- The paper introduces a novel construction of exact distance oracles for planar graphs with n^(1+o(1)) preprocessing and O(log^(2+o(1)) n) query time.
- It employs a new trichromatic face location method using binary search on shortest path trees within a recursive r-division framework.
- The approach removes traditional tradeoffs between space, preprocessing, and query time, advancing applications in road networks and dynamic graph updates.
Planar Graph Distances: Oracle Construction with Near-Optimal Complexity
Overview and Main Results
The paper "Distances in Planar Graphs are Almost for Free!" (2603.26313) resolves a longstanding open problem regarding the complexity tradeoffs in constructing exact distance oracles for planar graphs. Specifically, it demonstrates that, up to subpolynomial or polylogarithmic factors, there is no fundamental tradeoff barrier between preprocessing time, space, and query time. For an n-vertex weighted directed planar graph, the authors provide an n1+o(1)-time construction of a compact representation (oracle) of size n1+o(1) supporting exact pairwise distance queries in O(log2+o(1)n) time. This improves upon previous pre-processing times, which were at best n3/2+o(1).
An additional meta-result is a nearly linear-time reduction of the adjacency-based representation to a highly efficient “distance representation,” analogous to what the Fast Fourier Transform achieves for signal processing. These results hold for all distance-oracle designs in the present state-of-the-art, effectively saturating the design space up to minor lower-order terms.
Historical Context and Technical Challenges
Early approaches to planar graph distance oracles exhibited inherent tradeoffs among space, query time, and preprocessing complexity. The standard techniques involved recursive applications of planar separators and r-divisions, typically resulting in O(n5/3) or O(n3/2) space or preprocessing for polylogarithmic query time. The advent of Voronoi diagram–based approaches, inspired by Cabello [Cabello19], introduced more fine-grained space-query tradeoffs but incurred increased preprocessing costs, notably due to the complexity of constructing additively weighted Voronoi diagrams (AWVDs). The recalcitrance of these construction times, especially in the context of recursive decompositions, was the main obstacle to improving preprocessing bounds.
Algorithmic Contributions
The principal algorithmic innovation is a fast and generic method for constructing AWVDs in planar graphs, which are crucial for all recent efficient distance oracles.
New Trichromatic Face Location Procedure
A fundamental ingredient is the reduction of AWVD construction to repeatedly finding (at most) one trichromatic face in planar subgraphs with only three sites (Figure 1).
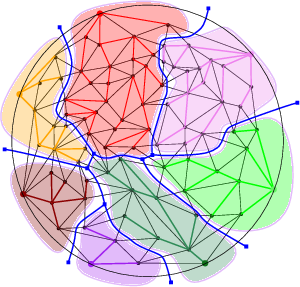
Figure 1: A graph region with the Voronoi diagram (cells shaded), its dual (blue tree), and the locations of trichromatic faces.
All previous fast routines for the trichromatic case (e.g., [CharalampopoulosGM21], [icalp2025planar]) used geometric properties of special graphs (rectilinear grids, undirected graphs with shortest path separators) and required restrictive technical conditions or auxiliary data structures whose recursive instantiation incurred higher total cost.
This paper presents an entirely different procedure for trichromatic face location in general planar graphs, based on new monotonicity properties related to shortest path trees. The approach utilizes binary search over the edge centroids of the respective shortest path trees, exploiting the property that for any edge in the tree, there exist at most two "critical" dual path prefixes that transition away from the current cell (Figure 2).
