Minimalist Compliance Control
Abstract: Compliance control is essential for safe physical interaction, yet its adoption is limited by hardware requirements such as force torque sensors. While recent reinforcement learning approaches aim to bypass these constraints, they often suffer from sim-to-real gaps, lack safety guarantees, and add system complexity. We propose Minimalist Compliance Control, which enables compliant behavior using only motor current or voltage signals readily available in modern servos and quasi-direct-drive motors, without force sensors, current control, or learning. External wrenches are estimated from actuator signals and Jacobians and incorporated into a task-space admittance controller, preserving sufficient force measurement accuracy for stable and responsive compliance control. Our method is embodiment-agnostic and plug-and-play with diverse high-level planners. We validate our approach on a robot arm, a dexterous hand, and two humanoid robots across multiple contact-rich tasks, using vision-LLMs, imitation learning, and model-based planning. The results demonstrate robust, safe, and compliant interaction across embodiments and planning paradigms.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What this paper is about (in simple terms)
Robots often need to touch the world gently and safely—like wiping a board, drawing with a pen, or holding an egg. This “gentle touch” is called compliance. Many robots can’t do this well because they don’t have special force sensors to feel how hard they’re pushing.
This paper introduces Minimalist Compliance Control, a simple way to give robots a “sense of touch” without extra force sensors or complicated machine learning. It uses signals the motors already produce (their current or voltage) to estimate how much force the robot is feeling, and then reacts like a virtual spring and shock absorber to stay safe and stable during contact.
The big questions the paper asks
- Can a robot estimate push/pull forces well enough using only motor signals it already has?
- If we use those estimated forces to act like a spring–damper (think car suspension), will the robot behave safely and smoothly during contact?
- Does this simple method work on very different robots (arms, hands, humanoids)?
- Can it plug into different kinds of “brains” (like a vision-LLM, imitation learning, or a classic planner) without lots of tuning?
- Is it more reliable and safer in the real world than recent learning-based methods?
How the method works (everyday explanation)
Think of a robot as having “muscles” (motors) that tell you how hard they’re working. If you listen to those muscles, you can guess how much the robot is pushing against the world—similar to how you can tell your bike is going uphill because you have to pedal harder.
The approach has three main steps:
1) Reading the robot’s effort from its motors
- Motors already tell you their current or the PWM duty cycle (a kind of voltage signal). Higher current usually means the motor is working harder.
- With a quick calibration (learning a few constants like how current turns into torque), the robot estimates joint torque from motor signals.
- It corrects for simple effects:
- Gravity (so the robot doesn’t confuse “holding its arm up” with “pushing on the world”).
- Gearbox differences when driving forward vs being back-driven (like how pushing a shopping cart vs being pushed feels different).
- Some light smoothing to reduce noise (like averaging to quiet a shaky signal).
2) Converting joint effort into hand forces
- Torques at the joints (like shoulders and elbows) translate into forces at the hand. The math tool that maps joint effort to hand force is called the Jacobian—think of it as the robot’s built-in “lever diagram” that tells how joint pushes turn into fingertip pushes.
- The method can:
- Estimate the full 3D force (and torque) at a contact point, or
- Just estimate the most important direction (like the normal force pressing into a surface), which can be more stable and less noisy.
3) Acting like a virtual spring with damping
- Once the robot estimates the external force, it runs a simple spring–mass–damper model (like a pogo stick with a shock absorber):
- If it feels a stronger push than desired, it “gives” a little by adjusting its target position.
- This is called admittance control: use felt forces to slightly update where the end-effector (hand/tool) wants to be next.
- An inverse kinematics solver then turns that updated hand position into joint angles the robot can follow.
