AutoWeather4D: Autonomous Driving Video Weather Conversion via G-Buffer Dual-Pass Editing
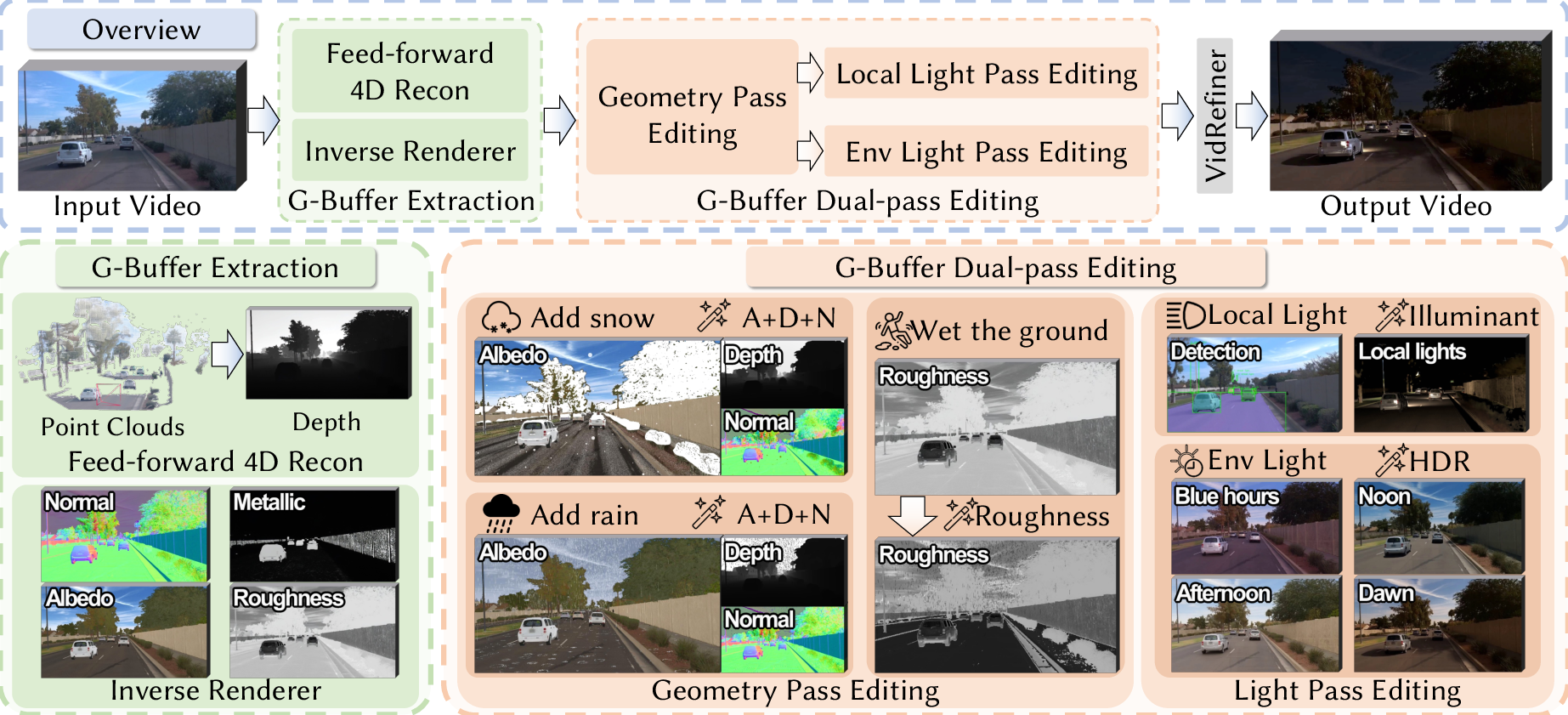
Abstract: Generative video models have significantly advanced the photorealistic synthesis of adverse weather for autonomous driving; however, they consistently demand massive datasets to learn rare weather scenarios. While 3D-aware editing methods alleviate these data constraints by augmenting existing video footage, they are fundamentally bottlenecked by costly per-scene optimization and suffer from inherent geometric and illumination entanglement. In this work, we introduce AutoWeather4D, a feed-forward 3D-aware weather editing framework designed to explicitly decouple geometry and illumination. At the core of our approach is a G-buffer Dual-pass Editing mechanism. The Geometry Pass leverages explicit structural foundations to enable surface-anchored physical interactions, while the Light Pass analytically resolves light transport, accumulating the contributions of local illuminants into the global illumination to enable dynamic 3D local relighting. Extensive experiments demonstrate that AutoWeather4D achieves