- The paper introduces a Rockafellian relaxation method that extends risk-neutral optimization to risk-averse settings using CVaR for mitigating adversarial and natural data corruptions.
- It establishes existence, optimality, and convergence of minimizers in PDE-constrained stochastic control problems under both infinite-dimensional probability spaces and heavy-tailed perturbations.
- Numerical illustrations demonstrate significant error reductions and robust recovery of optimal controls, even in scenarios with severe outlier contamination and distributional ambiguity.
Risk-Averse Optimization Under Distributional Uncertainty with Rockafellian Relaxation
Introduction and Theoretical Framework
The paper "Risk-averse optimization under distributional uncertainty with Rockafellian relaxation" (2604.00226) proposes a robust framework to address risk-averse optimization in the presence of distributional ambiguity. The authors consider stochastic optimization problems constrained by PDEs, focusing on frameworks where the underlying probability law is prone to both adversarial and natural corruption. The central technical contribution is the extension of Rockafellian relaxation, originally crafted for risk-neutral contexts, to accommodate coherent risk measures—specifically Conditional Value-at-Risk (CVaR)—in the presence of corrupted probabilistic models and data outliers.
The theoretical architecture builds on multiple axes:
- The treatment of stochastic programs with both infinite-dimensional probability spaces and general sample spaces, circumventing the conventional constraint to finite-noise settings.
- The synthesis of distributionally robust optimization (DRO) and distributionally optimistic optimization (DOO) methodologies. The approach leverages the minimax characteristics of risk-averse formulations while embedding a relaxation through Rockafellian constructs, effectively allowing for perturbations in both the probability distribution and the support.
- The derivation of well-posedness results for PDE-constrained optimal control under these relaxed, corrupted settings, and the proof of weak-strong Γ-convergence and existence of minimizers.
- The establishment of first-order optimality conditions under appropriate regularity for the control-to-state map and objective.
Key to the proposed framework is the lift from the original functional to a Rockafellian involving both decision and perturbation variables, enabling a more nuanced and computationally tractable treatment of adversarial corruption and ambiguity. The flexibility in the design of Rockafellians allows explicit encoding of both robustness and optimism, aligning with robust statistics and modern DRO theory.
Given the underlying Banach spaces (Z for controls, U for states, and general sample space Ξ), and a cost functional involving a coherent risk measure R (with emphasis on CVaR), the standard risk-averse stochastic optimal control problem takes the form:
minz∈ZadR[f(ξ,z)],
where f measures cost relative to random input ξ and control z. In the context of stochastic PDE constraints, this extends to minimization over (z,γ) pairs, with auxiliary smoothing introduced for computational tractability.
In the presence of uncertain probability laws and outliers, the framework introduces corruption maps on both distribution and support, indexed by (Z0, Z1). Rockafellian relaxation is then expressed as a bivariate functional:
Z2
subject to perturbation constraints on Z3 and alignment with the probability simplex or admissible measure class.
This construct provides the foundation to develop existence theory for minimizers (including in infinite-dimensional settings under suitable compactness and coercivity assumptions) and to show the convergence of minimizers for the corrupted problem to the true uncorrupted optimal controls via Z4-convergence.
Existence, Optimality, and Convergence
The existence of minimizers for both the original and perturbed Rockafellian problems is established via lower semicontinuity and coercivity in functional-analytic settings, using Mosco and weak-strong Z5-convergence. Notably, the authors:
- Demonstrate that for appropriately constructed corruption maps and penalty terms, the minimizers of perturbed Rockafellian problems converge to the minimizer of the uncorrupted problem as the corruption and relaxation parameters vanish.
- Provide explicit first-order optimality conditions for the smoothed-corrupted Rockafellian, involving adjoints of the control-to-state and quantity-of-interest maps, and generalized subdifferentials with respect to the distribution and support perturbation variables.
Numerical Illustration and Empirical Observations
The efficacy of the Rockafellian framework is demonstrated on high-dimensional, PDE-constrained risk-averse optimal control problems. Two representative cases are computed:
- Example 1: One-dimensional elliptic PDE control with outlier contamination (inflated variance in sampled Z6), solved via a smoothed CVaR objective and alternating minimization across controls, auxiliary variables, and distributional perturbations. The Rockafellian approach consistently recovers the true optimal control even under substantial contamination, as demonstrated by significant reductions in relative Z7 error and selective removal of corrupted samples.
