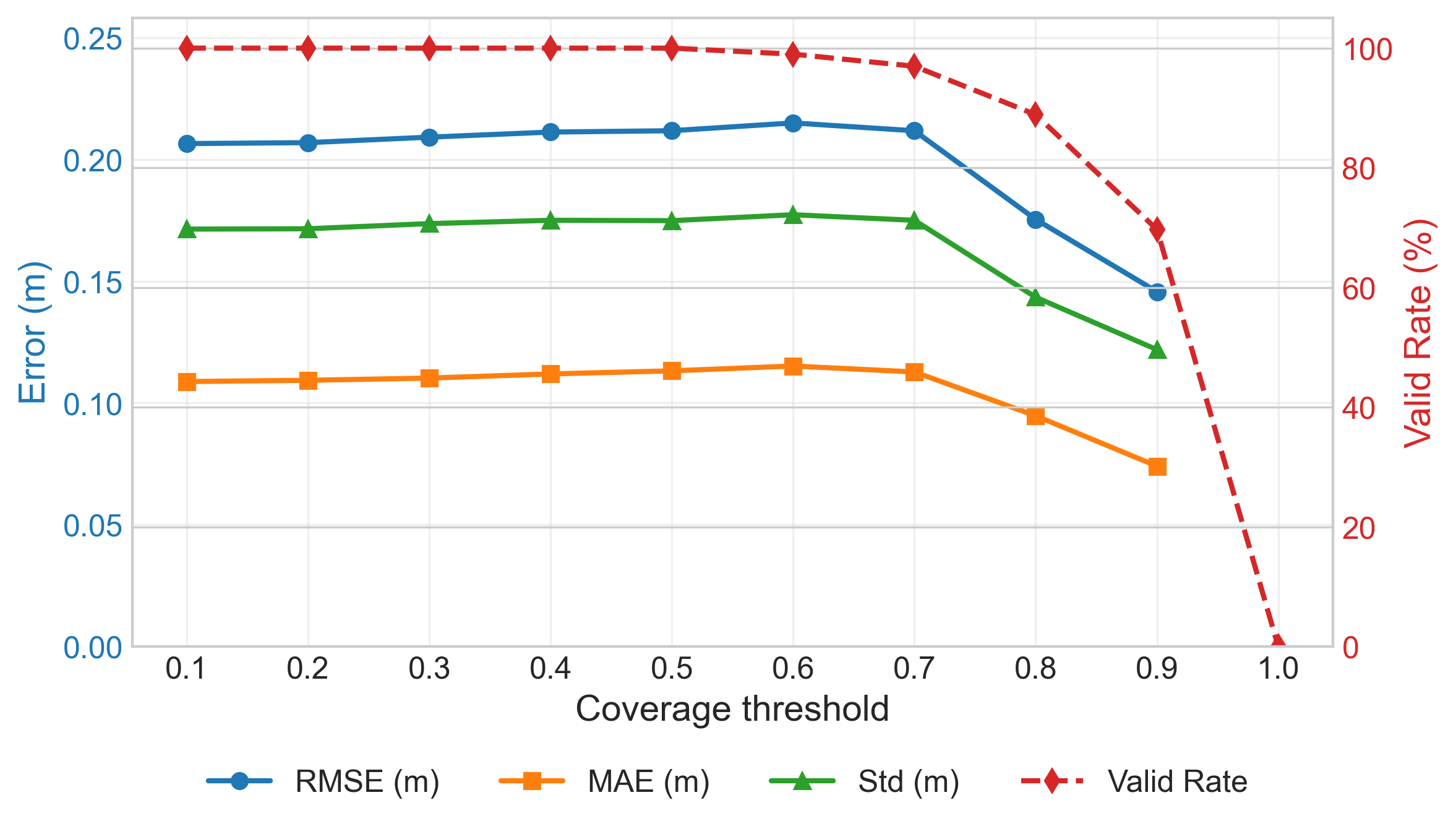
Figure 3: Analysis of C2M errors and manifold validity as a function of the coverage threshold τcov.
Results
Ablation studies and large-scale experiments indicate pronounced reductions in surface misalignment and topological errors. C2M RMSE is reduced from 0.220 m to 0.141 m (36% improvement); mean C2M error is nearly eliminated (0.016 m), and centroid offset is decreased by 5.5 cm. Importantly, all refined models achieve watertightness, up from 42% in the coarse models.