comparable photorealism and structural consistency to generative baselines while enabling fine-grained parametric physical control, serving as a practical data engine for autonomous driving.


Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
AutoWeather4D: Simple Explanation for a 14‑Year‑Old
What is this paper about?
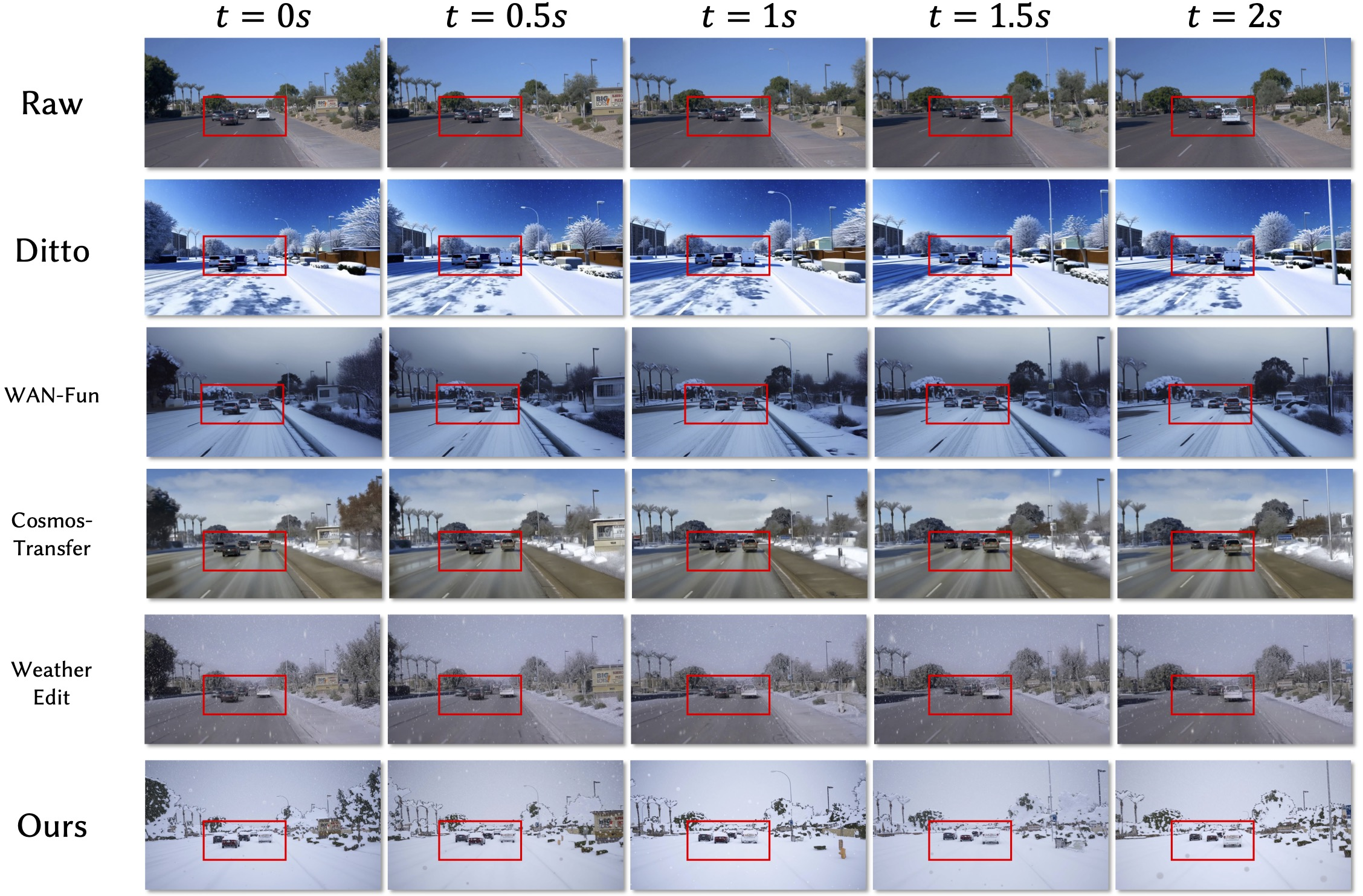
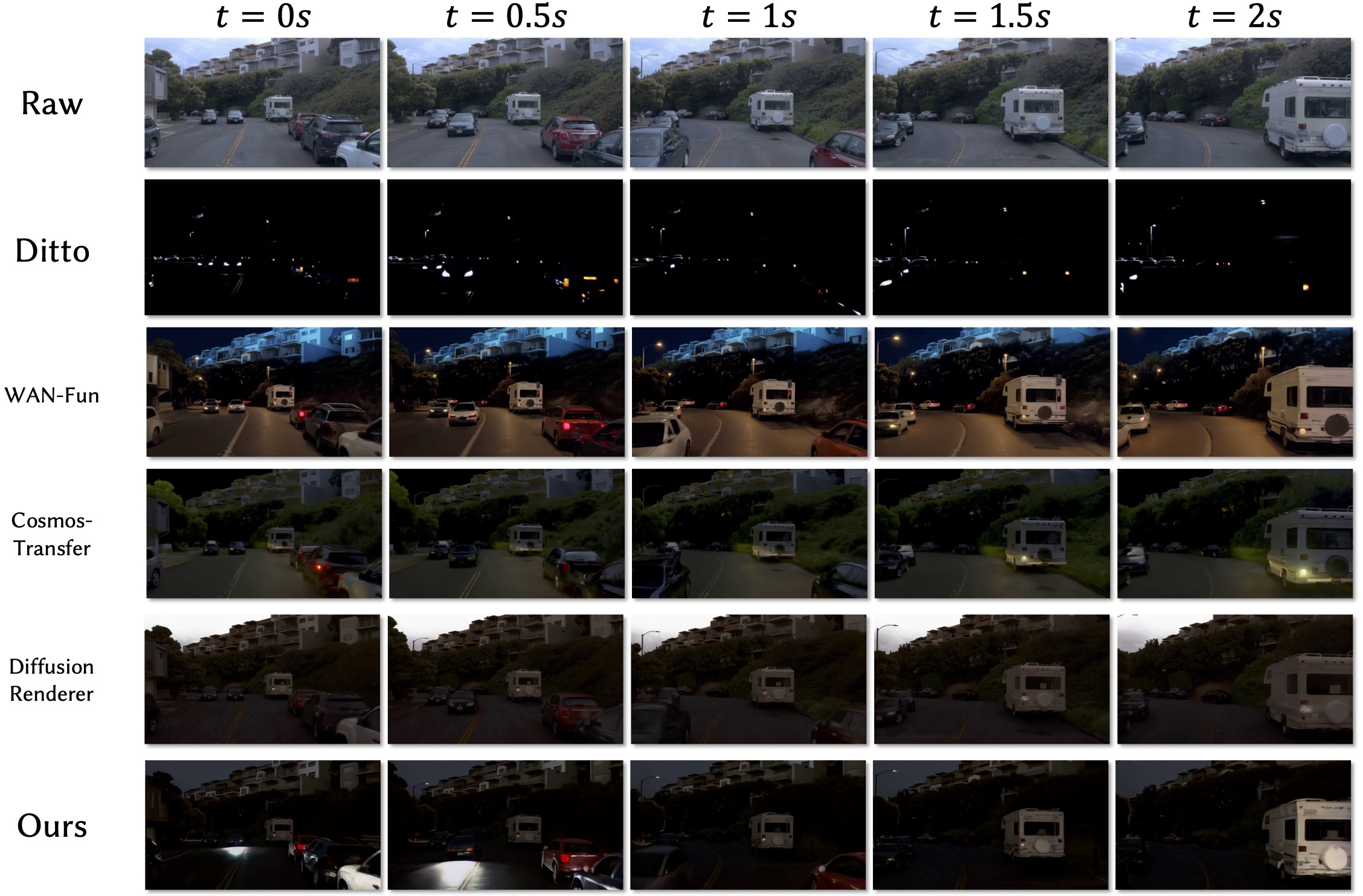
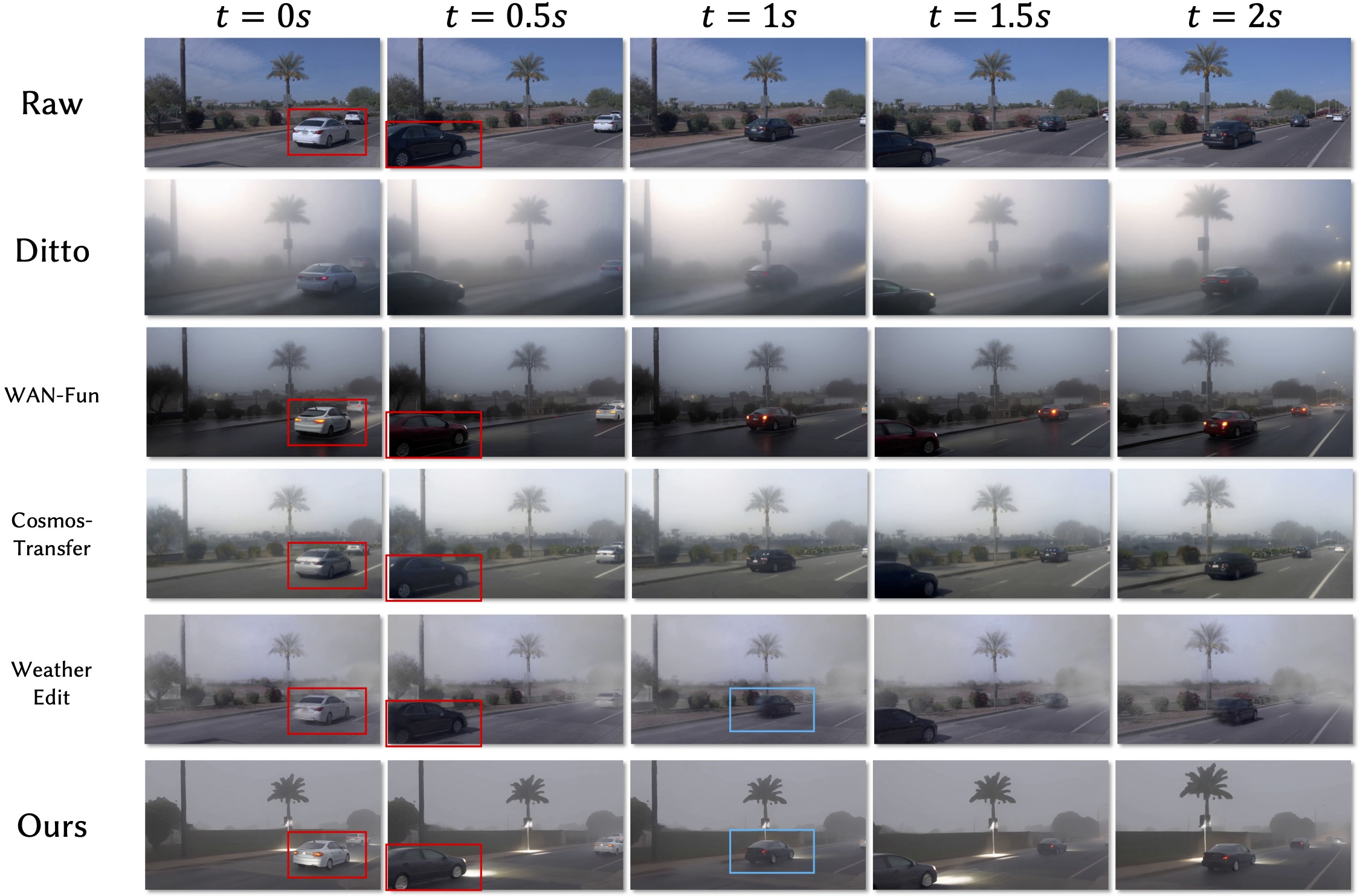
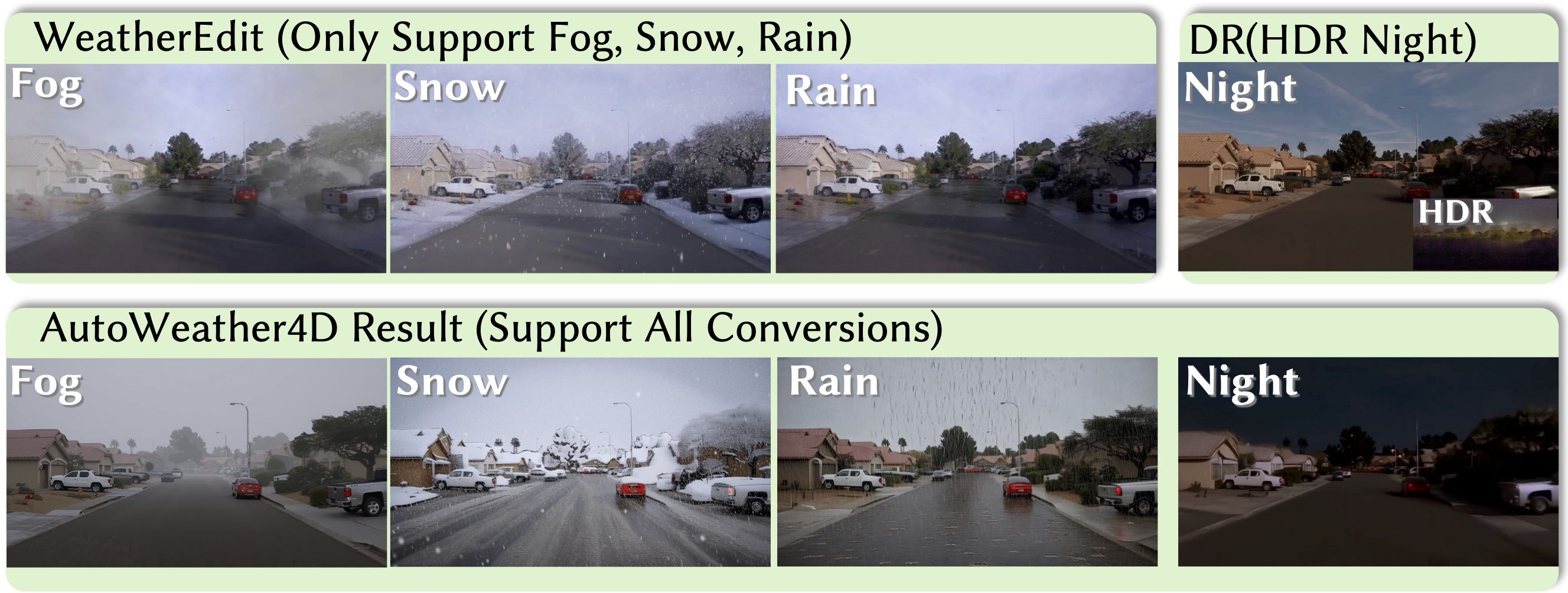
This paper introduces AutoWeather4D, a tool that can change the weather and time of day in driving videos. For example, it can turn a sunny afternoon into a rainy night with headlights and wet roads, or add fog or snow—while keeping everything in the scene (cars, roads, buildings, people) in the right place and moving smoothly. This helps researchers create training and testing videos for self-driving cars without having to film in every possible weather.
What questions are the researchers trying to answer?
The team focuses on four main goals:
- Can we edit driving videos to add rain, fog, snow, or night-time lighting quickly, without rebuilding a 3D model for each video?
- Can we keep “what things are and where they are” (the geometry) separate from “how they look under light” (the illumination) so the results look more realistic?
- Can we handle moving scenes (cars, pedestrians) rather than just still, static scenes?
- Can we give users precise controls, like “how heavy is the rain,” “which streetlights are on,” or “how dense is the fog”?
How does AutoWeather4D work? (With simple analogies)
Think of editing a video like making a movie scene:
- First, you build the set (the shapes and surfaces).
- Then, you add props like snow or puddles on those surfaces.
- Finally, you place and adjust the lights—like the sun, streetlights, and car headlights—to make everything look right.
AutoWeather4D follows a similar three-part process:
1) Extracting the “G-buffer”: the video’s building blocks
A “G-buffer” is like a bundle of maps that describe each pixel in the video:
- Depth map: how far each pixel is from the camera (like a distance map).
- Normal map: which way the surface is facing (like tiny arrows pointing outwards).
- Material maps: what a surface is made of (color, shininess, roughness, metal vs. paint).
