- The paper introduces a novel integration of DR-MPC and L1-adaptive control to certify safety under simultaneous epistemic and aleatoric uncertainties.
- It leverages Wasserstein-based ambiguity sets and CVaR reformulations to enforce stringent distributionally robust chance constraints efficiently.
- Experimental results demonstrate a substantial reduction in failure rates, achieving near-zero failures compared to traditional DR-MPC approaches.
L1-Certified Distributionally Robust Planning for Safety-Constrained Adaptive Control
The paper addresses the persistent problem of certifiable safety guarantees for autonomous systems operating in the presence of both epistemic (model) and aleatoric (environment) uncertainties. Existing paradigms, such as classical robust and adaptive control, are limited by high conservatism, while purely data-driven stochastic approaches are prone to fragility under distribution shifts. The core challenge is simultaneously managing uncertainty in both the dynamical model and an external, data-driven environment within the context of Model Predictive Control (MPC) using distributionally robust (DR) mechanisms.
The presented approach integrates Distributionally Robust Model Predictive Control (DR-MPC) with an L1-adaptive control augmentation to enforce strict probabilistic safety requirements—specifically, distributionally robust chance constraints over all admissible probability measures in a Wasserstein ball around the nominal joint system-environment measure.
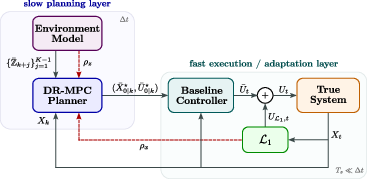
Figure 1: Overview of the framework—DR-MPC planner synthesizes nominal trajectories with safety constraints, rigorously tracked by a baseline controller augmented by L1, which certifies the true state distribution remains in a Wasserstein tube around nominal.
Technical Contributions and Theoretical Foundations
Hierarchical and Bidirectional Architecture
A hierarchically arranged framework is proposed:
- DR-MPC Layer: Generates nominal trajectories considering environment-induced risk via data-driven ambiguity sets, enforcing DR chance constraints (DR-CCs) using Wasserstein balls.
- L1-Adaptive Layer: Provides online, sample-free distributional certificates based on finite-time Wasserstein bounds between true and nominal state distributions, without requiring repeated sampling from the system's evolving stochastic process.
Certifiability hinges on the bidirectional information flow: the DR-MPC passes references to the adaptive controller, which in turn certifies the ambiguity radius relevant for distributional robustness through an online L1-certificate.
Wasserstein-Based Uncertainty Quantification
- System Model Uncertainty: The L1 controller guarantees, for a priori bounded uncertainties, that the true state law resides in a Wasserstein ball around the nominal, with an explicit, computable ρx.
- Environment Uncertainty: The finite-sample Wasserstein deviation ρz for environment model ambiguity is established via concentration inequalities.
- Resulting joint ambiguity set is a Wasserstein ball of radius ρy=ρx+ρz around the nominal law of the system/environment pair.
This additive property—rooted in the independence of uncertainty sources—is central for simultaneous robustness.
- The DR-CC with Wasserstein ambiguity sets is recast exactly as a CVaR constraint using recent duality results.
- This enables efficient, sample-based implementations, decoupled from the geometry of unsafe regions via a generalized distance-to-set representation.
This formulation makes the overall framework computationally tractable for online MPC, requiring only Monte Carlo samples from the nominal dynamics and environment distribution.
Experimental Validation and Numerical Results
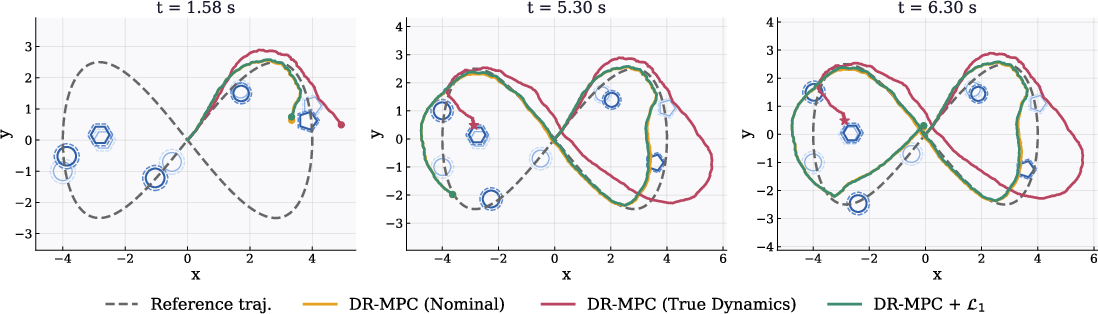
The framework is validated through extensive simulations involving a planar robot operating amidst dynamic, stochastic obstacles with significant modeled/non-modeled uncertainty (matched nonlinearities in the control channel).
Baselines:
- DR-MPC (Nominal): Standard DR planner uses only nominal dynamics.
- DR-MPC (True Dynamics): DR planner applied directly to the uncertain system, without adaptive augmentation.
- DR-MPC + L1 (Proposed): Full hierarchical pipeline.
Findings:
Practical and Theoretical Implications
Stagewise Certified Robustness:
The integration of physical-model-based L15 adaptation enables robust, sample-free certification of dynamic distributional safety, bridging the gap between robust control and statistical learning.
Generality and Geometry-Agnosticism:
The CVaR-based reformulation and the explicit distance-to-set approach render the method agnostic to the geometry of unsafe regions; the pipeline is directly extensible to high-dimensional, multi-agent, and more complex environments.
Limitations and Open Problems:
- The theoretical guarantees are stagewise (per planning step), and recursive feasibility is not addressed. Achieving time-consistent safety would necessitate terminal set ingredients for robust invariance.
- Extensions to fully nonlinear (non-matched) uncertain dynamics remain open.
- Tighter ambiguity sets (beyond the additive structure) are possible when independence is relaxed or additional structure is exploited.
Conclusion
This work introduces a hierarchical control architecture synthesizing DR-MPC and L16-adaptive control for certifiable stochastic safety under simultaneous model and environment uncertainty. The core innovation is the online, sample-free certification of the system-side Wasserstein ambiguity radius, closing the loop between adaptation and planning with explicit distributional guarantees. The approach is substantiated both theoretically and numerically, illustrating robust, high-reliability closed-loop performance in adversarial, uncertain settings.
Future directions encompass recursive feasibility for DR-MPC, nonlinearity, and scaling to multi-agent autonomous systems.