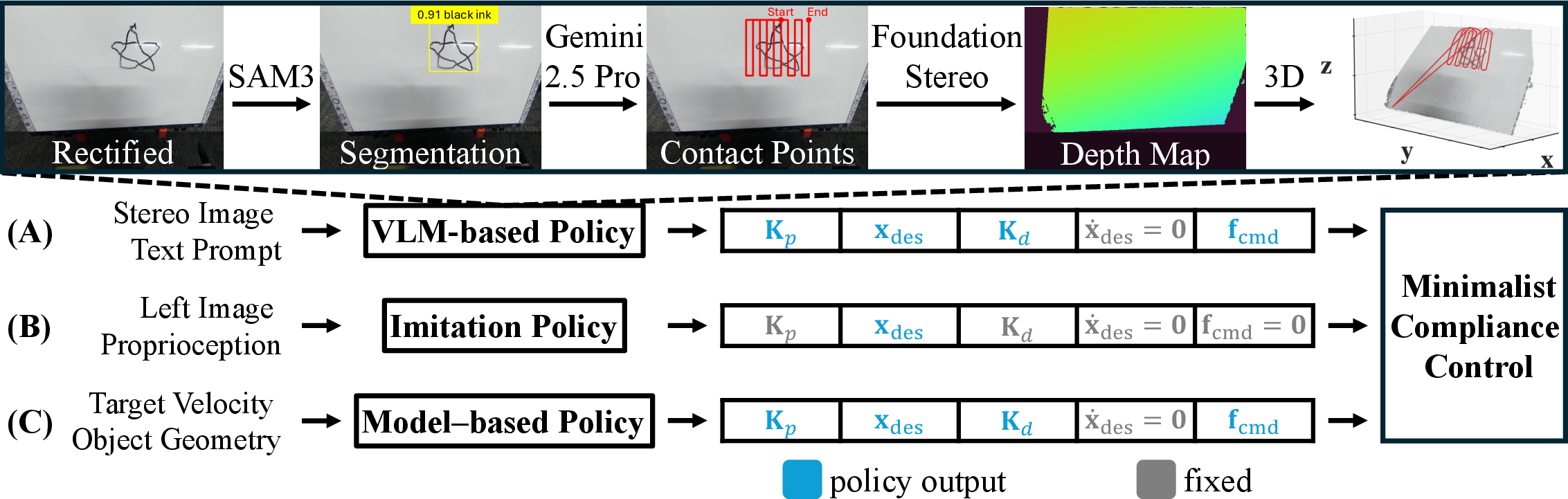
Plug-and-play with different planners
The low-level compliance module works with many “high-level brains”:
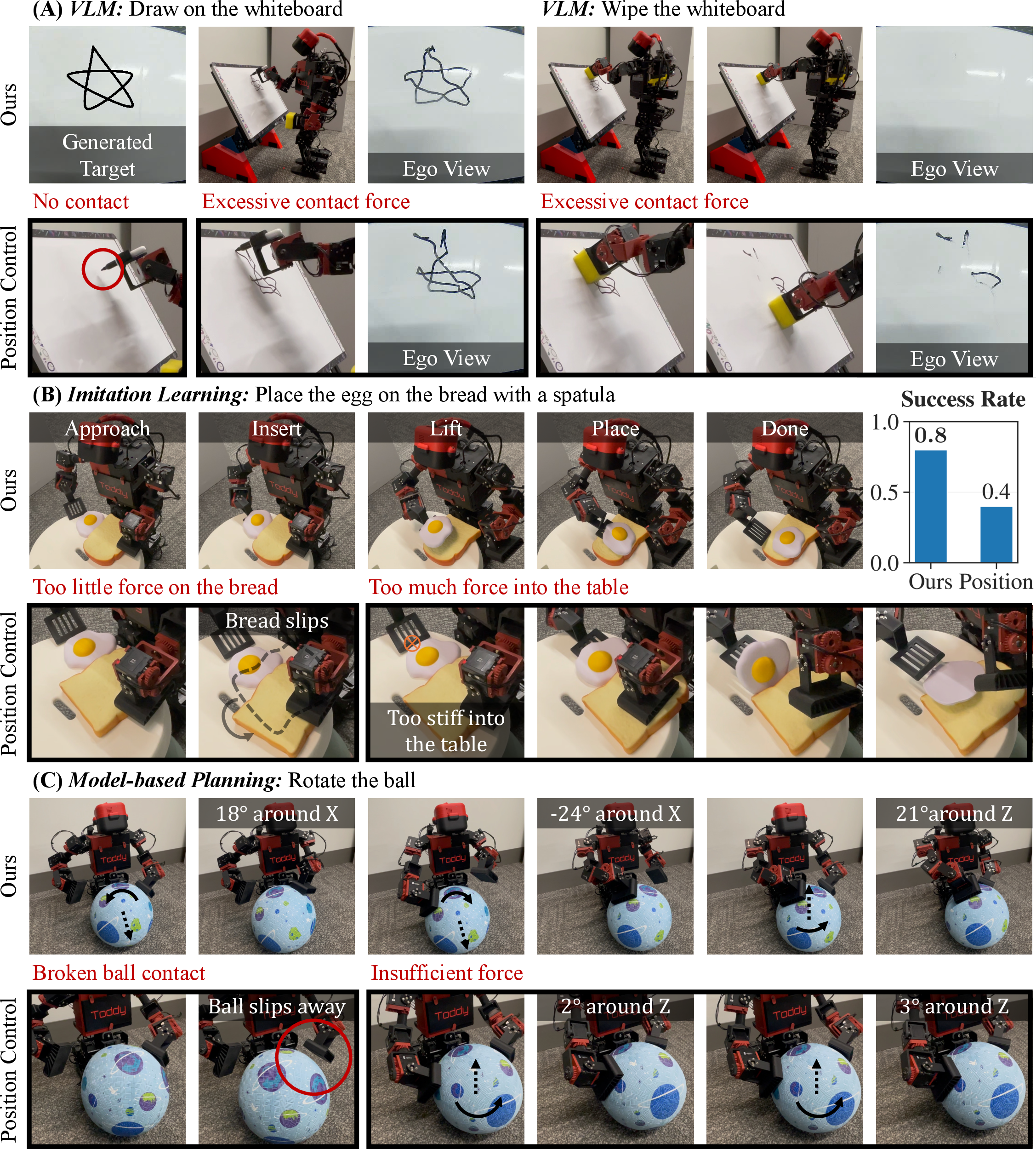
- Vision–LLMs: pick contact points and directions for tasks like wiping or drawing from a camera view and a text prompt.
- Imitation learning: copy human-like motions from demonstrations.
- Model-based planning: follow precise rules for when to control motion vs force during contact.
The same compliance layer helps all of these stay safe and stable when touching objects.