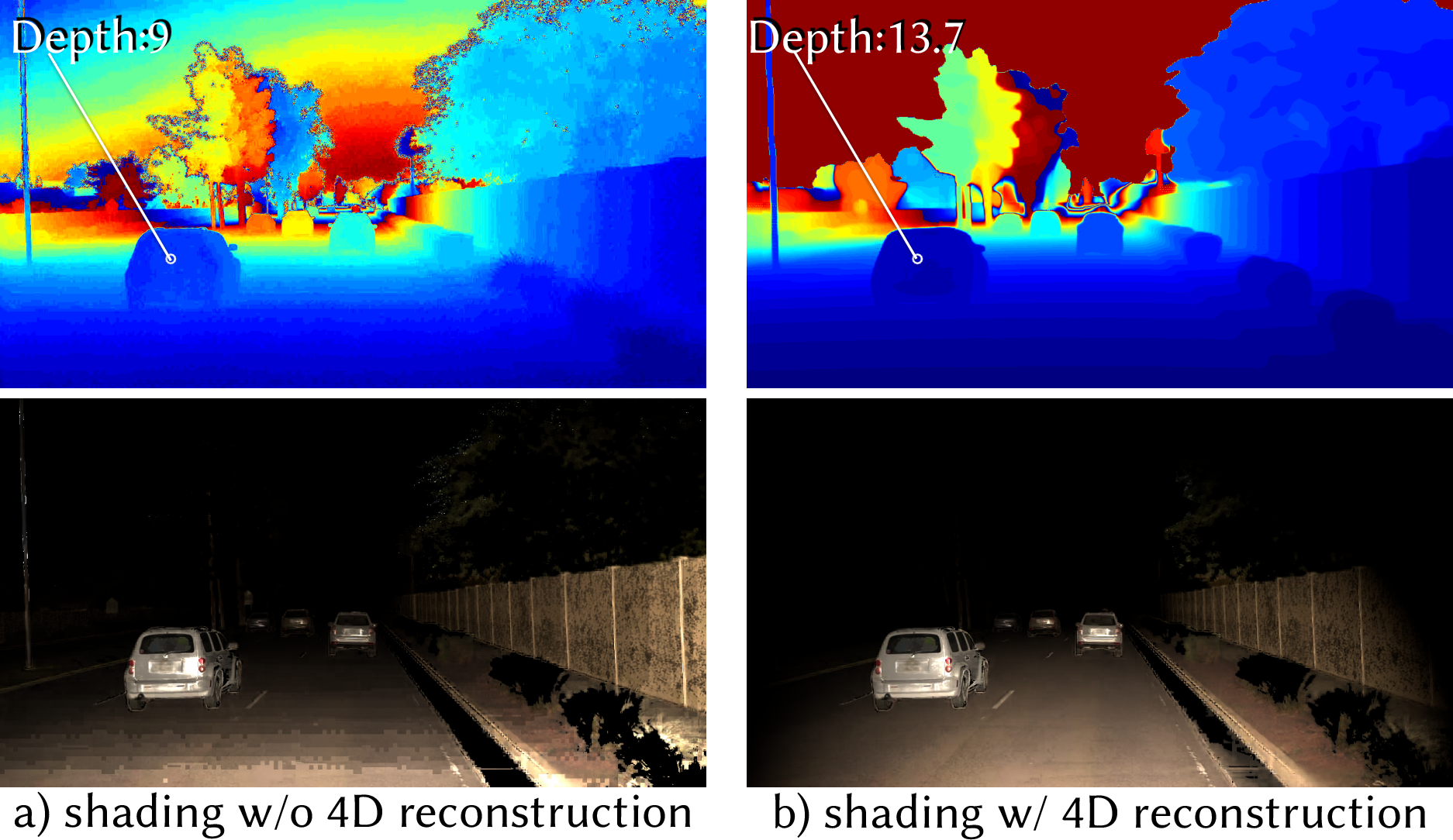
AutoWeather4D uses fast, pre-trained models to estimate these maps for every frame in the video, even when cars and people are moving. It also adjusts the depth to real-world scale using either LiDAR data or simple camera-height rules, so lighting and fog behave physically correctly. It masks the sky so the materials are only estimated where there are actual objects.
2) Dual-Pass Editing: first change the surfaces, then the lights
- Geometry Pass: This is the “set dressing.” The system edits the material maps to add weather effects that sit on surfaces:
- Snow: adds build-up on upward-facing areas (like car roofs and sidewalks), makes surfaces brighter or softer where snow covers them, and shows falling flakes.
- Rain: adds falling raindrops (with wind and gravity), puddles and wet roads (darker and shinier), and small ripples.
- Light Pass: This is the “lighting.” The system separately computes:
- Local lights: headlights, streetlights, etc., placed in 3D so they shine correctly on nearby surfaces.
- Global lighting: the overall environment light for dawn, noon, or night.
- Fog: simulates how light scatters in the air so you see halos around lights and faraway things become hazy.
By separating “what the scene is made of” from “how it’s lit,” the tool can make more realistic changes—like turning on specific streetlights or making fog thicker—without messing up the shapes.
3) Final polish with a video “refiner”
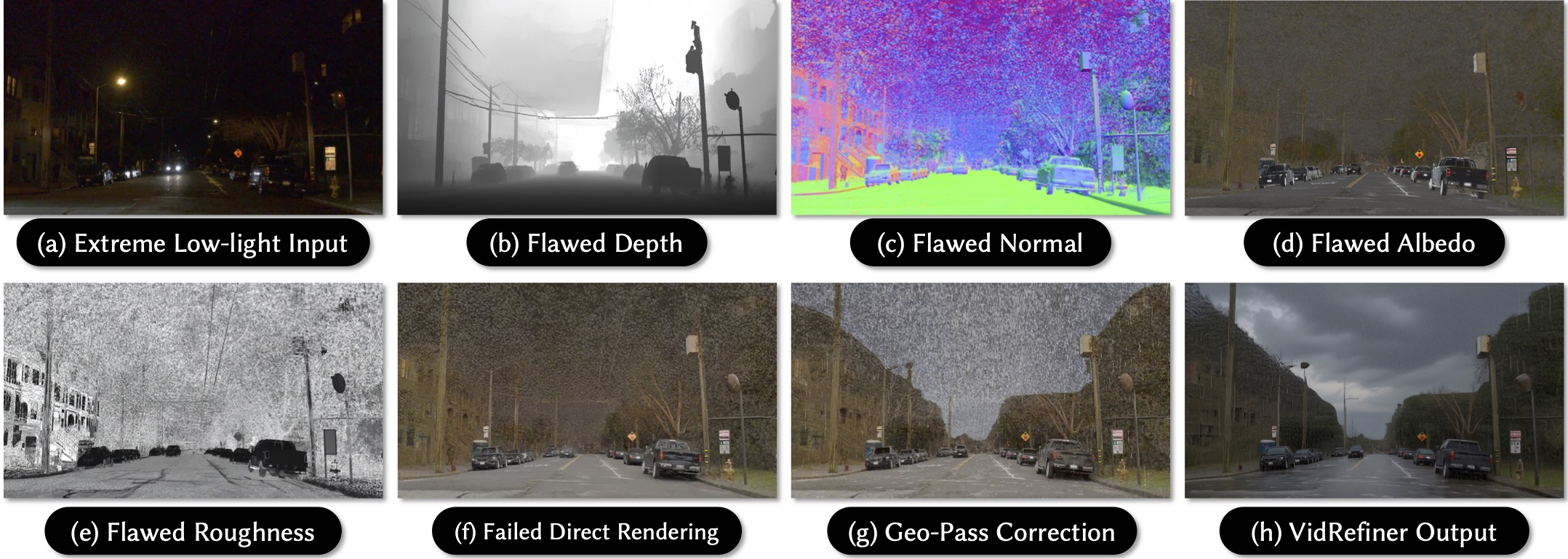
After the physically accurate edit, a lightweight AI “refines” the frames to add camera and sensor details (like slight noise or texture) so the video looks like real footage. Importantly, it’s guided by the earlier steps so it doesn’t hallucinate new objects or change the scene’s structure.
