- The paper presents a novel VQ-AE based controller that enforces set invariance with minimal distinct open-loop control sequences.
- It achieves robust safety with as few as 14 codebook entries and certifies invariance using an iterative forward certification process with SOS programming.
- The work demonstrates that effective control can be maintained at low sensor resolutions, enabling resource-efficient, safety-critical autonomous systems.
This work rigorously investigates the minimal necessary control complexity for enforcing forward invariance of a compact safe set Q under sampled-data control for nonlinear systems. The analysis is motivated by the observation that prevailing learning-based controllers for safety-critical autonomous platforms (such as quadrotors) dramatically over-provision distinct control signals, sensing, and computation compared to what is strictly required for set invariance. The central question is: What is the smallest number of distinct open-loop control sequences that suffices to ensure all system trajectories initialized in Q remain within Q for all time under periodic actuation?
This question is made precise through the lens of invariance entropy hinv(Q), quantifying the minimal control data rate required, and through the concept of T-spanning sets—a minimal cover associated with open-loop signals guaranteeing invariance over each control horizon. The work links recent information-theoretic bounds to constructive controller synthesis, which had been largely missing in prior literature.
Vector-Quantized Autoencoder Controller Architecture
The proposed solution bridges theory and practice by synthesizing controllers with explicit codebooks and state partitions via a variant of the VQ-AE. The encoder network Eθ discretizes the state space into regions indexed by a finite codebook, while the decoder Dϕ maps these indices to open-loop control policies over each sampling horizon. This design inductively induces a (potentially minimal) partition of Q, each mapped to a fixed control sequence.
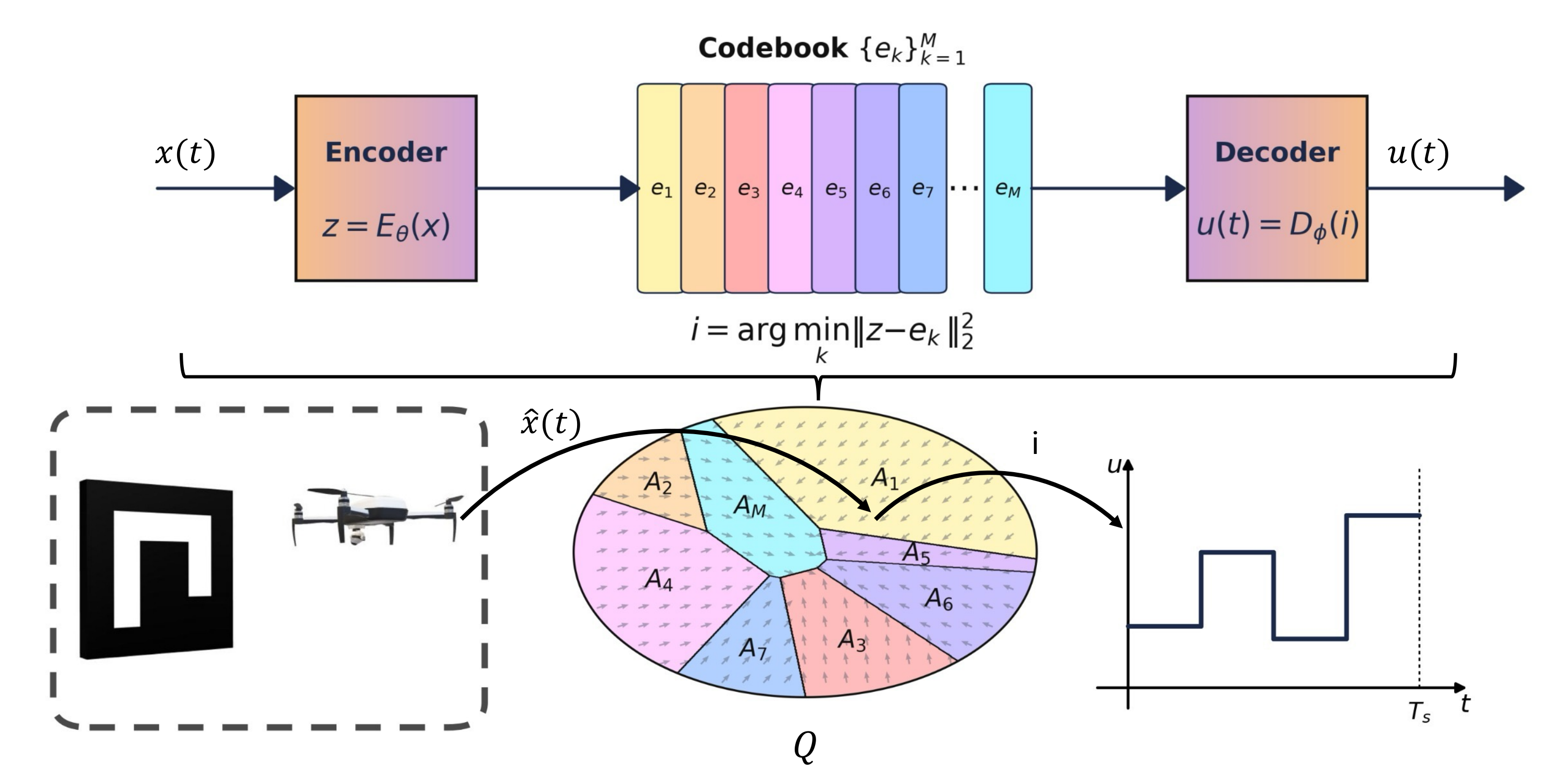
Figure 1: The VQ-AE controller architecture; the quadrotor’s state estimate is discretized via the encoder, which induces a state-space partition, and the decoder maps each region index to an open-loop control ensuring inward trajectories for invariance.
