- The paper introduces a robust beamforming design for D-ISAC networks by explicitly modeling statistical RCS fluctuations and phase synchronization errors.
- It employs semidefinite relaxation and successive convex approximation to address non-convex optimization challenges while enhancing sensing SCNR by up to 3 dB.
- The design reveals a trade-off between communication SINR and sensing performance, with global power constraints yielding superior detection probability.
Introduction and System Architecture
The paper "Robust Beamforming Design for Coherent Distributed ISAC with Statistical RCS and Phase Synchronization Uncertainty" (2604.02634) addresses the practical limitations of distributed integrated sensing and communication (D-ISAC) networks, focusing on coherent cooperation among spatially distributed nodes. It explicitly models critical uncertainties in real-world deployments: residual phase synchronization errors leading to imperfect channel state information (CSI) and statistical radar cross-section (RCS) fluctuations due to angle-of-arrival (AoA) uncertainties during target detection.
The system consists of multiple ISAC nodes, each equipped with MIMO transceivers, collaboratively transmitting superposed communication and sensing waveforms. Reflected sensing echoes are centrally collected and processed at a CU. Both statistical RCS variation and phase synchronization errors are accounted for in robust beamforming optimization.
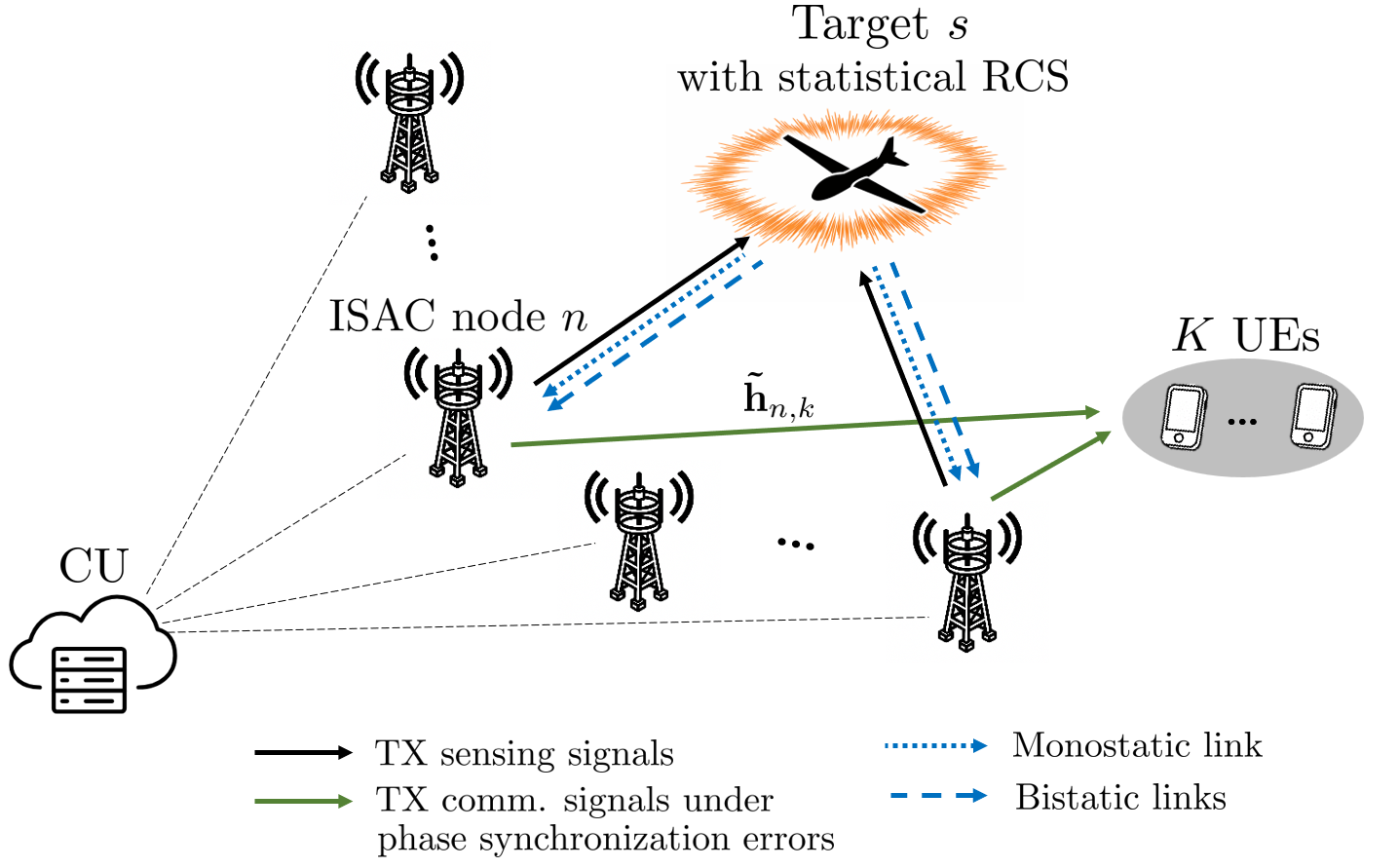
Figure 1: Network architecture depicting spatially distributed ISAC nodes with centralized echo processing and explicit modeling of RCS and phase synchronization uncertainties.
