- The paper introduces an exponential-convergent observer framework for nonlinear port-Hamiltonian systems with state-dependent input matrices using an integral mean value representation.
- It employs a polytopic LPV embedding and LMI-based synthesis to design both constant and gain-scheduled observers, ensuring robust error convergence in nonlinear regimes.
- Numerical validation on a dielectric elastomer actuator shows reduced peak and RMS errors, confirming the practical benefits of the gain-scheduled design.
Introduction and Motivation
Port-Hamiltonian (pH) systems provide a structured modeling framework for multiphysics domains, encompassing energy storage, dissipation, and interconnection. This structure guarantees passivity and is well suited for nonlinear control design techniques such as IDA-PBC and Control by Interconnection. However, most observer designs for nonlinear pH systems assume constant input matrices, which considerably limits their applicability to electromechanical systems like DEAs, HASEL actuators, and MEMS devices, where input matrices typically depend on the state due to the underlying physics (e.g., quasi-static electrical assumptions).
The addressed problem is the design of exponential-convergent state observers compatible with nonlinear pH systems featuring state-dependent input matrices. The objective is to enable robust output estimation for scenarios where only partial state measurement is available, which is essential for closed-loop feedback stabilization and real-world deployment in advanced actuation systems.
The considered class of pH systems takes the form:
x˙=(J−R)∇H(x)+g(x)u(t),y=g(x)⊤∇H(x)