What the experiments show
The team tested on four very different robots: a robot arm, a humanoid, another small humanoid, and a dexterous hand. None had force sensors. They tried contact-heavy tasks like wiping, drawing, scooping/placing with a spatula, and in-hand object manipulation.
Main takeaways:
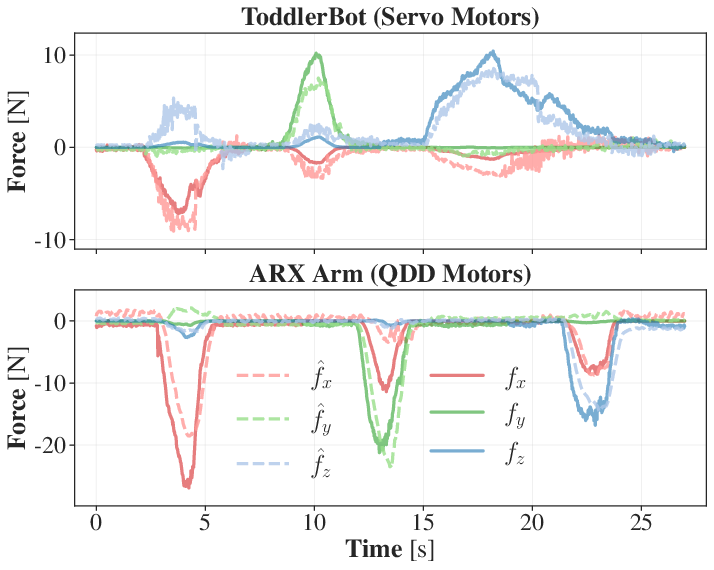
- Force estimates matched a professional force sensor fairly well: errors around about 1 newton on average, good enough to react safely and smoothly.