Statistical Modeling of RCS and Phase Synchronization Errors
The target RCS is modeled statistically to capture fluctuations arising from aspect-angle and scattering mechanisms. The paper adopts two primary statistical distributions: generalized Chi-square and Swerling I models. The Chi-square model is characterized by smoother angular fluctuations, while Swerling I exhibits pronounced variance across observation angles, resulting in more significant performance uncertainty for stealth targets or platforms utilizing radar-absorbing materials.
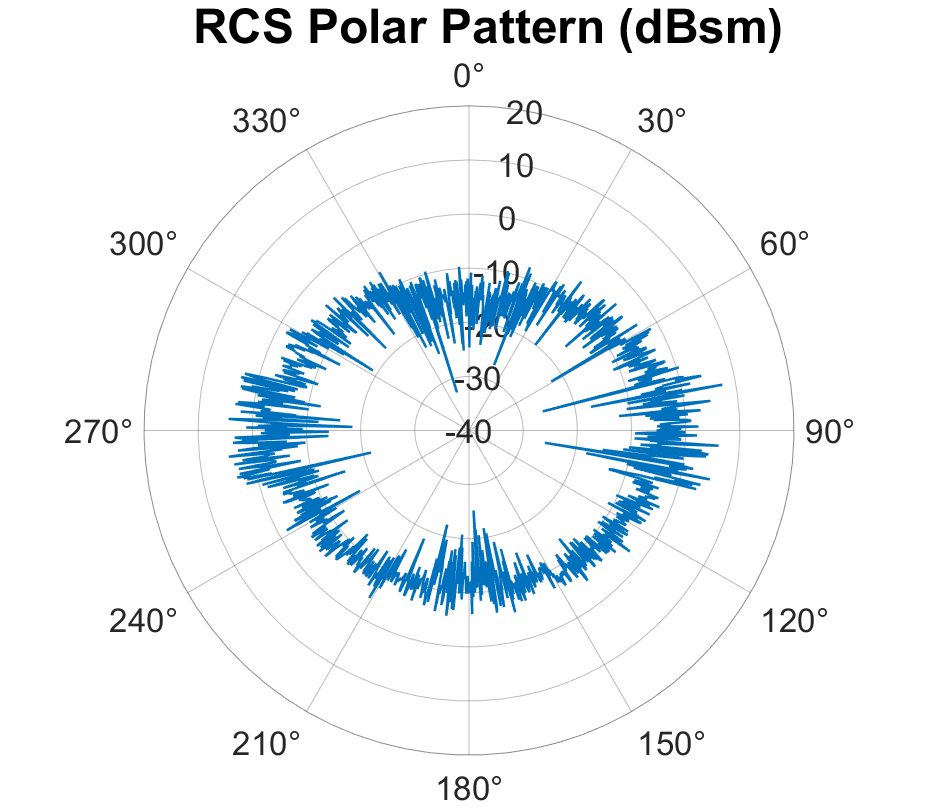
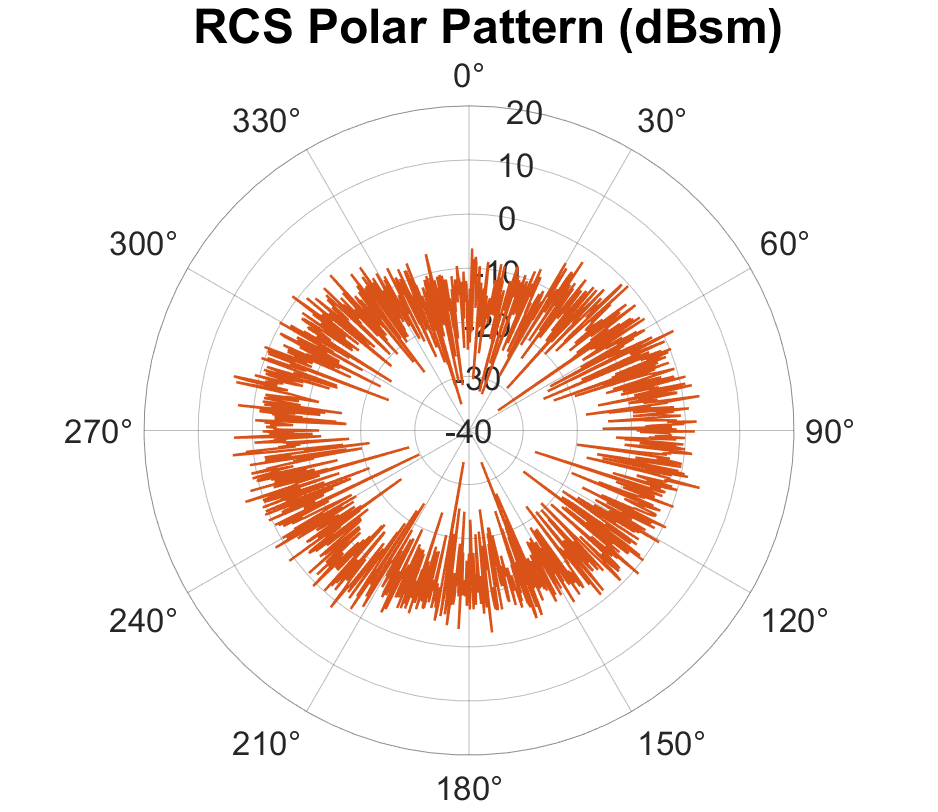
Figure 2: Chi-square RCS model illustrating angular fluctuation behavior for centrally located targets.
