- The paper introduces a framework leveraging event cameras to overcome traditional sensor limitations in extreme lighting for precise 3D deformation measurement.
- The methodology employs dynamic LED marker extraction and Kruppa-based self-calibration to achieve subpixel reprojection accuracy and robust multi-view reconstruction.
- Experimental validation shows reprojection errors below 0.3 pixels and relative measurement errors under 0.88%, underscoring its potential for real-world structural monitoring.
Introduction and Motivation
The paper "Event-Based Method for High-Speed 3D Deformation Measurement under Extreme Illumination Conditions" (2603.28159) introduces an integrated methodology leveraging a multi-event camera array for 3D deformation measurement of engineering structures subjected to high-speed dynamic loading in environments with severe illumination variability. Traditional CMOS/CCD systems are constrained by low dynamic range and high latency, frequently resulting in measurement loss under overexposure or fast-moving marker occlusion. The deployment of event cameras, which offer high dynamic range (up to 140 dB) and microsecond-scale temporal resolution, addresses these challenges by asynchronously responding to scene luminance changes, thus enabling robust sensing in field-based photogrammetric tasks.
Methodological Contributions
The paper proposes a unified framework encompassing marker extraction, system calibration, and deformation measurement specifically tailored to the asynchronous, high-dynamic-range nature of event camera data.
Marker Extraction with Spatiotemporal Correlation:
LED markers, designed with adjustable blinking frequency, stimulate temporally dense event clouds for both calibration and deformation measurement. Extraction of marker centroids relies on modeling spatiotemporal event clusters as Gaussian distributions, with centroids estimated through event accumulation, adapting the time window size dynamically as a function of marker blinking frequency and velocity. Precise matching of marker centers across cameras is realized using temporal correlation criteria with sub-microsecond thresholding for synchronized multi-view correspondence.
Fast Self-Calibration via Kruppa-Based Optimization:
The calibration pipeline leverages sparse reconstruction by decomposing a measurement matrix—composed of multi-camera event-based correspondences—via SVD, followed by rank-4 correction to ameliorate noise contamination. The intrinsic calibration refines parameters by solving Kruppa's equations, which exploit fundamental matrix constraints between camera pairs, reducing internal parameter recovery to the estimation of the effective focal length. Outliers are purged by RANSAC-enabled robust epipolar geometry checks and reprojection error filtering. This process is iterated in conjunction with bundle adjustment to minimize geometric consistency errors.
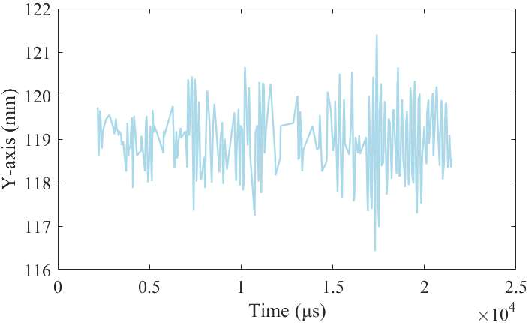
Figure 2: Reference coordinate system transformation clarifies the relationship among world and camera coordinate frames for robust multi-view geometry.
Unified 3D Reconstruction and Deformation Measurement:
After self-calibration, all extrinsics are referenced to a selected camera frame. 3D marker coordinates are reconstructed by intersecting back-projected rays from synchronous event clusters across the camera ensemble. The dynamic marker extraction settings are adapted during operation to accommodate higher movement speeds and distinguish structural movement-induced events from the marker's own blinking-induced events.
Experimental Validation
Calibration and Reprojection Performance:
The calibration employs a blinking LED marker traversing the field of view. With three synchronized event cameras (Prophete EVK4s with 1280 × 720 resolution and 12 mm lenses), the method achieves mean reprojection errors below 0.3 pixels across all cameras, confirmed by Figure 3.
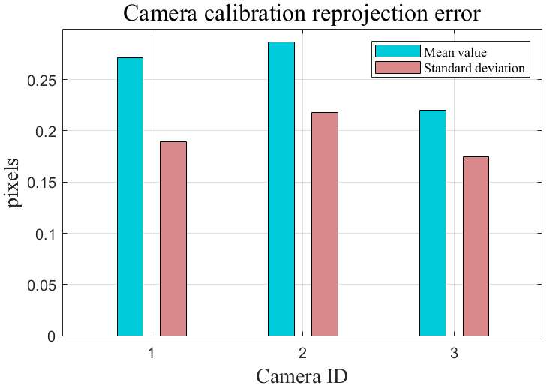
Figure 4: Mean and standard deviation of reprojection error for each calibrated event camera, demonstrating subpixel accuracy.
Figure 5 visualizes the inlier marker 3D reconstructions and camera poses, confirming spatial configuration fidelity.