- Compared with recent reinforcement learning (RL) compliance controllers, this simple method tracked positions and orientations more accurately and kept contact forces safer and steadier during real tasks.
- On a spatula-and-egg task, success jumped from about 40% (plain position control) to about 80% with this method.
- On in-hand rotation tasks, it achieved noticeably larger, steadier rotations, while plain position control often slipped.
- It runs fast on small computers and needs little tuning.
Why that matters: Real robots need reliable, predictable behavior when touching the world. Learning-based methods can be powerful but sometimes behave unexpectedly in the real world. This method stays stable because it uses physics-based estimates and a classic, well-understood controller.
Why this matters and what could come next
- Lower cost, wider access: You don’t need special force sensors. That makes safe, gentle contact possible on many off-the-shelf robots.
- Works everywhere: It handled arms, hands, and humanoids, and plugged into multiple planning styles with minimal fuss.
- Safer real-world behavior: Because it reacts to estimated force direction quickly and predictably, it avoids sudden, risky spikes that can happen with black-box policies.
Limitations and future ideas:
- It assumes mostly slow, steady contacts (not super fast, high-impact motions).
- Very stiff or “sticky” transmissions may need extra modeling.
- Adding more detailed physics (like acceleration effects) could improve accuracy—but the beauty here is keeping it simple.
In short, Minimalist Compliance Control shows that robots can “feel” and react gently using just the effort signals they already have, making contact-rich tasks safer, cheaper, and more reliable across many kinds of robots.
Knowledge Gaps
Below is a single, actionable list of the paper’s unresolved knowledge gaps, limitations, and open questions that future work could address.
- Modeling accuracy and required bandwidth: Quantify the minimum force-direction/magnitude accuracy and frequency bandwidth needed for stable, safe admittance when using current/PWM-based wrench estimation across different embodiments.
- Formal stability/passivity guarantees: Provide a Lyapunov/passivity analysis of the full loop (admittance + EMA filtering + IK + position servos), deriving conditions on Kp/Kd, filter parameters, sampling period, and IK delay for stability under contact.
- Quasi-static assumption limits: Characterize performance bounds and failure modes when inertial/Coriolis/viscous effects are non-negligible; extend the estimator to explicitly include these dynamics for moderately dynamic tasks.
- PWM-only current inference robustness: Evaluate sensitivity to bus-voltage droop, driver nonlinearities, PWM dead-zones, and quantization; assess whether online Vbus sensing or driver identification is required for reliability.
- Thermal and time-varying motor parameters: Develop online/adaptive estimation for Rw, Kv, Kt, and efficiency η to handle temperature drift, aging, and manufacturing variability without offline calibration.
- Friction, stiction, backlash, and non-backdrivability: Move beyond direction-dependent gain to explicit friction/backlash modeling and compensation; determine applicability limits for high-reduction, self-locking, or non-backdrivable transmissions.
- Contact localization and multi-contact: The method assumes a known contact site for Jacobian mapping; devise techniques to localize contact(s) and distribute wrenches along the kinematic chain when contacts are unknown, multiple, or moving.
- Ambiguity of wrench attribution on floating-base systems: Integrate with whole-body controllers to resolve how joint-torque estimates should be partitioned among multiple contacts while preserving balance and feasibility.