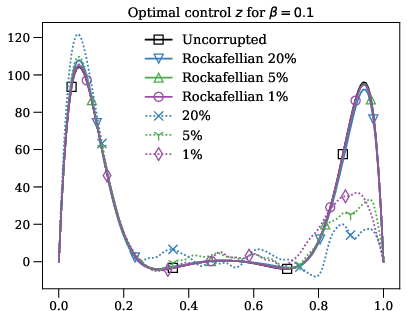
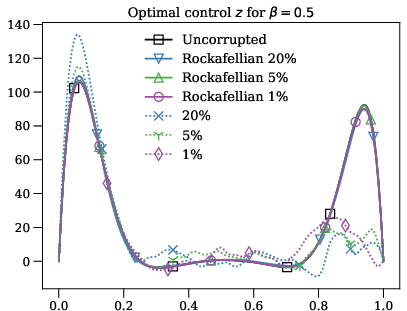
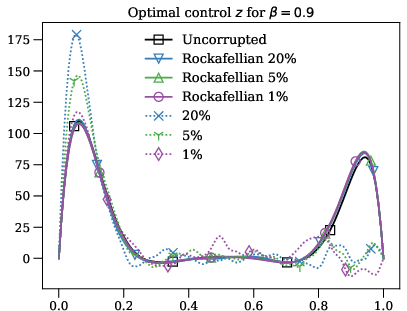
Figure 1: Example 1 — Optimal controls for the true, uncorrupted problem, the corrupted objective, and Rockafellian relaxations at varying corruption levels.
- Example 2: Two-dimensional advection-diffusion PDE control under corruption to the distribution (via heavy-tailed perturbation of Z8). The Rockafellian method robustly identifies controls less influenced by tail events (outliers), with error analyses showing decreased deviation from the true optimal control compared to naive risk-averse approaches at both moderate and high levels of corruption.
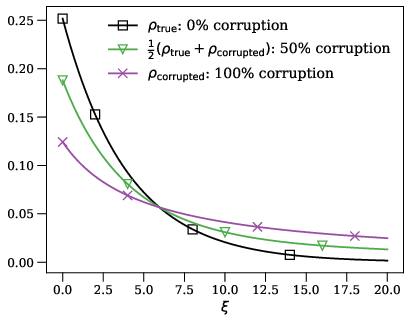
Figure 2: Probability density functions for the random variable Z9 in the advection field U0 for the PDE constraint, illustrating differences between true and corrupted distributions.
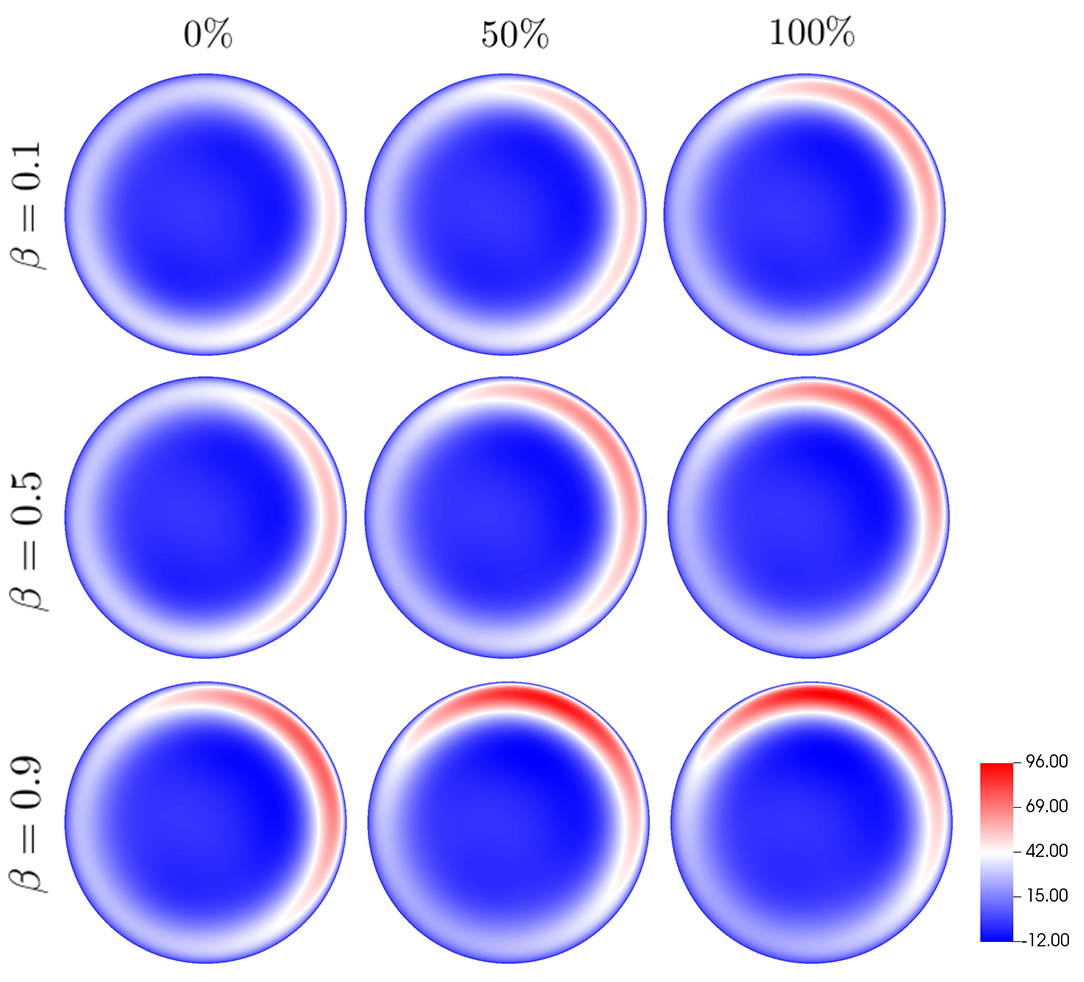
Figure 3: Optimal controls U1 for differing risk-tolerance U2 and corruption regimes, with visual shifts in spatial structure as corruption increases.



Figure 4: For U3: pointwise errors between uncorrupted and corrupted optimal control, and Rockafellian correction at high corruption.



Figure 5: For U4: analogous errors as in Figure 4, highlighting increased effect of Rockafellian correction in higher risk-aversion settings.
Quantitative results throughout indicate that Rockafellian relaxation dramatically reduces out-of-sample error and selectively neutralizes the influence of outliers and adversarial perturbations, while maintaining strong risk-aversion properties for true high-probability scenarios.
Implications and Future Directions
The extension of Rockafellian relaxation to the risk-averse and distributionally ambiguous setting contributes materially to the theory and practice of PDE-constrained stochastic optimization. The developed methodology enables:
- Robustification of optimal control laws against both statistical uncertainty and adversarial, model-driven corruptions without restrictive finite-dimensionality assumptions.
- Interpolation between robust and optimistic paradigms via tunable regularization (e.g., U5), granting fine-grained control over risk sensitivity and reliability.
- Applicability to realistic engineering and scientific domains characterized by high-dimensional state, control, and uncertainty spaces.
Theoretical outcomes (existence, optimality, convergence) are broadly generalizable, while the numerical framework is compatible with standard finite element and optimization pipelines. The approach is amenable to deployment on emerging application tasks such as digital twins, robust machine learning, and design under worst-case-and-opportunistic uncertainty blends.
Potential future avenues include: detailed investigation of bivariate optimization landscape properties induced by Rockafellian perturbations; generalization to state-constrained and nonlinear PDEs; interplay with optimal transport-based DRO; and algorithmic advances for scalable, high-accuracy solution of the relaxed risk-averse programs.
Conclusion
This work rigorously extends risk-averse PDE-constrained optimization to settings with distributional ambiguity and adversarial corruption through the mechanism of Rockafellian relaxation. The proposed framework realizes strong consistency, robustness, and practical recoverability of optimal controls, all substantiated by both abstract analysis and empirical evidence. The interplay of DRO, DOO, and relaxation opens new perspectives for robust decision-making in systems governed by stochastic PDEs and uncertain models.