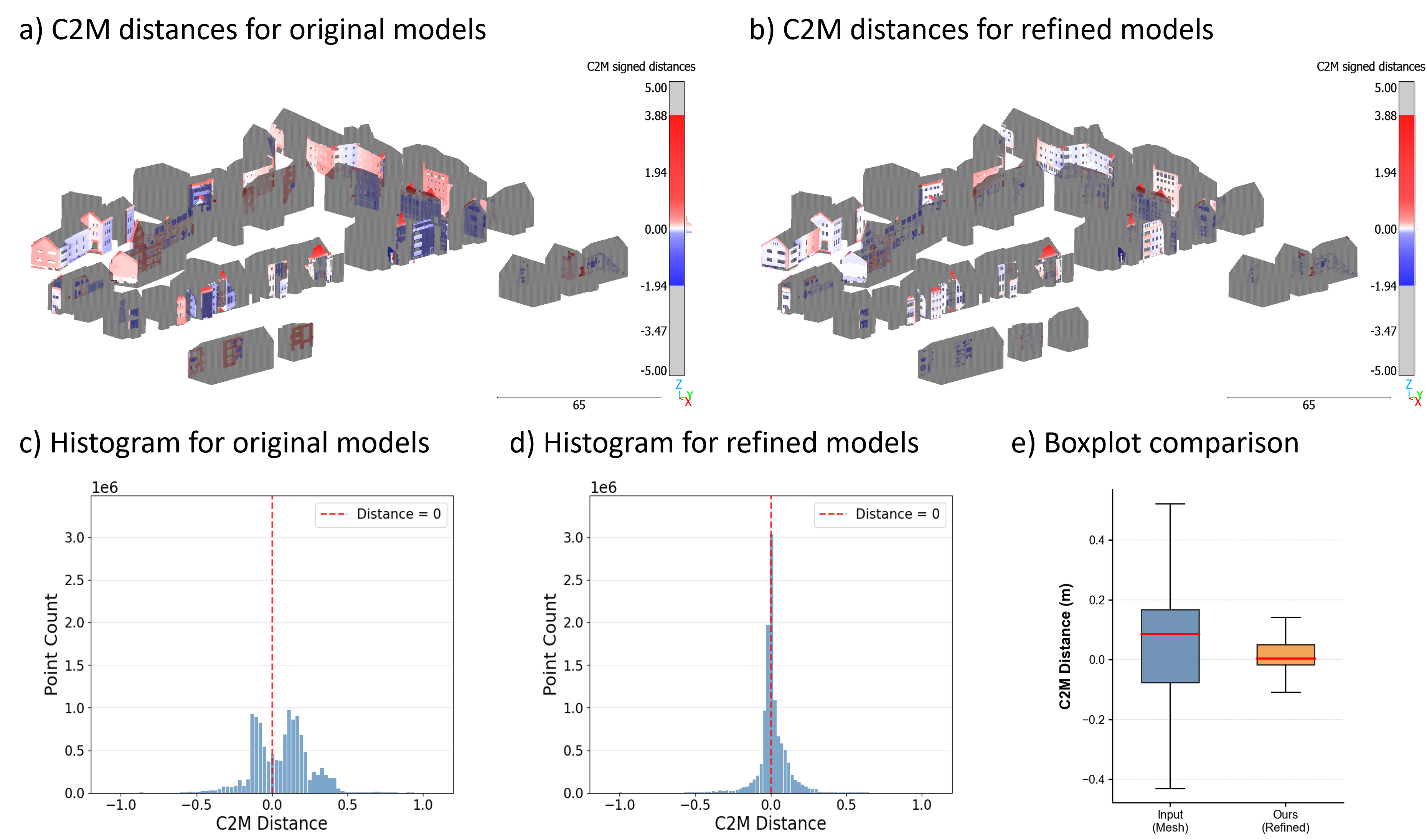
Figure 4: Large-scale results visually demonstrate reduced C2M errors (initial vs. refined) and improved error distribution.