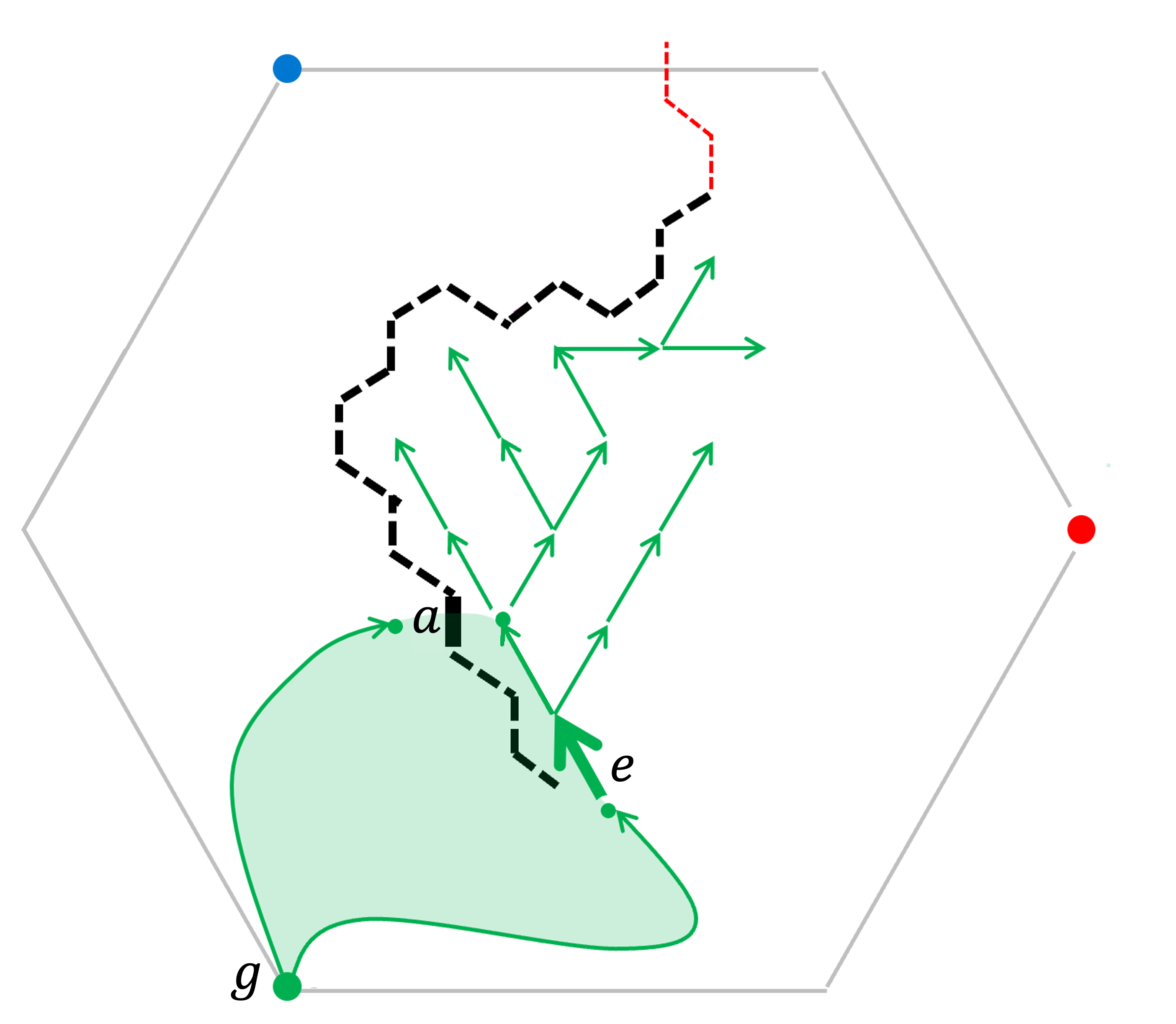
Figure 2: The monotonicity property—the green prefix on the dual path forms a contiguous prefix that terminates at the critical edge.
This leads to a highly efficient tree elimination algorithm: by evaluating the “color transitions” at these critical points—where the dual’s path leaves one Voronoi cell and enters another—the procedure can rapidly discard half the search space and recurse. The correctness and completeness of the procedure are established via cycle-separation arguments (Figure 3), and the running time is logarithmic in the size of the region due to the centroid decomposition and binary search.
Handling Recursive Decompositions
The most technical aspect arises in plugging this approach into the recursive r-division–based oracles (as in [ourJACM]), where the fundamental trees exist at varying granularities, and one cannot directly construct an MSSP for each recursive region due to time constraints. To circumvent this, the authors explicitly manage coarse and fine representations of shortest path trees and their duals (Figure 4 and Figure 5), maintaining cross-level correspondences and supporting on-demand refinements through coarse-to-fine linking.