Phase synchronization errors are incorporated via bounded uncertainty regions for each node's residual phase offset. The channel perturbation induced by these errors is modeled to quantify the loss in coherent signal combining capability, both for communication and sensing channels.
The robust beamforming problem pursues the maximization of the expected Kullback-Leibler divergence (KLD) between target-present and target-absent hypotheses, averaged over statistical RCS realizations. Communication quality-of-service is enforced via per-user minimum SINR constraints under imperfect CSI, and the global optimization must satisfy a total or per-node/antenna power constraint.
The optimization is highly non-convex due to fractional quadratic SINR constraints and log-determinant structure in the KLD objective. The authors employ semidefinite relaxation (SDR) and successive convex approximation (SCA) to transform the problem, enabling efficient iterative solution.
Algorithmic Framework and Convergence
The proposed beamforming algorithm sequentially incorporates phase synchronization uncertainties, AoA mismatch, and statistical RCS variance. At each SCA iteration, a convex surrogate is constructed for the log-determinant objective, and the relaxed problem is solved via SDP techniques.
Convergence analysis confirms monotonic improvement and finite-time stability of the objective sequence. Feasible rank-one beamforming vectors are recovered via eigen-decomposition when necessary.
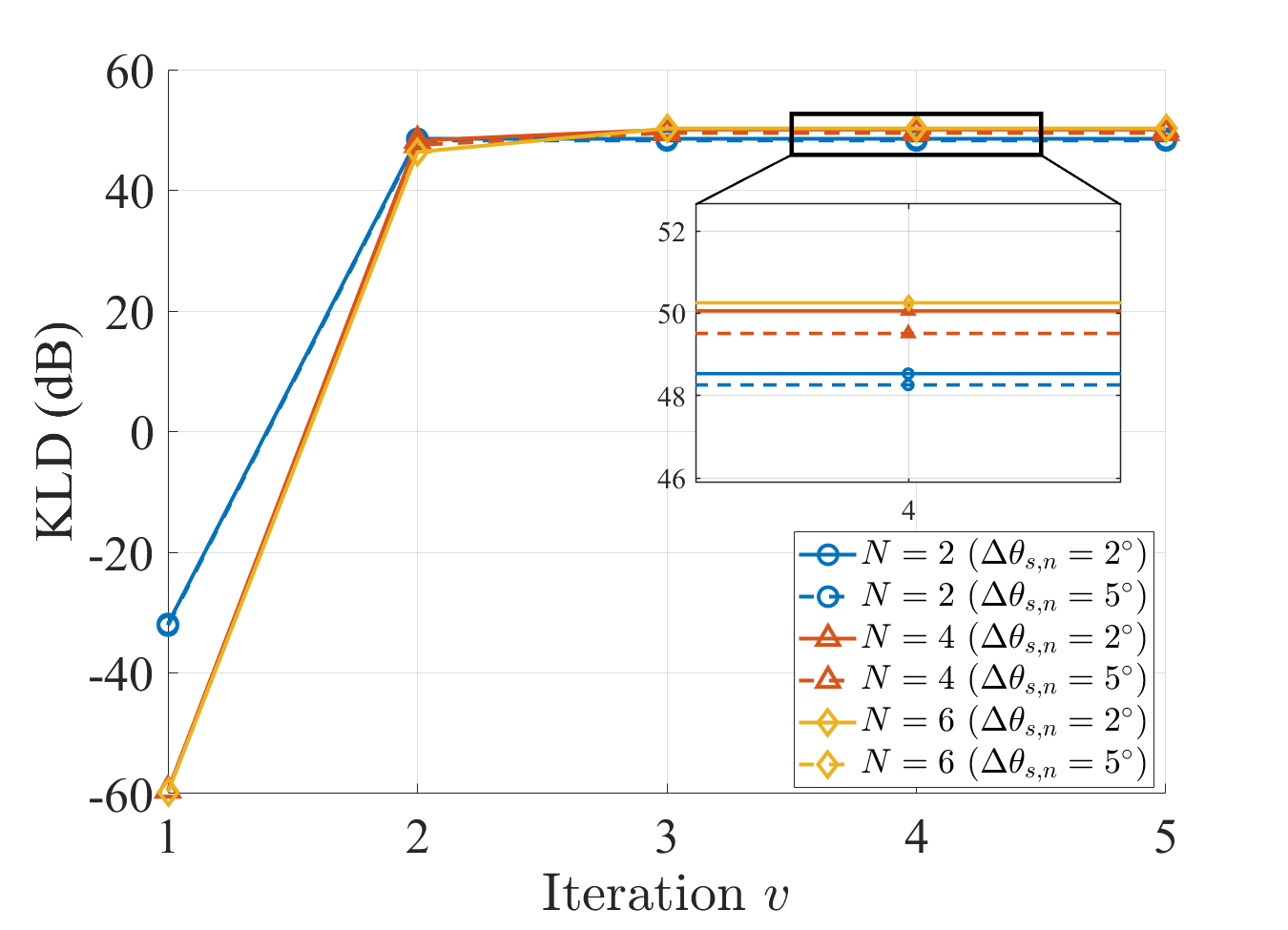
Figure 3: Fast convergence of the proposed algorithm demonstrated under moderate network size and SINR constraint.
Numerical Results: Sensing-Communication Trade-Off and Robustness
Extensive numerical evaluations validate the robustness and practicality of the method:
- Superior sensing performance: The optimized beamforming yields up to 3 dB SCNR gain over conventional ZF schemes for sensing, even under communication SINR constraints. Distributed multi-node setups outperform single-node systems for the same total antenna budget due to spatial diversity and coherent combining gains.
- Trade-offs: Increasing SINR thresholds reduces achievable sensing performance (KLD), manifesting the fundamental sensing-communication trade-off in resource-constrained ISAC networks.
- Impact of uncertainty parameters: Detection probability degrades with increasing residual phase synchronization error δ, but robust optimization mitigates losses and maintains reliable detection across practical uncertainty ranges.
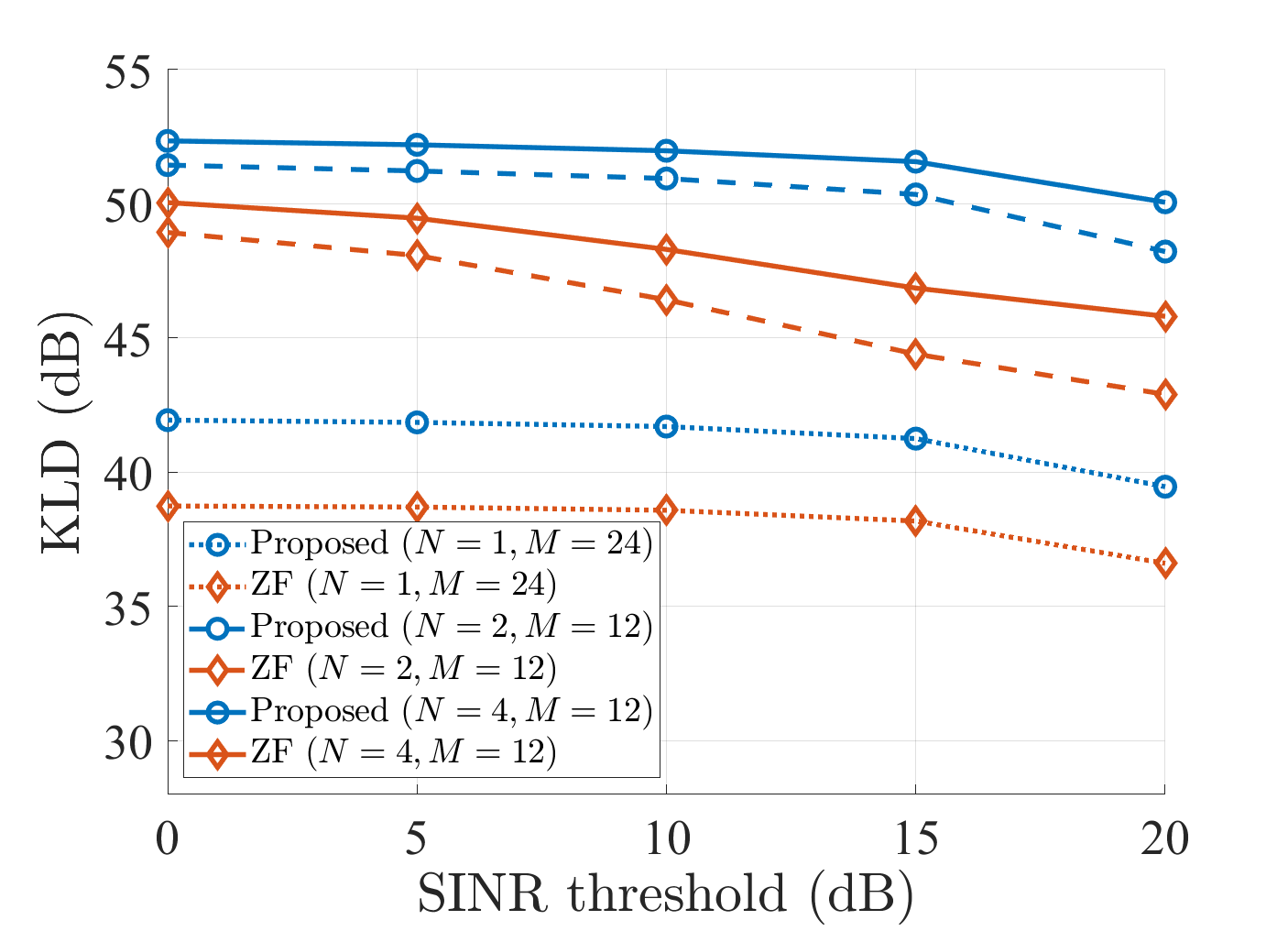
Figure 4: KLD versus SINR threshold Γc, showing communication-sensing trade-off and robustness across distributed deployments.
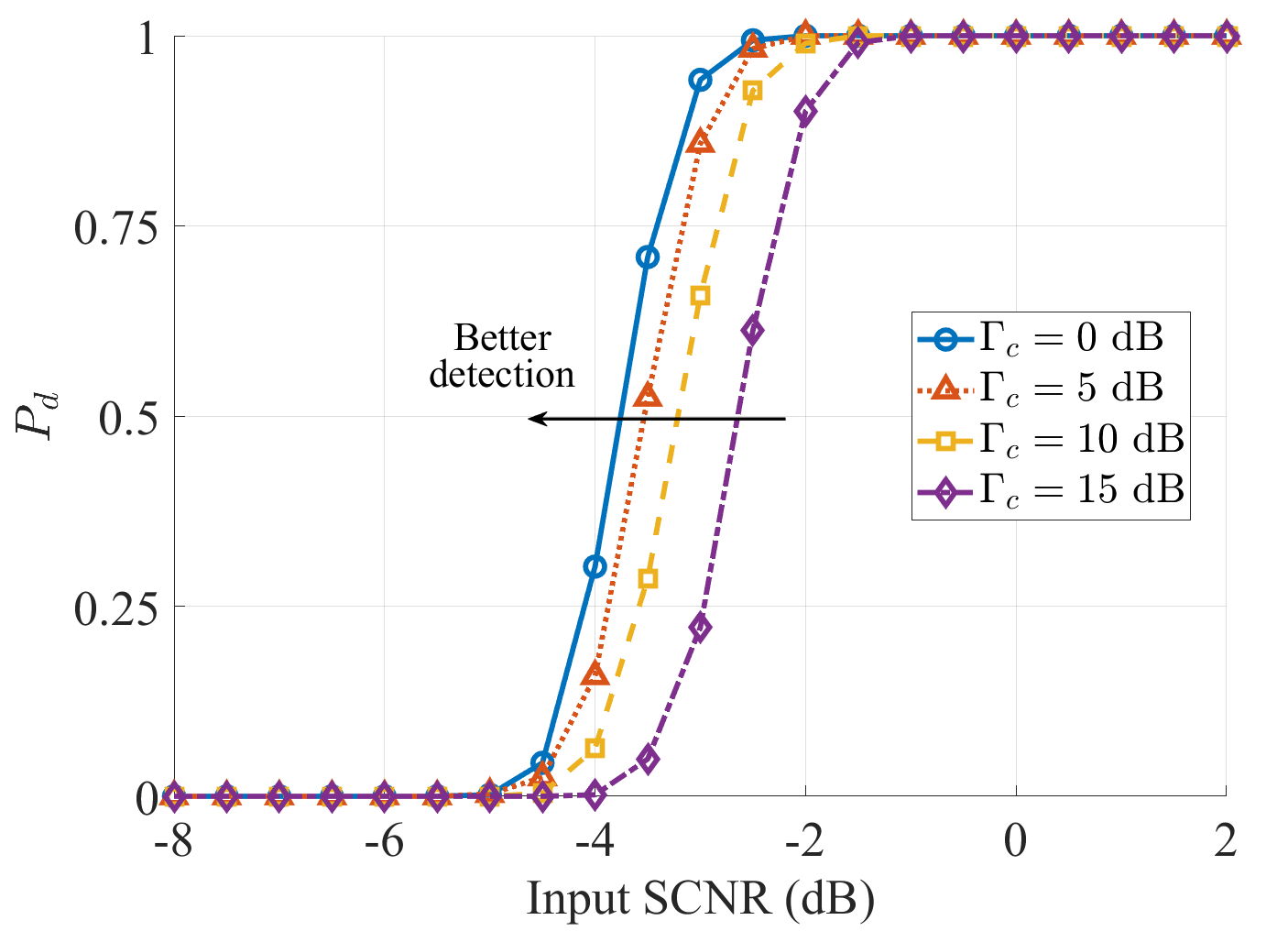
Figure 5: Detection probability versus input SCNR for varying SINR thresholds, demonstrating performance sensitivity and probabilistic gains from robust optimization.