with x=[q⊤,p⊤]⊤, Hamiltonian H(x) quadratic in x, and g(x), crucially, depending on q. Structural regularity, including bounded Hessians as well as local Lipschitz continuity of H(x) and g(x) (and its derivatives), is assumed to guarantee well-posedness and applicability of the mean value theorem strategies in subsequent analysis.
Methodology: Integral Representation and Polytopic LPV Embedding
The central challenge arises from the nonlinear, state-dependent term in the observer error dynamics:
x~˙=(J−R)Qx~+(g(q)−g(q^))u(t)+L(y−y^)
where L is the observer gain. The approach hinges on representing the nonlinear term via an integral mean value theorem:
x=[q⊤,p⊤]⊤0
with x=[q⊤,p⊤]⊤1. This yields an LPV error model parameterized along the line connecting x=[q⊤,p⊤]⊤2 and x=[q⊤,p⊤]⊤3.
To enable tractable synthesis, the system is embedded into a polytopic LPV framework by bounding the relevant nonlinear parameters over a compact domain, resulting in a convex combination of linear systems at the vertices of the polytope. The error dynamics thus become:
x=[q⊤,p⊤]⊤4
where x=[q⊤,p⊤]⊤5 are convex weights explicit in the observer estimate and the input, and each x=[q⊤,p⊤]⊤6 encodes a linearization at a polytope vertex.
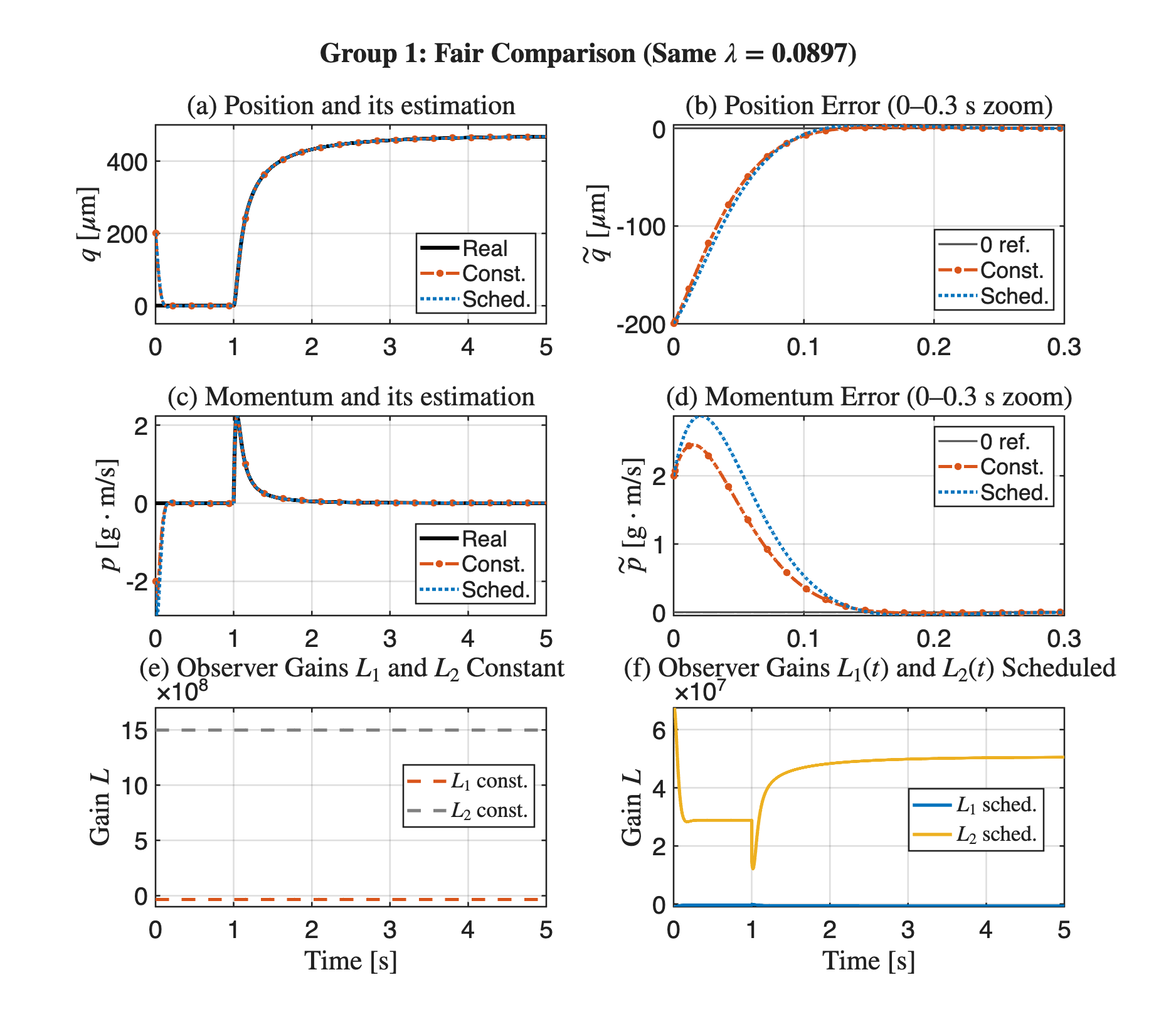
Figure 1: Position estimation x=[q⊤,p⊤]⊤7 vs. x=[q⊤,p⊤]⊤8 in scenario 1, demonstrating comparable transient performance for both observer designs at identical decay rates.
LMI-based Observer Synthesis and Gain Scheduling
Observer synthesis is formalized as an LMI feasibility problem, ensuring exponential convergence at a prescribed rate x=[q⊤,p⊤]⊤9:
H(x)0