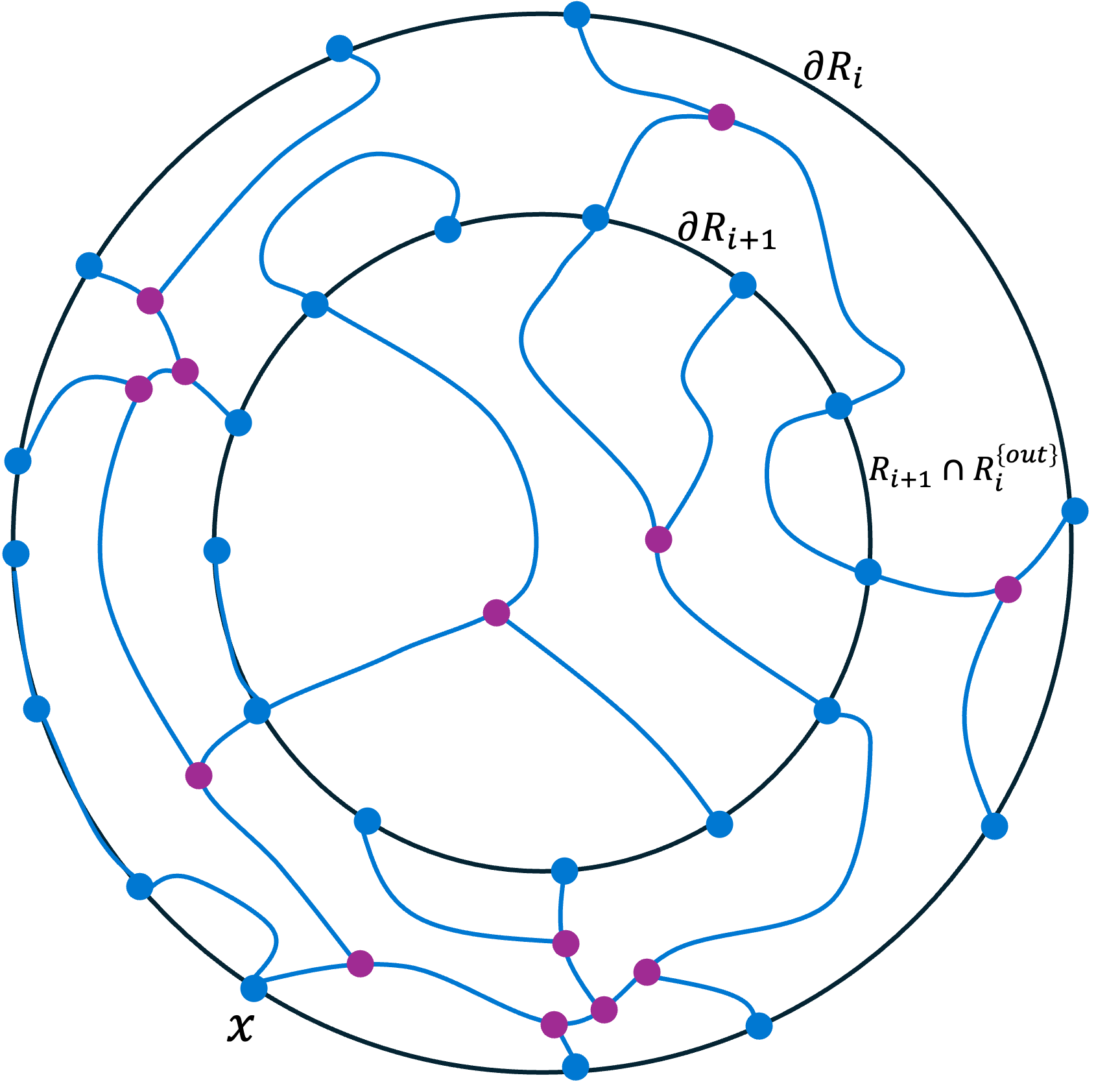
Figure 4: Primal coarse shortest path tree for a source on a region boundary; only contracted edges between key boundary sets are retained.