What did they find, and why does it matter?
Here’s what the experiments show:
- Realistic results with control: The tool makes convincing rain, snow, fog, and night scenes, and lets users precisely control things like fog density or which lights are on.
- Works on moving scenes: Because it uses per-frame geometry maps, it handles videos with moving cars and people, not just static scenes.
- Fast and practical: It runs in a “feed-forward” way—meaning it doesn’t need to retrain or optimize for each video—so it’s much faster than older 3D methods.
- Stable structure: It preserves the original shapes and positions of objects better than many generative video editors, so you don’t get weird artifacts like “extra buildings” appearing.
- Helpful for training: When used to create bad-weather videos for training, it slightly improved a segmentation model’s performance on tough datasets—suggesting the edits are realistic enough to be useful for self-driving research.
In a user study, people generally preferred the results from AutoWeather4D over other tools, especially for realism and smoothness over time.
Why is this important?
- For self-driving cars: It’s hard and expensive to record every rare weather situation (like heavy fog at night). This tool can create those scenes from existing videos, making it easier to train and test driving systems.
- For safety testing: Because you can dial up effects (like “more fog” or “only the right-side headlights”), engineers can create very specific, challenging situations to check where systems fail.
- For visual realism: Separating the scene’s geometry from lighting gives more believable results and fine control, like in professional movie production.
Any limitations or future ideas?
The paper notes that extremely complex effects—like the detailed splash when a car drives through a puddle—are still hard to simulate with this approach. In the future, they plan to add more specialized generative components for these messy, fluid-like details, while keeping the strong geometric foundation.
In short: AutoWeather4D is like a smart movie studio for driving videos—first understanding the 3D scene, then adding weather and lights in a physically correct way, and finally polishing the look—so researchers can easily create realistic, controllable bad-weather videos for safer self-driving systems.
Knowledge Gaps
Knowledge Gaps, Limitations, and Open Questions
Below is a concise, actionable list of what remains missing, uncertain, or unexplored in the paper, organized by theme to guide future research.
Scene Representation and G-buffer Extraction
- Robustness of feed-forward G-buffer extraction to severe motion, motion blur, rolling shutter, and highly dynamic scenes is not quantified; failure analysis and uncertainty estimation for depth/normals/albedo are missing.
- Metric depth alignment depends on sparse LiDAR or camera-height priors; the sensitivity of edits to scale errors, sloped roads, or camera height misestimation is not analyzed.
- No assessment of temporal drift in the reconstructed geometry over longer sequences and its impact on illumination continuity and particle occlusion.
- Sky masking is mentioned but not evaluated at failure modes (e.g., thin structures against sky, overexposed horizons); erroneous sky/scene separation effects on relighting remain unstudied.
- Material decomposition (albedo/roughness/metallic) is zero-shot; accuracy, stability under different lighting conditions, and biases versus physically measured BRDFs are not validated.
- Handling of reflective/transparent surfaces (glass facades, mirrors, vehicle windows) and their material estimation fidelity is not addressed.
Physical Weather Modeling
- Rain model lacks drop size distribution, shape deformation (oblate raindrops), and optical scattering characteristics; the visual realism of streak brightness and bokeh under different shutter speeds is unvalidated.
- Standing water and puddle dynamics are procedurally generated; there is no physics-based water accumulation/advection or camera-/vehicle-induced flow; hydroplaning cues and realistic water film thickness are not modeled.
- Vehicle–weather interactions (e.g., splash plumes, wheel spray, tire tracks in snow, snow displacement) are acknowledged as a limitation but remain unmodeled and unquantified.
- Snow accumulation lacks mass conservation and scene-aware deposition under wind/shadowing; consistency of accumulation across time and moving occluders is not demonstrated.
- Mixed or sequential weather transitions (e.g., rain with fog at night, sleet/freezing rain) and their coupled physics are not supported or validated.
- Camera-facing weather effects (raindrops on lens/windshield, wiper streaks, icing) are not simulated, limiting realism for ego-view data.
Illumination and Relighting
- Local light modeling is simplified to 3D spotlights; soft shadows, penumbrae, occluders, beam patterns (e.g., automotive cutoff), interreflections, and caustics (e.g., in puddles) are not supported.
- Fog rendering uses single-scattering RTE; multiple scattering, wavelength/polarization effects, and light–fog color coupling are not modeled, especially critical in dense fog/night.
- “Environment harmonization” blends neural ambient with local lights; energy conservation, consistency with physically-based shading, and artifacts from linear blending are not evaluated.
- Light source detection relies on semantic masks; automatic, robust 3D calibration of light positions/intensities and tracking of moving lights (headlights, flashing beacons) are not validated.
- HDR environment map acquisition/calibration from LDR dashcam video is unspecified; impact of inaccurate environment maps on relighting fidelity remains unclear.
Refinement and Generative Components
- The VidRefiner’s ability to preserve structural edits under diverse conditions is not stress-tested; quantified “structure preservation” beyond selected metrics is missing.
- Failure modes where the refiner hallucinates or erodes physically-resolved effects (e.g., removing snow ripples, altering lighting) are not characterized; no control over trade-off between fidelity and realism is provided.
- The approach lacks uncertainty-aware refinement (e.g., adaptively reducing diffusion strength in regions with high geometric confidence).
Temporal Consistency and 4D Coherence
- Objective temporal metrics (e.g., warping error, tOF, tLPIPS) are not reported; reliance on a small user study leaves open questions about flicker and long-horizon stability.
- Consistency of weather particles and volumetric effects across occlusions, cuts, and large ego-motion is not quantitatively analyzed.
Evaluation Methodology
- Physical accuracy validation is absent (e.g., comparing rendered radiance/BRDF responses, light decay, or fog attenuation against measured ground truth).
- Structural consistency metric uses a monocular 3D detector post-editing; this confounds structural fidelity with detector robustness under altered illumination, potentially penalizing physically correct edits.
- Limited ablations: only a reconstruction ablation is reported; effects of each geometry/light submodule, parameter ranges, and refiner conditioning strength are not systematically evaluated.
- User study details (inter-rater reliability, stratification by weather intensity and scene type) are not reported; sample size of raters is small.