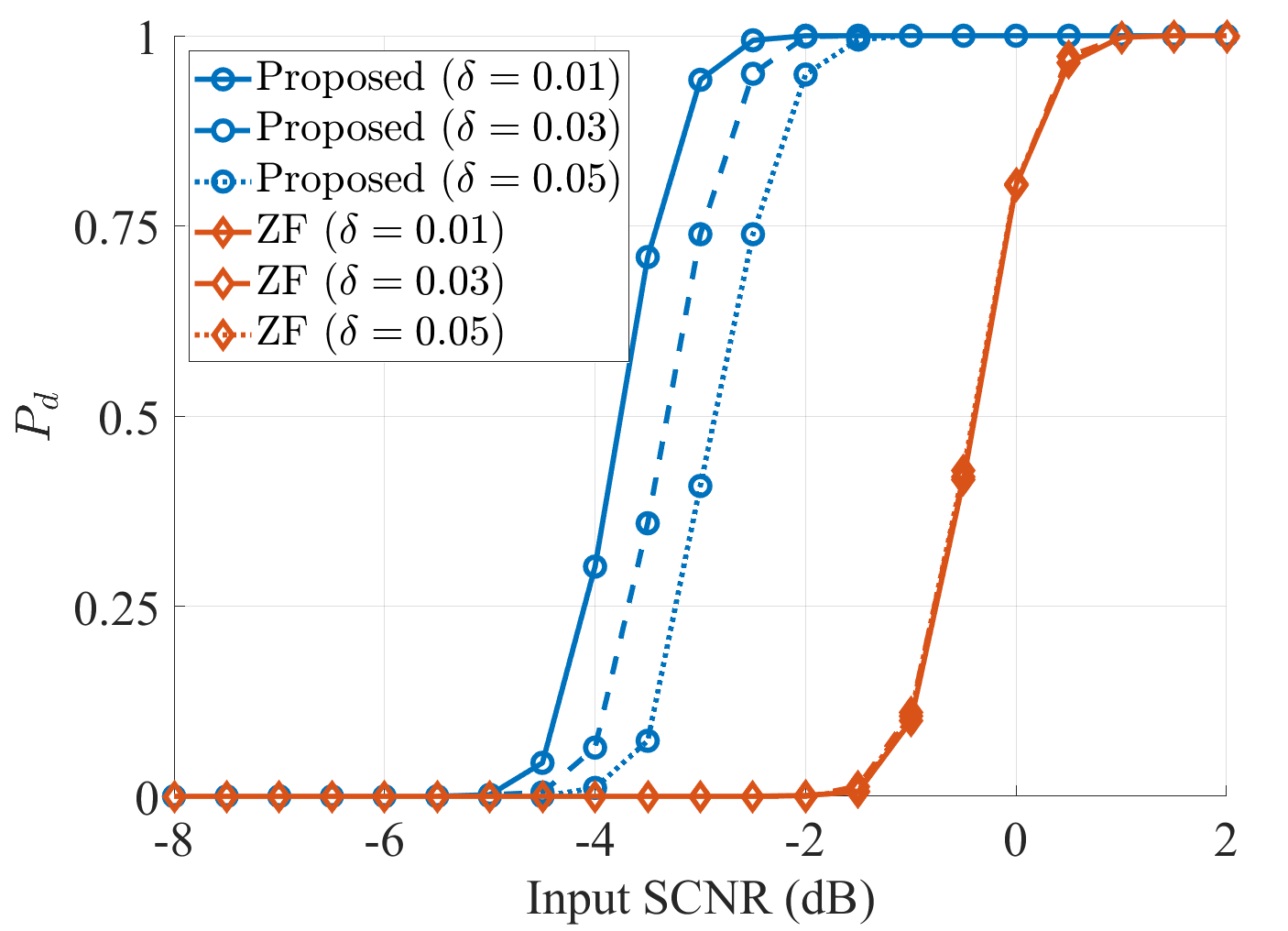
Figure 6: Detection probability deterioration as phase synchronization uncertainty increases; robust optimization retains performance advantage over benchmarks.