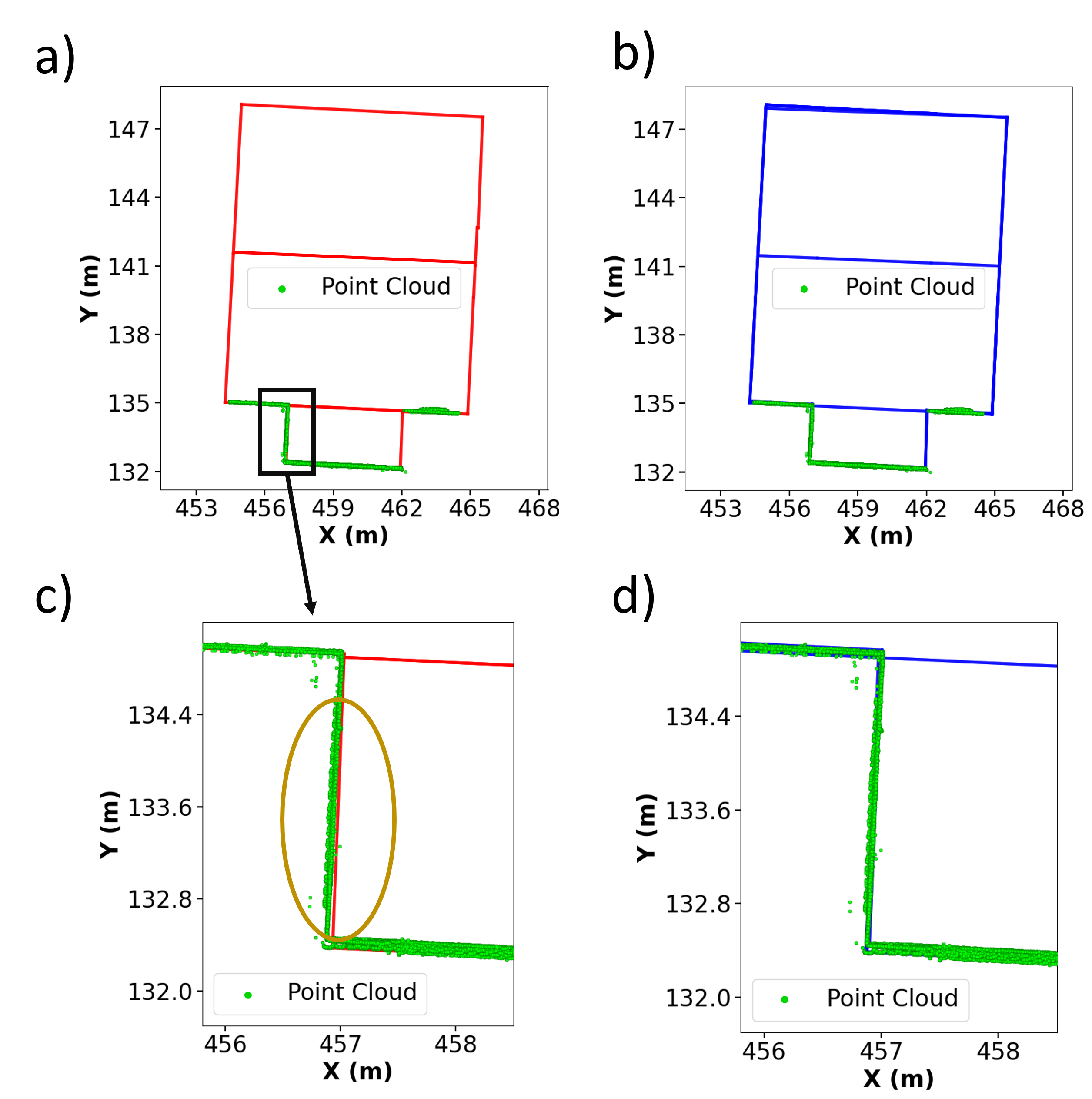
Figure 5: The refined model exhibits centimeter-level alignment with MLS footprints, correcting previously visible facade misalignments.
Progressive visualization illustrates the pipeline's efficacy: from MLS segmentation, facade updating, and mesh integration, through candidate generation to final watertight output.

Figure 6: The progressive refinement pipeline enables data-driven surface updating while preserving valid topology.
Discussion and Implications
The results validate the efficacy of integrating coarse CityGML priors with MLS point clouds through global, confidence-driven optimization. The refined models exhibit centimeter-level geometric and positional alignment, robustly addressing the gaps of prior fusion and repair methods. Topological integrity is strictly enforced, supporting downstream applications demanding closed, valid geometry. Nevertheless, the method assumes sufficient planar coverage in the point cloud, limiting applicability in scenarios dominated by strong curvature or under severe occlusion. Suppressing noise and clutter remains a prerequisite for accurate plane estimation; future research should extend to curved surface priors and incorporate uncertainty quantification for inhomogeneous input quality.
Practically, the system provides a scalable and automated pathway for maintaining and incrementally upgrading digital twins in rapidly evolving urban contexts, mitigating the operational overhead of frequent full reconstructions. The proposed pipeline is directly applicable in city-scale mapping, asset management, and autonomous system navigation, where regularly updated geometric precision is critical.
Conclusion
The confidence-driven refinement framework presented in this paper introduces a systematic, globally optimal approach for upgrading coarse 3D building models with high-precision MLS data. By tightly coupling geometric priors with a binary optimization that rigorously enforces manifold and watertightness, the method achieves substantially improved alignment and error reduction over legacy models, verified both statistically and visually. This approach closes a core gap in urban geospatial modeling—allowing existing large-scale models to stay relevant and accurate as new measurement modalities emerge.