Efficiency, Scalability, and Deployment
- Runtime and memory scaling with resolution, sequence length, and number of local lights is not characterized; suitability for near-real-time use or large-scale data engines remains unclear.
- Generalization across sensors (different FOVs, fisheye, stereo/surround multi-camera rigs, varying exposure/white balance pipelines) is not studied.
- Robustness to hardware constraints (edge devices vs. data center GPUs) and reproducibility of results across different GPU types is not reported.
Sensor and Radiometric Realism
- Radiometric calibration (camera response curve, tone mapping, auto-exposure/white balance) is not modeled; VidRefiner “sensor nuances” are not quantitatively matched to specific camera models.
- Multi-sensor consistency (e.g., synchronized LiDAR/radar) after visual-only editing is unaddressed; cross-modal mismatches may hinder downstream training.
- Nighttime artifacts such as glare, lens flare, diffraction spikes, and sensor blooming are not modeled.
Downstream and Closed-Loop Impact
- Closed-loop evaluation with an autonomy stack (perception-planning-control) is not conducted; impact on behavior and robustness in simulation remains unknown.
- Data augmentation gains are modest and not broken down by class/weather/time-of-day; no analysis of which edits most help which failure modes.
- No targeted generation protocol that maps from known perception failure cases to required controllable parameters is provided (e.g., fog density bins that cause lidar degradation).
Controllability, Parameter Estimation, and Automation
- Automatic estimation of weather/lighting parameters from a target reference (or from real scenes) is missing; users must manually set many controls.
- Lack of semantic-aware attenuation masks in the current system (mentioned as future work) limits selective editing in regions of interest (e.g., pedestrian crosswalks).
- No mechanism to bound or validate parameter ranges to remain within physically plausible regimes (e.g., preventing nonphysical material/light combinations).
Reproducibility and Resources
- Many critical implementation details (semantic annotation pipeline, light source detection specifics, environment map sourcing) are deferred to supplementary; end-to-end replicability is uncertain.
- The claim of being open-source is stated in a comparison table, but the public availability of code, pretrained models, and standardized configs for reproducible benchmarking is not confirmed.
These gaps suggest concrete directions: improve physically-based models (multi-scattering fog, fluid/splash dynamics), add uncertainty-aware G-buffer extraction and refinement, develop robust light source calibration and environment map recovery, introduce objective temporal and physical accuracy metrics, validate across sensors and in closed-loop AV stacks, and automate parameter estimation and semantic-aware control.
Practical Applications
Below is a concise mapping from the paper’s contributions to real-world, practical uses. Each item names concrete use cases, sectors, possible tools or workflows, and key dependencies that may affect feasibility.
Immediate Applications
These can be deployed with today’s capabilities (minutes-per-clip processing on a single modern GPU as reported).
- Autonomous driving data augmentation for perception models
- Sector(s): Automotive, Robotics, Software (ML/AI)
- Use cases: Expand training sets for segmentation, detection, depth, and multi-task perception by sweeping fog density, rain intensity, snow accumulation, and time-of-day; curate targeted corner cases where perception fails (e.g., night glare on wet roads).
- Tools/products/workflows: Integrate AutoWeather4D as a data engine in MLOps pipelines; parameter-swept generation scripts; plug-ins for dataset managers (e.g., CVAT-compatible label transfer); CI jobs that regenerate weather-varied versions of new driving logs.
- Assumptions/dependencies: Requires video input and either LiDAR for metric scaling or reliable camera-height priors; performance depends on quality of feed-forward 4D reconstruction and inverse rendering; labels transfer best for geometry-preserving edits.
- Scenario-based verification and validation (V&V) libraries for AD/ADAS
- Sector(s): Automotive, Safety/Compliance, Software Testing
- Use cases: Build weather- and illumination-stratified scenario banks for SOTIF/ISO 21448 and NCAP-aligned testing; systematically vary local light positions and intensities to test shadow handling and glare robustness.
- Tools/products/workflows: Test scenario pack generator; coverage dashboards that track metrics vs. weather/time-of-day parameters; integration with CARLA/Unreal or log-replay harnesses for perception stack regression tests.
- Assumptions/dependencies: Local light estimation uses semantic masks; extreme hydrodynamics not modeled; closed-loop vehicle dynamics not included (perception-only emphasis).
- Incident replay under adverse conditions for safety analysis and driver coaching
- Sector(s): Fleet Operations, Insurance, Telematics
- Use cases: Re-render dashcam incidents with varied fog/rain/night to assess “what-if” visibility and signage/obstacle legibility; produce training clips for coach-led interventions.
- Tools/products/workflows: Fleet analytics dashboards with on-demand weather/time-of-day toggles; claims review workbench plugins.
- Assumptions/dependencies: Produces photoreal camera outputs only; does not alter the physics of vehicle motion or other agents.
- Streetlight and headlight relighting studies from real footage
- Sector(s): Mobility, Smart Cities, Automotive Lighting
- Use cases: Evaluate glare, shadow coverage, and puddle reflections by adding/tuning local lights (headlights, streetlamps) and simulating fog halos; assess lane marking/sign visibility at dusk/night.
- Tools/products/workflows: Relighting analysis tool using the Light Pass (Cook–Torrance BRDF, HDR environment maps); parameter sweep reports for luminaire specs and placements.
- Assumptions/dependencies: Light-source localization accuracy depends on semantics and depth; outputs are image-based evaluations, not photometrically certified measurements.
- Post-production “day-to-night” and weather conversion for driving footage
- Sector(s): Media/Entertainment, Marketing, Education
- Use cases: Rapidly convert captured driving scenes to night, fog, rain, or snow for films, commercials, or instructional content without re-shoots.
- Tools/products/workflows: Plug-ins or scripts for NLE/VFX suites (e.g., After Effects, DaVinci Resolve) that call AutoWeather4D; parameter presets for “blue hour,” “heavy fog,” “light rain.”
- Assumptions/dependencies: Optimized for forward-driving scenes; relighting fidelity bound by material/depth estimation quality.
- Benchmarking and curriculum materials for graphics + vision courses
- Sector(s): Academia (Education/Research)
- Use cases: Assignments and labs on inverse rendering, BRDF-based relighting, and physically grounded video editing; reproducible experiments for 3D-aware video editing.
- Tools/products/workflows: Teaching kits with prepared Waymo-like clips, parameter configs, and evaluation scripts (CLIP, IoU, identity stability).
- Assumptions/dependencies: Access to a GPU; curated datasets with consent/licensing for educational redistribution.
- Rapid A/B evaluation of perception model robustness vs. controlled weather parameters
- Sector(s): Automotive, Software (ML/AI)
- Use cases: Generate response curves for detection/segmentation/3D estimation vs. fog density, rain rate, headlight intensity, or sun altitude; identify breakpoints for safe-operation envelopes.
- Tools/products/workflows: Batch generators with parameter sweeps; automated scoring pipelines linked to model registries.
- Assumptions/dependencies: Requires consistent scenario IDs and metadata management to compare across runs.
- Synthetic augmentation for HD map QA and asset legibility
- Sector(s): Mapping, Smart Cities, Automotive
- Use cases: Validate how lane markings, curb lines, and traffic signs render under night and wet conditions; prioritize maintenance or recoloring based on visibility drop-offs.