Power Constraints and RCS Statistical Modeling
Global (system-level) power constraints provide greater flexibility for beamforming optimization, yielding higher detection probability and up to 2 dB SCNR improvement over per-node or per-antenna constraints.
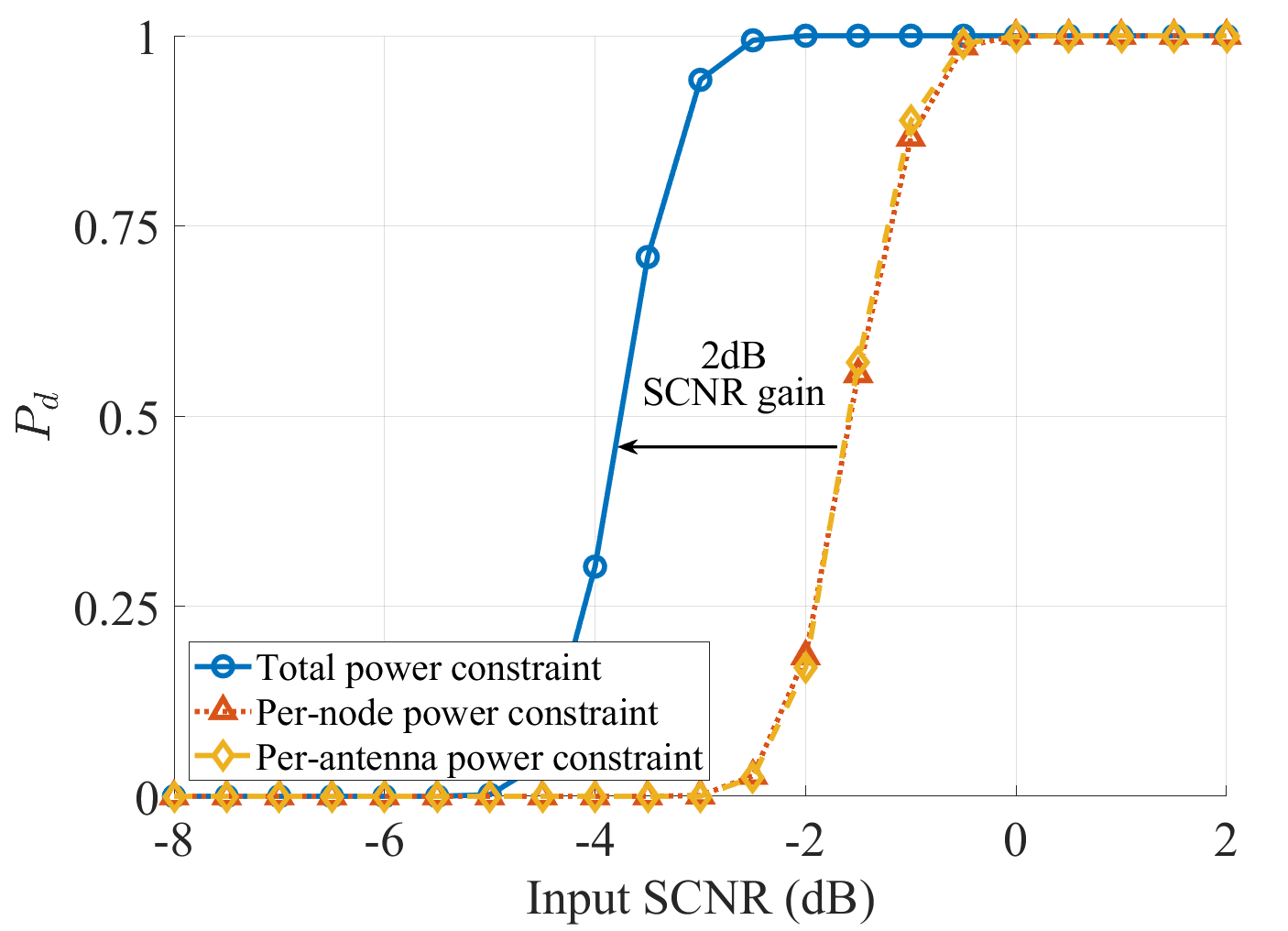
Figure 7: Comparison of detection probability across different power constraint regimes, highlighting the superiority of global power allocation.
RCS fluctuation models directly impact sensing performance uncertainty. The Swerling I model, reflecting enhanced fluctuation, yields a broader empirical KLD variation, underscoring the necessity of statistically robust designs.