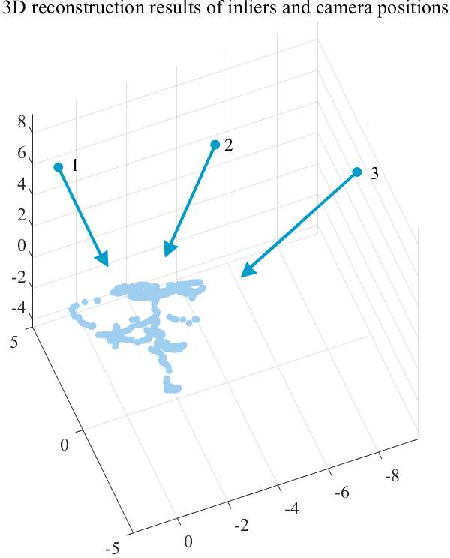
Figure 1: 3D reconstruction of inlier markers in the calibrated coordinate frame alongside camera positions and axes.
Physical checkerboard experiments, scaled using a measured camera baseline, indicate maximum relative errors of <0.88% for 200 mm distances, with accuracy improving on longer baselines. These results substantiate the calibration's reliability.
Figure 7: Actual measurement of corner-to-corner distances on a checkerboard for calibration accuracy assessment.
Robustness under Extreme Illumination:
A comparative imaging trial demonstrates the method's resilience: optical cameras are rendered ineffective due to overexposure, while event cameras maintain clear marker imaging.
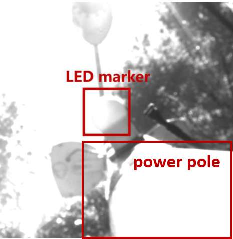
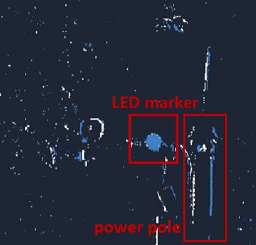
Figure 3: Under extreme illumination, only the event camera yields an unambiguous marker trace in the accumulated event frame.
Dynamic Deformation Measurement:
Distance measurements with dual markers at a fixed 1 m separation yield a relative error of 0.08%. Application to a tower structure under mechanical oscillation records 3D deformation trajectories with an 18.2 mm maximum amplitude, resolved along all axes as shown in Figure 9.
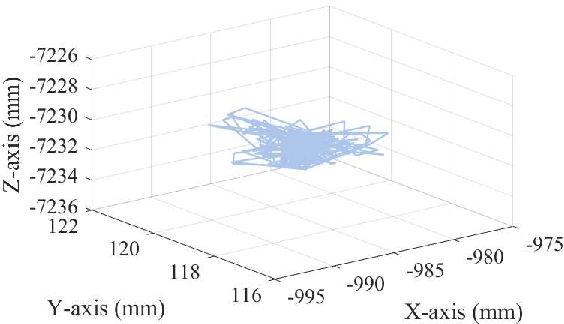
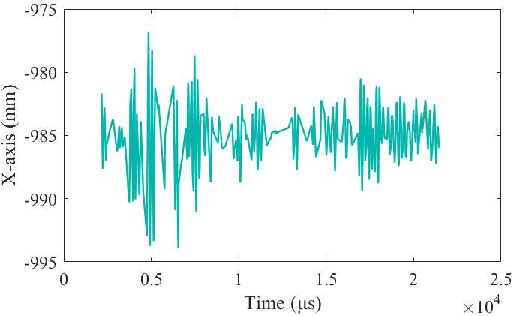
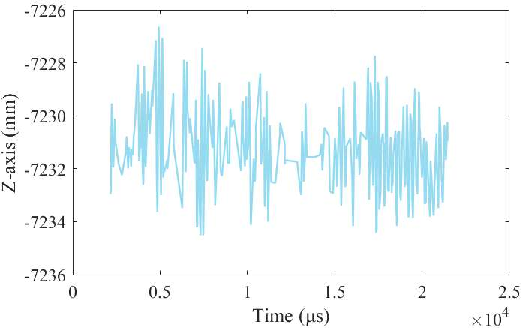
Figure 5: High-speed 3D deformation measurement of a vibrating structure, decomposed into spatial axes.
Implications and Future Directions
This work establishes a reproducible protocol for field-deployable, high-speed 3D deformation monitoring in illumination regimes far beyond the limits of conventional imaging solutions. Notably, the self-calibration approach reduces dependence on elaborate calibration objects, and the use of blinking markers circumvents ambiguities pervasive in background clutter or specular highlights.
Nevertheless, an inherent limitation is that metric scale is not observable from self-calibration alone—an absolute reference (e.g., measured baseline) remains necessary for real-world deployment if metric accuracy is essential. Extensions to larger arrays or markerless approaches could further relax operational constraints, while integration with inertial sensing may resolve scale ambiguities and further improve robustness.
The paradigm outlined suggests substantive implications for real-time monitoring of critical infrastructure (e.g., bridges, towers, aerospace frames), structural health diagnostics, and in-situ validation of high-fidelity finite element models under operational loads. Advances in event-based SLAM and multi-sensor fusion may further benefit from these calibration and reconstruction strategies.
Conclusion
The presented event-based measurement framework successfully exploits the exceptional dynamic range and low-latency characteristics of asynchronous vision sensors to enable high-speed, accurate 3D deformation measurement in environments with severe illumination variations. The framework’s calibration and marker extraction innovations, validated both numerically and operationally, demonstrate potential for scalable, real-world structural monitoring under previously prohibitive field conditions.
(2603.28159)