- Tools/products/workflows: Map QA portal with video overlays under weather/time-of-day variants; export of annotated frames for human review.
- Assumptions/dependencies: Accuracy degrades if markings are occluded or under severe fog; results remain pixel-level camera assessments.
- Content creation for road-safety education and public awareness
- Sector(s): Public Sector, NGOs, Education
- Use cases: Produce realistic clips showing safety risks (e.g., longer stopping distances on wet roads, fog-obscured pedestrians) without staging hazardous shoots.
- Tools/products/workflows: Campaign asset pipeline with adjustable weather presets; guidelines for responsible depiction (non-deceptive edits).
- Assumptions/dependencies: Policy-compliant disclosure of edits; domain remains driving-centric.
- Prototype SDK/API for weather-aware video editing
- Sector(s): Software, Developer Tools
- Use cases: Provide a programmatic interface enabling apps to convert driving videos under parameterized conditions; support batch processing.
- Tools/products/workflows: Python API, REST microservice, or plugin for data labeling tools; preset libraries for common weather/time-of-day profiles.
- Assumptions/dependencies: GPU availability; dependency on pretrained depth/material models (Pi3, DiffusionRenderer).
Long-Term Applications
These require further research, integration, or scaling (e.g., multi-sensor physics, extreme phenomena, certification workflows).
- Closed-loop, multi-sensor world-model simulation for AD development
- Sector(s): Automotive, Simulation, Robotics
- Use cases: Unite camera weather conversion with physically consistent LiDAR/Radar returns under rain/snow/fog; train/test end-to-end planners in adverse conditions.
- Tools/products/workflows: Coupling AutoWeather4D with sensor simulators (e.g., CARLA extensions) and world models for feedback loops; synchronized sensor “degradation” profiles.
- Assumptions/dependencies: Requires physically validated sensor models; alignment of weather-induced attenuation/scattering across modalities.
- Physics-enhanced hydrodynamics (splashes, spray, hydroplaning risk)
- Sector(s): Automotive Safety, Research
- Use cases: Model water-sheeting, wheel spray, and splash interactions that affect visibility and perception; assess hazard zones in heavy rain.
- Tools/products/workflows: Hybrid CFD + video refinement modules; annotated benchmarks for dynamic fluid-vehicle interactions.
- Assumptions/dependencies: Significant compute and physics modeling; robust coupling between deterministic geometry and generative fine details.
- Urban lighting optimization and digital twin planning
- Sector(s): Smart Cities, Infrastructure, Energy
- Use cases: Optimize streetlight placement/intensity to maximize visibility and minimize energy/glare in foggy or wet conditions; test alternative luminaires virtually on real streetscapes.
- Tools/products/workflows: City-scale digital-twin workflows that ingest real corridor footage; parameter search over light layouts using Light Pass outputs as visibility proxies.
- Assumptions/dependencies: Must calibrate outputs against photometric standards; needs scalable citywide data ingestion and governance.
- Regulatory scenario catalogs and virtual homologation under adverse weather
- Sector(s): Policy/Regulation, Automotive
- Use cases: Define standardized, parameterized weather/lighting tests for certification; support virtual homologation where real-world collection is unsafe or rare.
- Tools/products/workflows: Reference scenario repositories with explicit weather parameters; audit trails and traceability for test generation.
- Assumptions/dependencies: Consensus on validity and acceptance criteria; third-party verification of physical plausibility.
- Robustness analytics for insurance risk modeling and pricing
- Sector(s): Finance/Insurance, Fleet Management
- Use cases: Predict claim likelihood shifts under controlled weather-time parameters; run counterfactual analyses for route risk.
- Tools/products/workflows: Model pipelines that fuse weather-varied replay with telematics; risk scoring dashboards.
- Assumptions/dependencies: Must avoid using edited evidence as legal proof; outputs are for modeling/analytics only.
- Assistive training for teleoperation and emergency response in adverse conditions
- Sector(s): Robotics, Public Safety, Logistics
- Use cases: Prepare operators for low-visibility navigation by re-rendering real routes under varied conditions; highlight blind spots and lighting pitfalls.
- Tools/products/workflows: Training simulators with scenario toggles and guided curricula; operator performance analytics.
- Assumptions/dependencies: Human-in-the-loop evaluation quality depends on display/VR fidelity; not a substitute for full physics-based driving simulation.
- Adaptive, scenario-driven perception self-tests on-vehicle
- Sector(s): Automotive, Embedded Systems
- Use cases: Run periodic self-diagnostics by virtually relighting logged scenes to verify model robustness envelopes and trigger recalibration/handover policies.
- Tools/products/workflows: Edge-friendly variants of AutoWeather4D or server-side assessments with OTA reporting; thresholds tied to safety-of-operation.
- Assumptions/dependencies: Compute and power constraints; privacy and data movement policies.
- Cross-domain generalization (non-driving outdoor mobile robots)
- Sector(s): Robotics (Agriculture, Delivery, Inspection)
- Use cases: Adapt the pipeline for sidewalks, farms, or sites to train/test robots under fog/rain/night; evaluate sign/marker visibility in domain-specific settings.
- Tools/products/workflows: Domain-adapted semantic masks and priors; parameter sets aligned with task-relevant illuminants (e.g., work lamps).
- Assumptions/dependencies: Additional training or rules for non-road semantics; different camera placements/heights.
- Human factors studies on visibility and attention in adverse conditions
- Sector(s): Academia, Public Health, Transportation Safety
- Use cases: Run controlled user studies on sign/pedestrian detectability vs. fog/rain/light parameters using real-scene videos; inform UI/UX for driver warnings.
- Tools/products/workflows: Experiment platforms that present parameterized clips and collect response metrics (detection time, error rates).
- Assumptions/dependencies: Ethical approvals; calibrated display environments; videos are proxies, not full immersion.
- Marketplace of weather/time-of-day assets for dataset enrichment
- Sector(s): Software, Data Platforms
- Use cases: Curate licensed libraries of weather-varied driving clips with metadata (fog density, sun altitude, local lights) for researchers and startups.
- Tools/products/workflows: Data catalog with search by parameter ranges; usage analytics and quality gates.
- Assumptions/dependencies: Licensing and privacy compliance; standardization of parameter schemas.
Notes on feasibility across applications:
- Core dependencies: high-quality feed-forward depth and material estimation, metric scaling (LiDAR or camera height), semantic masks for local lights, and a modern GPU.
- Limitations: extreme, high-entropy fluid effects are not yet modeled; outputs are camera-rendered and do not alter physical vehicle dynamics; method is tuned for driving-centric content.
- Validation: for policy and safety-critical uses, third-party calibration and acceptance criteria are required; photometric accuracy may need further validation beyond visually plausible rendering.