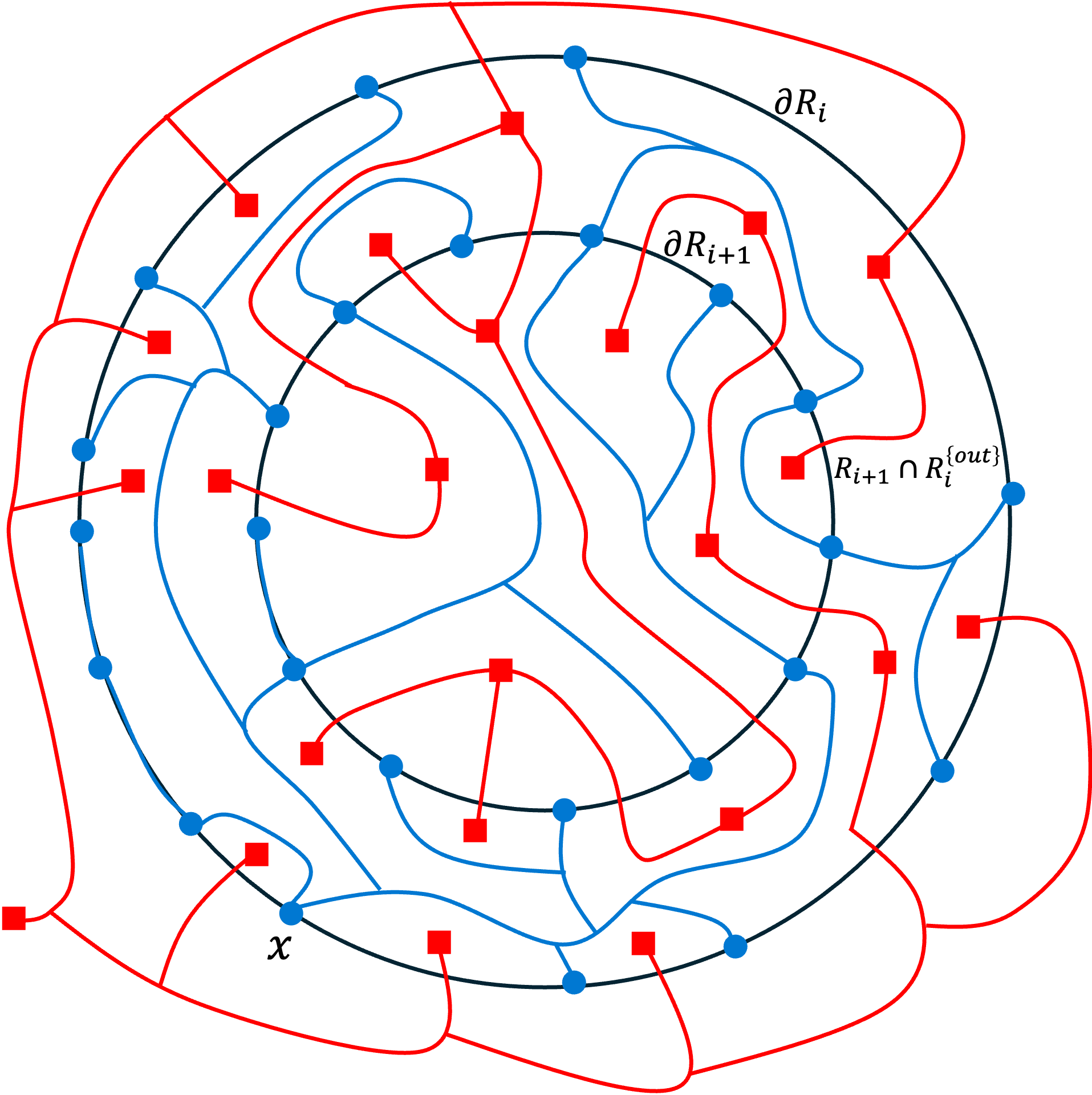
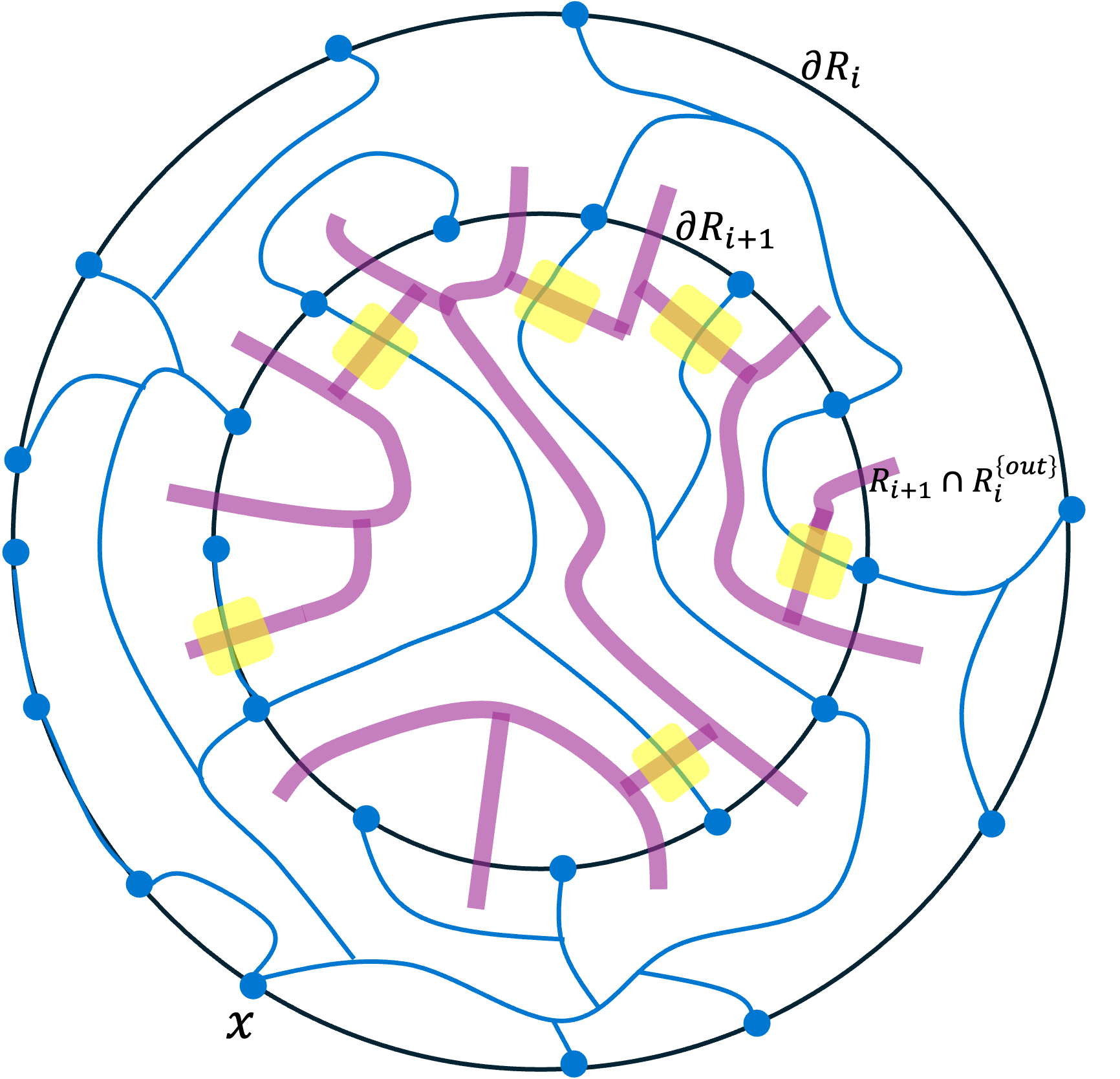
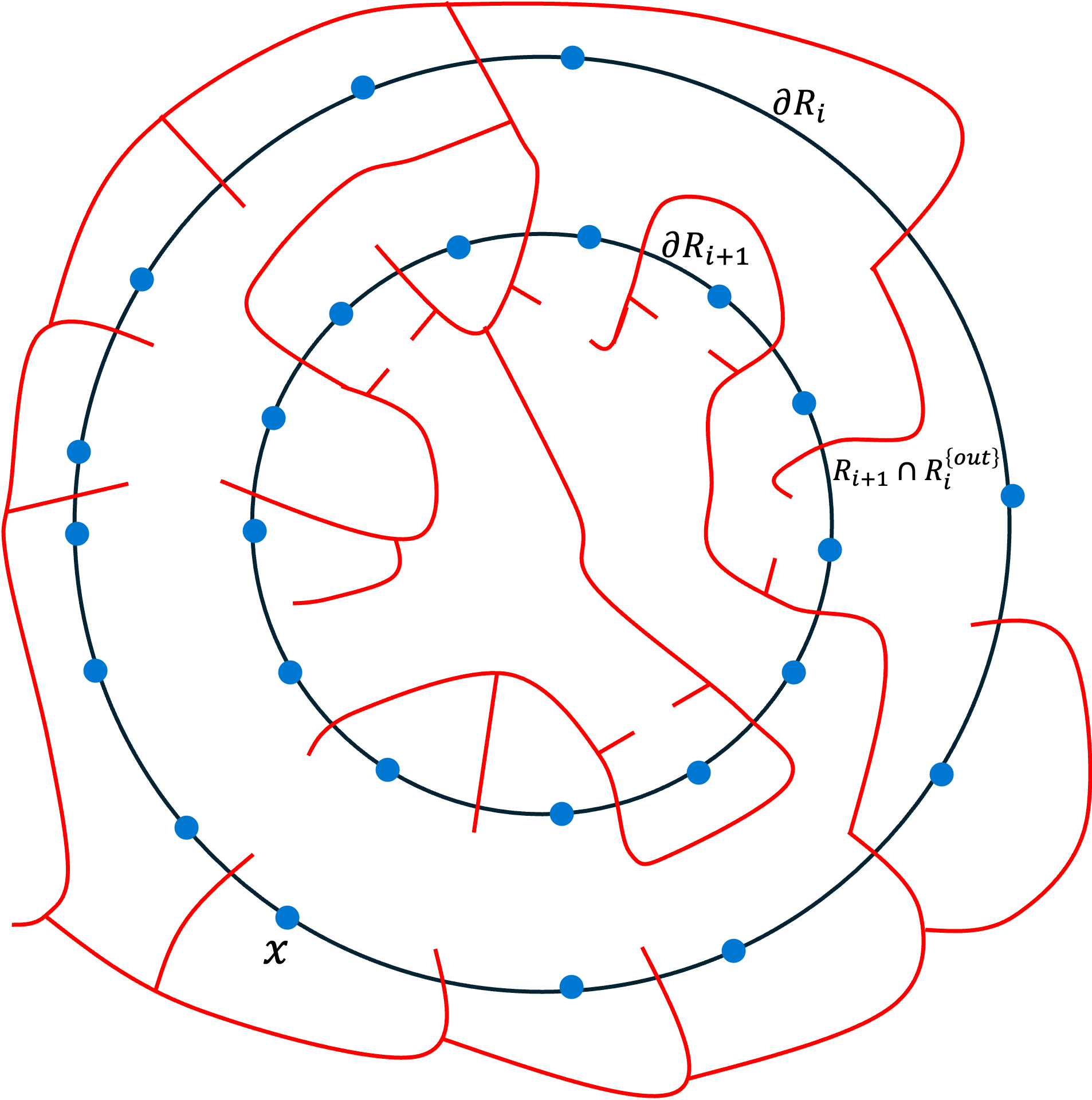
Figure 5: Dual coarse tree corresponding to Figure 4.
Binary search to locate the relevant subtree/segment is extended to this multi-resolution setting, and additional mechanisms (e.g., stack-based tracking of recursive calls and segment breakdowns) are employed to guarantee that only n1+o(1) overall work is performed, even as each recursive step involves nontrivial navigation among these representations.
Construction and Query Runtimes
As a result, any Voronoi diagram relevant for any tradeoff point in the oracle hierarchy can be constructed in n1+o(1)0 time for n1+o(1)1 sites, with n1+o(1)2 the decomposition depth and n1+o(1)3 the ultimate query time. For all practical (including optimal) parameter regimes, this yields n1+o(1)4 preprocessing for the entire oracle.
Additional auxiliary structures, such as side tables and shortcut mechanisms for segment decompositions and cross-boundary path tracking, are constructed in amortized n1+o(1)5 per entry or n1+o(1)6 in total (Figure 6).