- Sensitivity to incorrect or uncertain contact normals: Quantify how errors in VLM-predicted or heuristic normals degrade performance and propose online adaptation to infer principal compliant directions directly from measured responses.
- Jacobian conditioning and singularities: Systematically address ill-conditioning (noted transient spikes) with conditioning-aware estimators, damping/regularization selection rules, and contact-aware axis selection to prevent force artifacts.
- Filter design and latency: Study the latency–noise trade-off introduced by EMA filtering, propose adaptive or frequency-shaped filters, and quantify their impact on stability margins and contact responsiveness.
- Saturation and rate limits: Analyze and design safeguards for motor/servo saturation and rate limiting (including PWM/current and IK output limits) to ensure safe behavior under impacts and large disturbances.
- Gravity-only compensation limits: Assess how gravity model errors bias wrench estimates; investigate online identification or residual learning for gravity and other internal torque terms.
- Rotational wrench estimation: Validate and benchmark rotational torque estimation (using Jr) in real tasks; quantify cross-axis coupling and numerical conditioning relative to translational components.
- Underactuated/coupled actuation: Examine applicability to tendon-driven or coupled-joint hands where actuator-to-joint mapping is non-square or state-dependent; develop estimators for such actuation structures.
- Slip, contact state, and mode switching: Use estimated wrenches to detect touch/no-touch and incipient slip; formalize mode-switching logic and hysteresis to prevent chattering and improve robustness.
- Automated gain selection: Provide procedures to auto-tune Kp/Kd and commanded wrench setpoints to balance tracking, compliance, and safety across tasks and embodiments (e.g., gain scheduling based on estimated contact stiffness).
- Frequency response and Z-width characterization: Empirically characterize the achievable admittance/Z-width and phase margins across robots, including how estimation errors shape the effective impedance.
- Comparative baselines to gold standards: Run controlled comparisons against classical admittance with 6-axis F/T sensors or joint-torque sensors to quantify trade-offs in accuracy, safety, and robustness.
- Dynamic, high-speed interactions: Test limits in tasks with higher bandwidth contacts (sanding, cutting, peg-in-hole with high insertion speeds) to delineate where the quasi-static minimalist approach breaks down.
- Environmental variability: Study performance with soft, deformable, or time-varying compliant environments where contact geometry and stiffness evolve during interaction.
- Robustness to internal contacts and joint-limit torques: Detect and disambiguate torques from self-contact, joint limits, or cable routing that can be misinterpreted as external wrenches; propose mitigation strategies.
- Control architecture interactions: Evaluate replacing IK with whole-body QP control (constraints, torque limits, contact constraints) and quantify the effect on compliance, stability, and computational latency.
- In-situ self-calibration: Develop procedures for on-robot, hands-off calibration of motor constants and efficiency (without external sensors) and policies for re-calibration frequency to handle drift/wear.
- Uncertainty quantification: Attach confidence bounds to wrench estimates (e.g., via Bayesian or interval methods) and propagate them to adaptive controller choices for safer behavior.
- Safety certification and force limits: Define verifiable force/pressure limiting strategies using only motor/electrical signals, including fail-safe triggers and watchdogs for anomalous spikes or estimator faults.
- Multi-end-effector coordination: Explore coordinated compliance between two hands/arms where wrench estimates interact through the object; design controllers that prevent over-constraining or contact fighting.
- Reproducibility and tuning burden: Document and standardize calibration/tuning pipelines (α, λ, η, εvel, Kp/Kd ranges) and evaluate cross-robot portability to quantify “plug-and-play” effort at scale.
Practical Applications
Immediate Applications
Below are concrete, deployable applications that can leverage the paper’s “Minimalist Compliance Control” (MCC) today, using only motor current or PWM plus kinematics to estimate external wrenches and drive a task-space admittance controller. Each item lists likely sectors, candidate tools/products/workflows, and key assumptions/dependencies that affect feasibility.