Glossary
- 3D Gaussian Splatting (3DGS): A point-based 3D representation that renders scenes using anisotropic Gaussians for efficient, high-quality view synthesis. "Gaussian Splatting methods leverage 3DGS~\cite{kerbl3Dgaussians} for efficient rendering"
- 3D-aware editing: Video or image editing that explicitly models and manipulates scene geometry to maintain spatial consistency across views/frames. "we propose a 3D-aware editing method called AutoWeather4D"
- 4D reconstruction: Estimating a temporally coherent 3D representation across frames (3D + time) from video. "a feed-forward 4D reconstruction backbone"
- AABB (Axis-Aligned Bounding Box): A bounding box aligned with coordinate axes used for efficient overlap tests and metrics. "(AABB projection formulations in Supp. Sec.~\ref{sec:more_quantitative})"
- Albedo: The intrinsic, view-independent base color of a surface used in physically based rendering. "intrinsic material properties (normal , metallic , albedo , roughness )"
- CLIP score: A text-image similarity metric that measures alignment between generated visuals and textual instructions. "Editing Instruction Adherence utilizes the CLIP score~\cite{clipscore}"
- Cook–Torrance BRDF: A physically based reflectance model capturing microfacet specular reflection and roughness-dependent behavior. "Surface radiance is then analytically evaluated using the Cook-Torrance BRDF~\cite{10.1145/357290.357293}"
- Deferred shading: A rendering pipeline that first rasterizes geometry/material buffers and then computes lighting in a later pass. "The synthesized ambient radiance is linearly blended with the local light pass, effectively completing the deferred shading cycle."
- Diffusion-based inverse renderer: An approach that uses diffusion models to decompose images into intrinsic material and geometry components. "intrinsic material properties (albedo, normal, metallic, roughness) are decoupled via a zero-shot diffusion-based inverse renderer~\cite{DiffusionRenderer}"
- Environment map (HDR): A high dynamic range panoramic illumination map used to light scenes with realistic ambient and directional cues. "a neural forward renderer conditioned on an HDR environment map"
- Fractional Brownian Motion (FBM): A procedural noise model with fractal characteristics used to generate natural patterns like puddle masks. "puddle masks generated via Fractional Brownian Motion (FBM)"
- G-buffer: A collection of per-pixel geometric and material attributes (e.g., depth, normals, albedo) used for deferred shading and editing. "our method represents the dynamic scene by the extracted G-buffers of the videos"
- G-buffer Dual-pass Editing: A two-stage editing mechanism that first modifies geometry/materials and then computes lighting for physically grounded results. "At the core of our approach is a G-buffer Dual-pass Editing mechanism."
- Geometry Pass: The stage that updates intrinsic surface properties (e.g., albedo, normals, roughness) to inject weather-related changes. "The Geometry Pass transforms the intrinsic albedo, normal, and roughness to incorporate the physical presence of weather elements."
- Global illumination: The aggregate effect of light transport including indirect lighting and environmental contributions. "accumulating the contributions of local illuminants into the global illumination to enable dynamic 3D local relighting"
- Gunn–Kinzer terminal velocities: Empirical terminal fall speeds of raindrops used to model physically accurate rain streak dynamics. "Falling drops are modeled as kinematic particles governed by a vector summation of GunnâKinzer terminal velocities~\cite{1971JApMe..10..751W}"
- Henyey–Greenstein phase function: A common anisotropic scattering model for participating media that controls forward/backward scattering. "a single-scattering Radiative Transfer Equation (RTE) model equipped with the Henyey-Greenstein phase function~\cite{Henyey1940DiffuseRI}"
- Intersection-over-Union (IoU): A metric that measures overlap between predicted and ground-truth regions or boxes, used here for structural consistency. "Structural Consistency assesses geometric preservation through a bounding-box Intersection-over-Union (IoU) protocol."
- LiDAR: A laser-based depth sensing technology providing accurate 3D point clouds for metric alignment. "aligning the relative depth with sparse LiDAR point clouds"
- Light Pass: The stage that computes scene illumination using edited materials, synthesizing both local lights and environment lighting. "Given the updated G-buffers from the Geometry Pass, the Light Pass computes the final scene illumination."
- Look-Up Table (LUT): A precomputed mapping applied to colors (e.g., to shift color temperature) for consistent stylistic or photometric changes. "a parametric Look-Up Table (LUT) shifts ambient color temperatures toward warm nocturnal tones"
- Metaball: An implicit surface modeling technique where fields from spherical primitives blend to form smooth aggregates (e.g., snow buildup). "Metaball-based Surface Buildup iteratively evaluates an SPH Poly6 kernel"
- Metric depth: Depth values in real-world units (e.g., meters), enabling physically accurate light transport and attenuation. "metric depth via feed-forward 4D reconstruction"
- Metallic (PBR): A material parameter indicating how metallic a surface is, affecting reflectance behavior in PBR shading. "intrinsic material properties (normal , metallic , albedo , roughness )"
- Neural Radiance Field (NeRF): A neural scene representation that models view-dependent radiance and density for novel-view synthesis. "NeRF-based approaches \cite{Li2023ClimateNeRF} embed physical weather models or text-guided editing into neural radiance fields"
- Normal map: A per-pixel encoding of surface orientation used to compute lighting and simulate detail without changing geometry. "over the extracted normal maps"
- Parametric relighting: Systematically controlling lighting conditions via explicit parameters (e.g., positions, intensities, environment maps). "enabling direct parametric relighting"
- Radiative Transfer Equation (RTE): The physical equation describing how light is absorbed, emitted, and scattered through a medium. "We formulate foggy environments by analytically resolving volumetric scattering via a single-scattering Radiative Transfer Equation (RTE) model"
- Relative Depth Alignment: The process of converting relative depth estimates into absolute metric scale using external cues (e.g., LiDAR). "Relative Depth Alignment."
- Roughness (PBR): A material parameter controlling microfacet distribution and specular highlight sharpness in PBR models. "intrinsic material properties (normal , metallic , albedo , roughness )"
- Signed Distance Field (SDF): A scalar field where each point stores the distance to the nearest surface (signed by inside/outside), enabling precise occlusion and intersections. "We parameterize these trajectories as volumetric Signed Distance Fields (SDFs)"
- Single-scattering: An approximation in volumetric rendering where light scatters at most once before reaching the camera. "a single-scattering Radiative Transfer Equation (RTE) model"
- Sky-masking mechanism: A procedure to exclude infinite-depth sky regions from material estimation to prevent artifacts. "we implement a dedicated sky-masking mechanism"
- Smoothed Particle Hydrodynamics (SPH) Poly6 kernel: A smoothing kernel used in particle-based fluid simulations for continuous field estimation. "SPH Poly6 kernel~\cite{10.5555/846276.846298}"
- VidRefiner: The terminal refinement module that adds sensor-like details while preserving physically computed structure and lighting. "the VidRefiner performs terminal refinement on the rendered sequence"
- Volumetric scattering: Light interactions (absorption and scattering) within a participating medium like fog, haze, or smoke. "We formulate foggy environments by analytically resolving volumetric scattering"
- Zero-shot: Applying a model to new tasks or domains without additional training or fine-tuning. "intrinsic material properties (albedo, normal, metallic, roughness) are decoupled via a zero-shot diffusion-based inverse renderer~\cite{DiffusionRenderer}"
Collections
Sign up for free to add this paper to one or more collections.