If a common H(x)1 and H(x)2 exist, a constant-gain observer is recovered. For cases where more aggressive convergence rates render the common-gain LMI infeasible, vertex-wise LMIs can be solved, yielding gain-scheduled observers:
H(x)3
This interpolation adapts gains over the operating region, minimizing synthesis conservatism and enabling observer design in settings with pronounced nonlinearities.
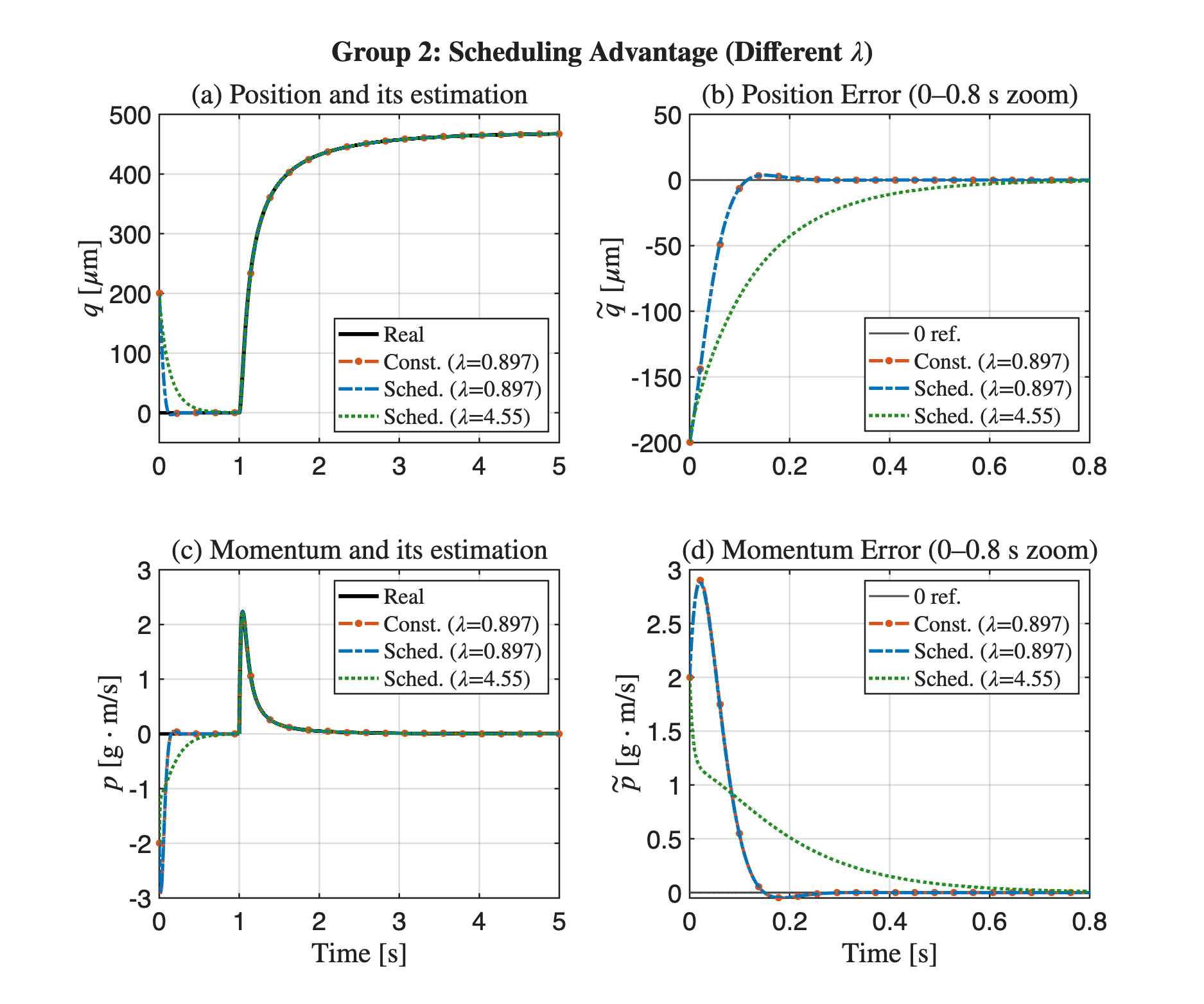
Figure 2: Scenario 2 error analysis across multiple H(x)4 values highlights conservatism reduction with gain scheduling.
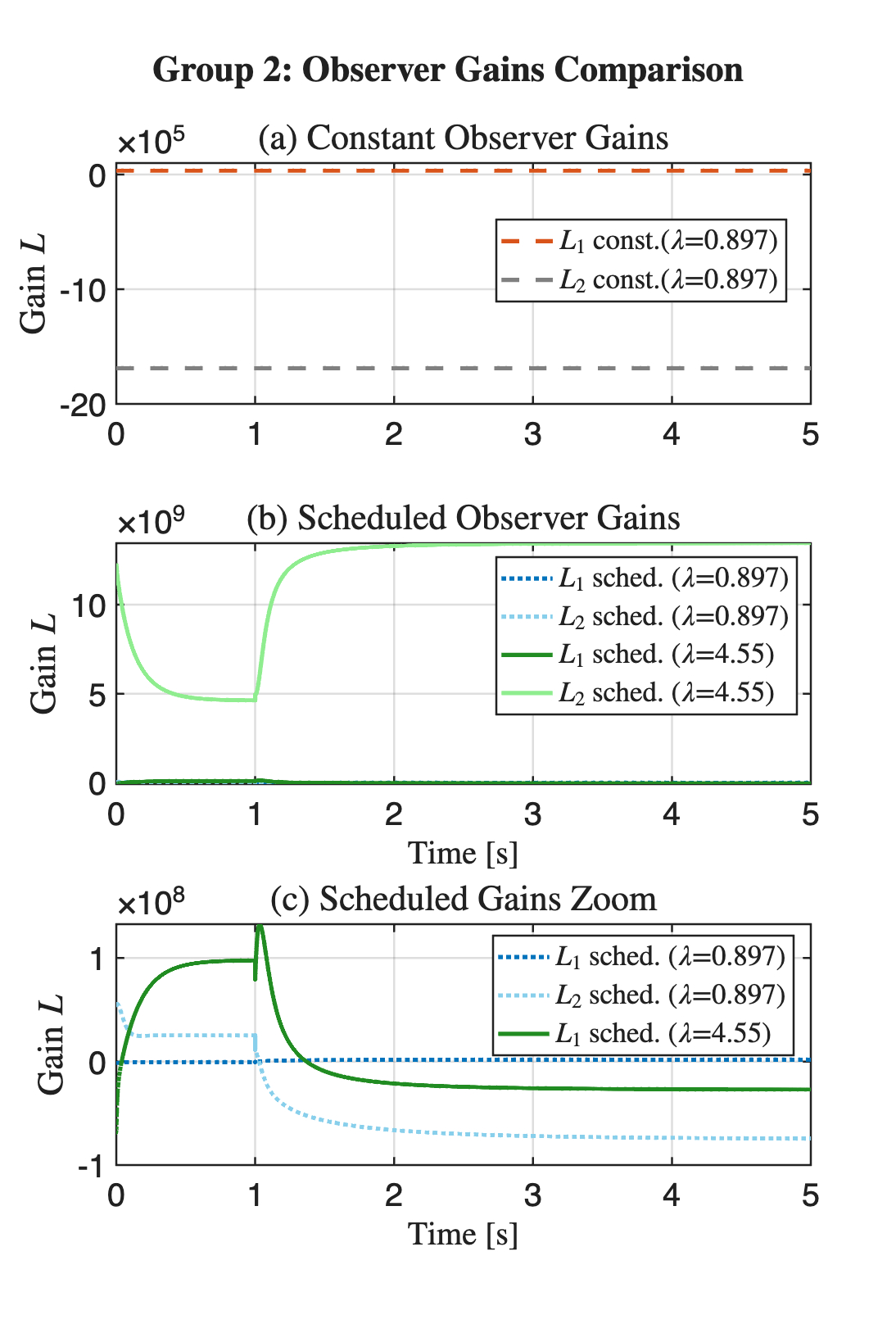
Figure 3: Scheduled observer gains H(x)5 and H(x)6 over time, illustrating adaptation to system operating conditions not possible with constant gains.
Numerical Validation and Comparative Results
A practical validation is conducted on a pH-modeled dielectric elastomer actuator with an input matrix H(x)7, representative of the state-dependent actuation seen in electromechanical systems. After bounding the operating region and enumerating polytopic vertices, LMIs are solved for both observer strategies.
With identical decay-rate settings, both constant and gain-scheduled observers exhibit similar estimation performance, confirming that increased certifiable rates in the scheduling design are a reflection of reduced synthesis conservatism, not of guaranteed faster convergence in identical tuning.
Crucially, at higher decay-rate goals (i.e., beyond the feasibility of the constant-gain LMI), only the gain-scheduled observer remains feasible, achieving substantial improvements in error metrics (e.g., peak error and RMS error reductions of 31% and 34%, respectively) and eliminating overshoot, albeit with some increase in settling time.
Implications and Future Prospects
This methodology establishes, for the first time in the context of pH systems with nonlinear input matrices, a systematic observer design framework that is both verifiably convergent (through an explicit quadratic Lyapunov certificate) and practically implementable. The gain-scheduled observer architecture allows for synthesis in regimes inaccessible to constant-gain designs, directly addressing the structural limitations imposed by state-dependent actuation in physically realizable systems.
These results have immediate applicability in advanced actuator control (DEAs, HASELs, MEMS, magnetic levitation) and lay groundwork for further advances. Theoretically, extension to more general nonlinearities—non-quadratic Hamiltonians, state-dependent damping/interconnection structures—remains an open direction. Experimentally, deployment on actual hardware (e.g., HASEL platforms) will test robustness against model uncertainties and unaccounted nonlinearities.
Conclusion
A novel observer design methodology for nonlinear port-Hamiltonian systems with state-dependent input matrices is presented through an integral mean value-based LPV embedding and polytopic LMI analysis. Gain-scheduled observers offer significant reduction in conservatism over constant-gain approaches, certifying stability in highly nonlinear, practically relevant regimes. This work bridges a crucial gap for observer design in multiphysics-control applications and provides a foundation for further research in robust estimation and implementation in highly nonlinear energy-based systems.