- Retrofit compliance for existing industrial and research robots without F/T sensors (Robotics, Manufacturing, Logistics, Academia)
- Tools/products/workflows:
- ROS2/MoveIt integration of MCC as a position-control “compliance plugin”
- A “motor sysID wizard” to calibrate Kv, Kt, Rw (or ingest manufacturer data) and set direction-dependent efficiency
- Axis-selective wrench estimation (normal-force control) for robust surface contact
- Drop-in wrappers for common servos (e.g., Dynamixel) and QDD drives via vendor APIs
- Assumptions/dependencies:
- Access to PWM or motor current from actuator drivers, known/constant bus voltage, and kinematic Jacobians
- Quasi-static or low-speed contacts dominate; actuators are not fully non-backdrivable; backlash/stiction manageable
- Accurate gravity compensation and an IK solver running at ~100 Hz with modest compute (e.g., Jetson-class)
- Contact-rich finishing and maintenance: wiping, polishing, sanding, deburring, surface cleaning (Manufacturing, Facilities, Energy—solar panel cleaning, turbine blade wiping)
- Tools/products/workflows:
- MCC with axis-aligned normal-force control; force-limited admittance parameters
- Teach-and-repeat or VLM-suggested path generation; guardrails for force thresholds
- Simple QA workflow: bench-press against a known F/T sensor once for on-site validation
- Assumptions/dependencies:
- Stable contact geometry and known/contact-normal direction (from CAD, VLM, or prior mapping)
- Environmental variability is limited; quasi-static interaction; surface wear acceptable within normal tolerances
- Insertion, alignment, door/drawer operation, and fixture-seeking with low-cost arms (Manufacturing, Logistics, Service Robotics)
- Tools/products/workflows:
- Hybrid stiffness profiles: high stiffness tangential to task direction, low stiffness along insertion/contact axes
- Model-based planners (e.g., OCHS) to assign force/velocity directions executed via MCC
- Assumptions/dependencies:
- Light to moderate forces; compliance reduces jamming but does not replace precision fixturing in tight-tolerance fits
- Adequate kinematic models and workspace constraints to prevent singularities/ill-conditioning
- Human-safe interaction for low-cost cobots and mobile manipulators (Industrial Safety, Service Robotics)
- Tools/products/workflows:
- Safety envelopes/policies that modulate stiffness and damping; axis-limited wrench estimation to avoid force spikes
- Runtime filters (EMA) and force limits tied to ISO/cobot safety guidelines
- Assumptions/dependencies:
- Conservative admittance gains; validated torque/current mapping under worst-case temperature/load
- Organizational safety processes to certify sensorless force estimation for collaborative use
- Household/service tasks: whiteboard/window cleaning, countertop wiping, simple kitchen assistance (e.g., scraping/spreading) (Consumer Robotics, Hospitality)
- Tools/products/workflows:
- VLM-based waypoint and normal estimation from stereo/RGB-D; MCC ensures contact despite perception noise
- Pre-tuned “task profiles” for different surfaces and tools (sponges, squeegees, spatulas)
- Assumptions/dependencies:
- Low-speed operation; safe tools; household surfaces with benign friction ranges
- Cloud VLM latency tolerable for planning (seconds), with on-robot execution at high rate
- Dexterous hand tasks: in-hand reorientation, multi-finger drawing/wiping (Robotics R&D, Product Prototyping)
- Tools/products/workflows:
- MCC per finger with projected normal-force control; bimanual or multifinger hybrid force-velocity execution
- Simple model-based sequences for reorientation; optional VLM-generated paths for drawing
- Assumptions/dependencies:
- Mechanical coupling/backlash manageable; consistent finger kinematics; quasi-static manipulation
- Optional tactile sensors complementary but not required
- Education and rapid prototyping: teaching compliance without expensive F/T sensors (Education, Academia)
- Tools/products/workflows:
- Course modules and labs using Dynamixel/QDD kits; open-source MCC package and notebooks
- Teleoperation demonstrations and imitation policy pipelines (e.g., Diffusion Policy) calling MCC for safe contact
- Assumptions/dependencies:
- Students can read actuator PWM/current and run basic sysID; safe lab settings with soft tools/surfaces
- Software middleware and SDKs: “Compliance-as-a-service” for robot vendors (Software, Robotics OEMs)
- Tools/products/workflows:
- Vendor-branded MCC SDK: PWM-to-wrench module, admittance controller, and IK service
- MoveIt/ROS plugins; bindings to vision pipelines (VLM-based trajectory/normal prediction)
- Assumptions/dependencies:
- Vendor exposes low-level actuator signals and allows position target injection at sufficient rate
- Legal/contractual terms for low-level access and warranty boundaries
Long-Term Applications
These applications are promising but require further research, modeling, scaling, or certification.