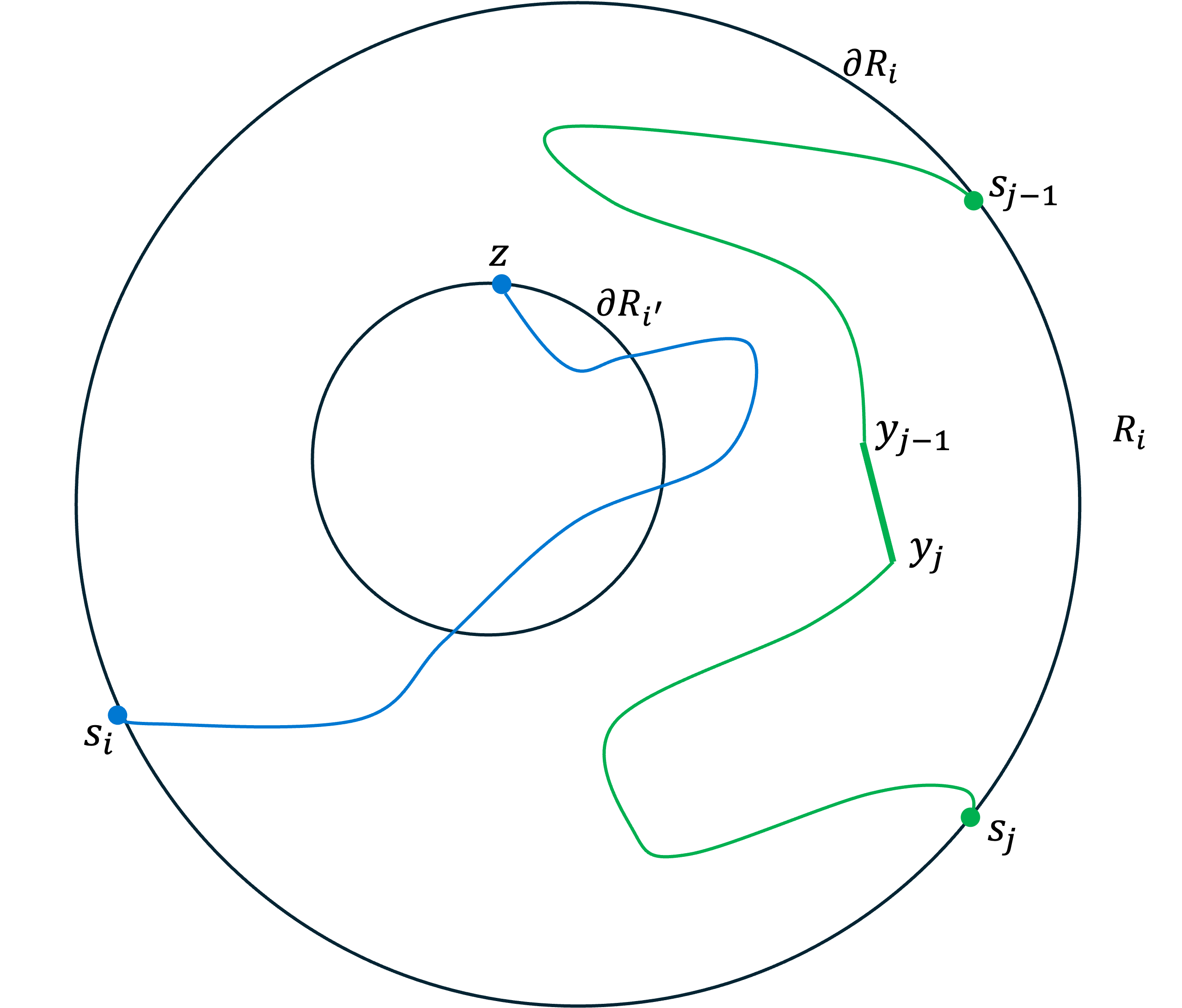
Figure 6: Schema for computation of side tables storing region-boundary crossing data for efficient query resolution.
Impact, Applications, and Implications
Theoretically, the result closes the gap between preprocessing and query complexity for exact planar distance oracles, previously believed to necessitate significant tradeoff and thus serving as an apparent barrier for further advances in dynamic or multi-source/destination settings.
Practically, the construction brings near-all-pairs reachability in planar networks (road networks, maps, etc.) close to the best-possible, with data structures of essentially linear size, near-linear construction, and polylogarithmic query time.
Dynamization: The efficient trichromatic-face location suffices to improve the update bounds on dynamic single-source shortest path oracles for planar graphs, as formerly described in [icalp2025planar], and extended to directed graphs in this work. The update/query separation matches prior all-pairs bounds, now with truly subpolynomial construction costs.
Outlook and Open Directions: The core techniques suggest that many planar-graph problems involving the extraction of local combinatorial structure via duality and separator-based decomposition—the diameter problem, Steiner distances, cut-equivalence queries—may now be amenable to similarly efficient solutions, or at least can reduce their complexity bottlenecks to other structural barriers.
Conclusion
The paper establishes that, up to vanishingly small factors, planar graph distances can be explicitly materialized into a compact, high-performance data structure “for free” (i.e., with nearly the same cost as parsing the adjacency list), thus removing preprocessing–query tradeoffs as a central issue in this domain. The foundational monotonicity insights and recursive decomposition techniques introduced therein are likely to influence both theory and systems dealing with planar or minor-closed graph families.