The overall loss function used for VQ-AE training balances invariance violation, codebook entropy (to encourage minimal code usage), encoder-commitment, and control magnitude regularization. Boundary-sample reweighting ensures that violations near ∂Q are prioritized during training. The controller output comprises piecewise-constant open-loop controls for each partition, respecting causal implementation.
Controller Certification: Forward Reach Enclosure and Sum-of-Squares Analysis
A significant contribution is the Iterative Forward Certification (IFC) algorithm, which enables formal set invariance certification for controllers produced by the VQ-AE pipeline. Under the restriction of an affine, invertible encoder, the partition cells become polytopic and thus amenable to tractable verification via reachable-set over-approximation and SOS programming.
The verification proceeds by:
- Computing Lipschitz overapproximations of region-wise reachable sets via Gronwall-based methods.
- Updating polytopic enclosures iteratively to ensure inclusion of all reachable states for each open-loop segment.
- Using an SOS-based S-procedure to confirm V˙(x)≤0 over each intersection of the reachable set and Q0, exploiting a polynomial surrogate for trigonometric dynamics while bounding the surrogate’s error.
This yields provable forward invariance for the closed-loop system under the trained and pruned codebook, with every region-control pair explicitly certified or computationally verified to ensure all starting points in Q1 remain within Q2.
Empirical Results: Codebook Compression, Baseline Comparison, and Visual Sensing
Control Codebook Compression
Compression experiments reveal that the closed-loop invariance property holds with as few as 14 codebook entries. Controllers using fewer codes show abrupt invariance collapse, suggesting an empirical lower bound on Q3 under the given architecture. Interestingly, a Q4 reduction in codebook size relative to uniform grid quantization is achieved while preserving invariance at nearly 100% for a 12-dimensional nonlinear quadrotor.
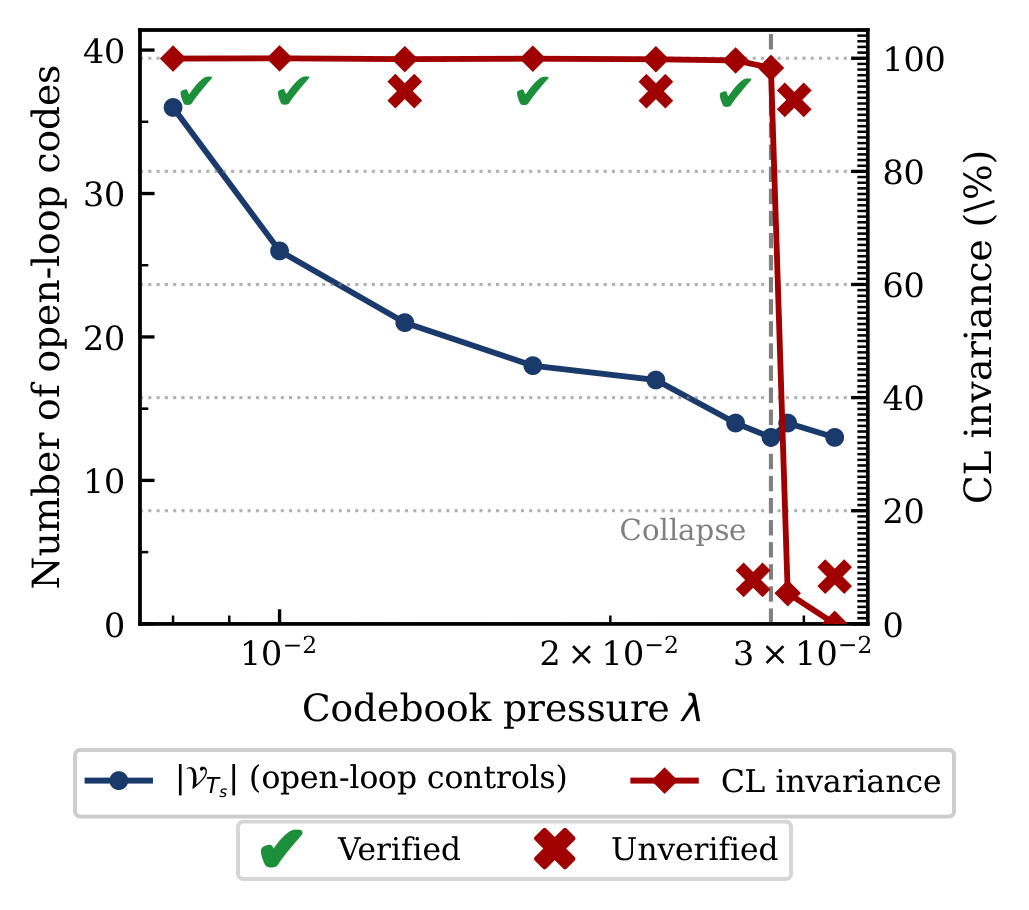
Figure 2: The codebook size Q5 and closed-loop invariance rate as a function of the codebook pressure; invariance is robust to aggressive compression down to approximately 14 codes.
Baseline Comparisons
Comparisons with uniform grid quantization (with nearest-neighbor assignment and closed-loop LQR) as well as non-jointly optimized partitions highlight a key empirical finding: effective invariance requires joint encoder-decoder co-design. Large, uniformly gridded controllers (e.g., Q6 or Q7 cells) do not yield better safety, are often dramatically less efficient, and may suffer from quantization-induced failures, especially near Q8.