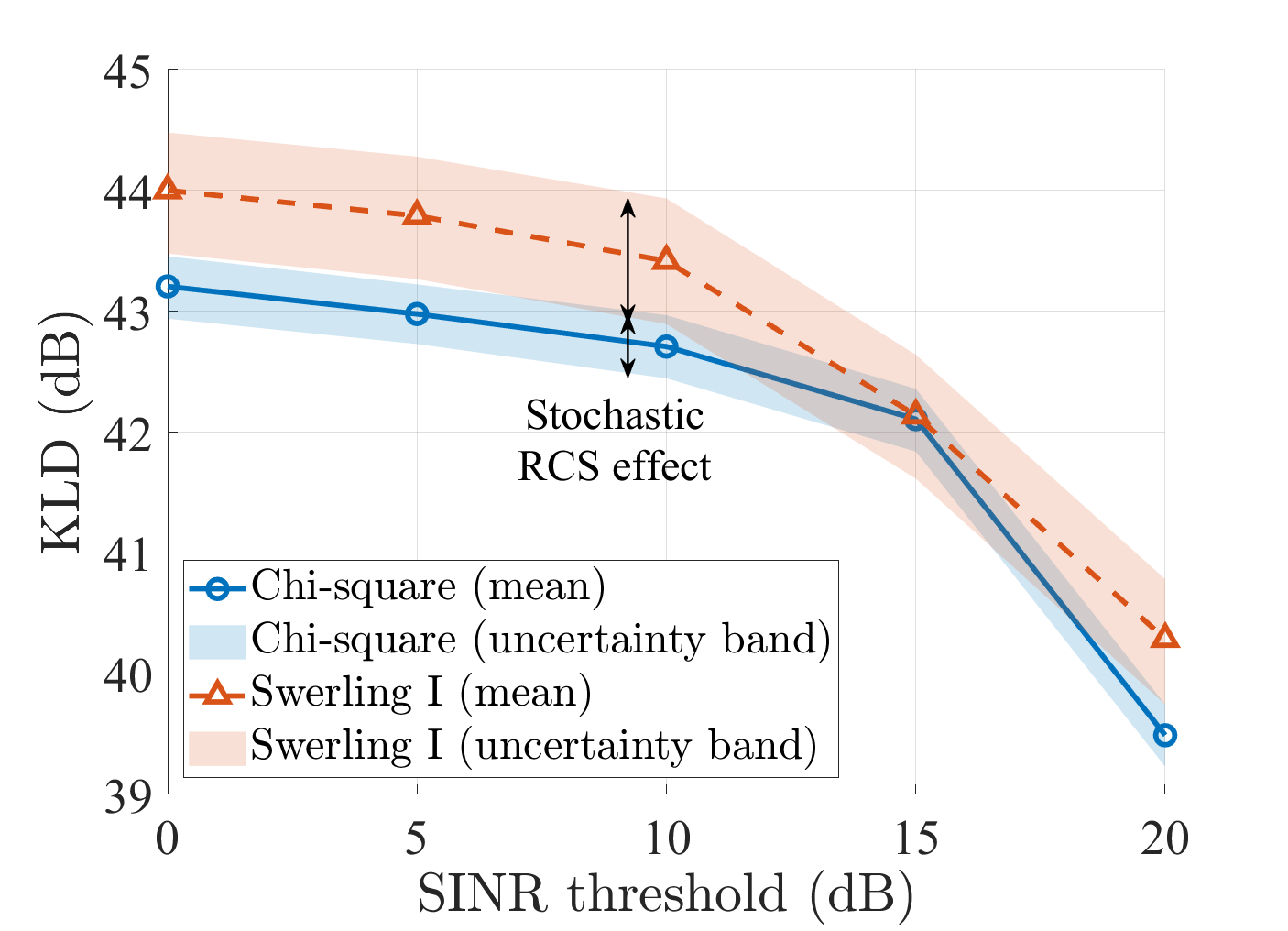
Figure 8: KLD performance for Chi-square and Swerling I RCS models, emphasizing increased uncertainty and robustness in sensing trade-off.
Implications and Theoretical Outlook
This work advances D-ISAC network design by rigorously accommodating practical uncertainties in both sensing and communication dimensions. The statistical framework for RCS and explicit phase error modeling enable robust operation for stealth and maneuvering targets under realistic network impairments. The optimization strategy is broadly applicable to distributed radar-communication scenarios and portends enhanced performance in future 6G/7G networks emphasizing co-design of sensing and communications.
Potential extensions include generalization to multi-target scenarios and integration with OFDM-based signaling, further elevating D-ISAC applicability in heterogeneous environments.
Conclusion
The paper presents a robust optimization architecture for coherent distributed ISAC, explicitly incorporating statistical target RCS and phase synchronization uncertainties in both communication and sensing beamforming. Strong numerical gains on SCNR and detection probability, verified across diverse uncertainty regimes and power constraints, illustrate the efficacy of the approach. The method delivers practical robustness against real-world impairments and advances computational strategies for network-level ISAC optimization, with significant theoretical and practical implications for the evolution of joint communication and sensing systems.