Vision-Based Control and Sensing Resolution
The paper provides a connection between control minimality and sensor resolution requirements, hypothesizing that the observer needs only to identify the correct partition region, not the full state. Experiments with a ResNet-18-based observer reconstructing state estimates from low-resolution images of an ArUco marker demonstrate that closed-loop invariance is preserved down to 65-pixel image inputs. Terminal safety remains robust even at 30-pixel resolution, indicating that the system can tolerate substantial perceptual degradation without loss of long-term safety.
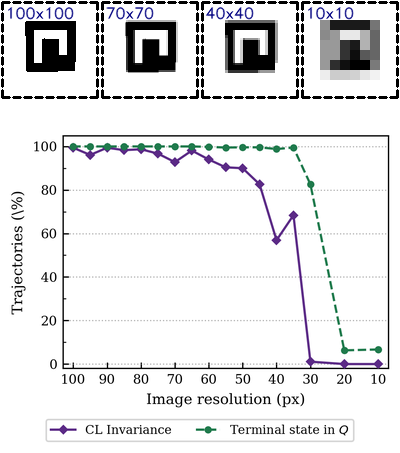
Figure 3: Closed-loop invariance and terminal safety rates over ten seconds as image resolution decreases; safety remains high until approximately 65 pixels, below which observer-state misclassifications cause frequent violations.
Theoretical and Practical Implications
This approach offers a direct, scalable means to synthesize certifiably invariant controllers with low communication and memory footprint, rigorously connecting invariance entropy to neural architecture codebook size. It demonstrates that for safety-critical applications, minimal discrete control policies discovered via learning can outstrip both dense grid-based tabulation and traditional continuous-state LQR, on both efficiency and verifiability grounds.
Moreover, results on minimal perceptual requirements establish a formal basis for co-designing perception and control stacks, suggesting that resource-constrained embedded platforms can be engineered with much lower sensing and computational requirements than previously assumed—provided the controller partition is carefully optimized for the invariance objective.
Future Perspectives
This synthesis/certification pipeline, while effective for affine encoders and regions where surrogates for nonlinear dynamics are valid, raises open directions. Extending the certification methodology to generic nonlinear encoders (thus nonconvex partitions), tighter numerical lower bounds for Q9, and verification for high-dimensional, non-polynomial systems are key next steps. Additionally, leveraging this controller-perception codebook co-design paradigm for distributed or learning-augmented multi-agent systems is an enticing possibility.
Conclusion
This paper provides a constructive, certifiable path from minimal control entropy theory to practical, low-complexity controller synthesis for nonlinear systems via VQ-AEs, with strong numerical results and formal safety guarantees. The connection between partition cardinality and perceptual resolution exposes new avenues for joint controller–observer resource optimization in autonomous, safety-critical AI systems (2604.03132).