- High-speed, dynamic contact manipulation (tight-tolerance insertion, fast tool use, catching, dynamic surface processing) (Advanced Manufacturing, Robotics)
- Potential tools/products/workflows:
- Augmented MCC with inertial/Coriolis/friction models; higher-bandwidth observers; disturbance observers fused with PWM/current
- Event-based gain scheduling and model predictive control for dynamic contacts
- Assumptions/dependencies:
- Precise, temperature-compensated motor models; reduced backlash/stiction or better transmission modeling
- Higher-rate control loops and certified stability analyses in the relevant frequency bands
- Heavy-duty robots and non-backdrivable actuators (construction, large logistics) (Construction Robotics, Heavy Industry)
- Potential tools/products/workflows:
- MCC augmented with explicit stiction/backlash models, friction identification, or minimal additional sensing
- Mechanical retrofits (e.g., partial backdrivability, lower gear ratios) plus sensorless compliance
- Assumptions/dependencies:
- Feasible to estimate external wrenches despite poor torque transparency; possibly requires partial hardware changes
- Rigorous stress and safety testing under large loads
- General-purpose humanoids: whole-body compliant interaction at scale (Service Robotics, Warehousing, Retail)
- Potential tools/products/workflows:
- Fleet-level deployment workflows: per-joint auto-calibration, remote monitoring of torque-current drifts, self-check routines
- Policy stacks combining VLM task selection, imitation for skilled subtasks, and model-based hybrid force-velocity acts via MCC
- Assumptions/dependencies:
- Robust perception and contact localization; mature failure recovery; certified safety in human environments
- Healthcare assistive and rehabilitation robots (safe patient handling, ADL assistance) (Healthcare)
- Potential tools/products/workflows:
- MCC tuned with strict force/pressure limits; multi-redundant safety monitors; integration with soft end-effectors
- Clinical workflows with supervised adaptation to individual patients
- Assumptions/dependencies:
- Regulatory approvals (FDA/CE) demanding exhaustive validation and fail-safe mechanisms
- Possibly hybrid sensing (minimal tactile/pressure sensors) to meet medical safety margins
- Field maintenance in energy and infrastructure: compliant surface work in harsh settings (Energy—wind/solar, Utilities, Oil & Gas)
- Potential tools/products/workflows:
- Ruggedized MCC with sealed actuators; offline-performed sysID adjusted for temperature via on-board thermal models
- Semi-autonomous routines for cleaning/inspecting blades, panels, and pipelines with normal-force control
- Assumptions/dependencies:
- Environmental variability (wind, temperature) demands robust compensation; periodic recalibration or self-calibration
- Tactile synergy: fusing MCC with sparse, low-cost skin to approach F/T performance (Robotics, Sensors)
- Potential tools/products/workflows:
- Sensor fusion pipelines that use MCC estimates for global force direction/sign and tactile patches for local shear/pressure
- Learning-based residuals on top of model-based MCC with safety guarantees
- Assumptions/dependencies:
- Reliable tactile hardware; calibration procedures; robust fusion frameworks that preserve stability
- Standards and policy: codifying sensorless compliance into safety and procurement guidelines (Policy, Industrial Safety, Education)
- Potential tools/products/workflows:
- Test protocols for validating sensorless force estimation accuracy (sign consistency, bandwidth, maximum force)
- Language in ISO 10218/TS 15066-like standards acknowledging model-based, sensorless force-limiting methods
- Public-sector procurement checklists enabling low-cost educational robots with compliant interaction
- Assumptions/dependencies:
- Consensus among standards bodies; multi-lab benchmarking datasets; liability frameworks for sensorless control
- Cost-driven retrofits and business models (Finance/Operations for Robotics Vendors and Integrators)
- Potential tools/products/workflows:
- “Compliance upgrade kits” offering MCC plus calibration tools; service contracts for periodic health checks
- ROI calculators comparing F/T sensors versus MCC retrofits in contact-rich tasks
- Assumptions/dependencies:
- Demonstrated mean-time-between-failure without F/T hardware; clear savings in BOM and maintenance costs
Notes on Cross-Cutting Assumptions and Dependencies
- Hardware and signals:
- Requires access to motor current or PWM and bus voltage; reliable kinematic models and Jacobians
- Prefer servos/QDDs with some backdrivability; significant backlash/stiction needs modeling or limits performance
- Operating regime:
- Quasi-static or low-frequency interactions favored; dynamic tasks may need added dynamics/friction modeling
- Calibration and stability:
- Motor constants (Kt, Kv, Rw, efficiency) must be known or calibrated; EMA or similar filtering balanced with responsiveness
- IK solver must run reliably at control rate; gravity compensation active; ill-conditioned Jacobians handled (e.g., axis-projection)
- Safety and compliance:
- Force limits, watchdogs, and gain margins required for human environments; organizational certification for collaborative use
- Integration with planners:
- Compatible with VLM-based waypoint/normal prediction, imitation policies, and model-based hybrid force-velocity planning
- Network latency for cloud VLMs acceptable for planning stages; execution is on-robot at high rate
These applications follow directly from the paper’s core innovation: obtaining sufficiently accurate, sign-consistent external wrench estimates from ubiquitous actuator signals and using task-space admittance to achieve safe, robust compliance without force sensors or learning.
Glossary
- Admittance control: A model-based control approach that maps measured forces/torques to compliant motion via virtual dynamics. "incorporated into a task-space admittance controller"
- Back EMF: The voltage induced by a motor’s rotation that opposes the applied voltage. "where $V_{\text{emf}$ is the back EMF"
- Backdrivable: Describes actuators/transmissions that can be driven backward by external forces. "Our current approach does not account for non-backdrivable or self-locking actuators."
- Backlash: Mechanical play in transmissions (e.g., gears) that causes lost motion when reversing direction. "Motors with significant stiction or backlash are also not explicitly modeled"
- Coriolis effects: Velocity-dependent inertial forces arising from motion in rotating frames that affect robot dynamics. "inertial and velocity-dependent terms—such as joint acceleration and Coriolis effects—are negligible"
- Critical damping: The damping level that returns a system to equilibrium as fast as possible without oscillation. "the damping matrix is set for critical damping as "
- Diffusion policy: A control policy that uses diffusion models to generate action sequences conditioned on observations. "We use a diffusion policy~\citep{chi2023diffusion} with a conditional 1D UNet"
- Drive state: The forward/backward power-flow condition indicating whether the motor is driving the load or being back-driven. "where is the forward/backward drive state determined from the sign of power flow $\tau_{\text{w} \dot{q}$"
- EMA filter: Exponential moving average filter used to smooth noisy measurements with a tunable responsiveness/smoothing trade-off. "we apply an exponential moving average (EMA) filter with for ToddlerBot and for the ARX arm."
- End-effector: The robot’s tool tip or contact site whose pose and interaction forces are controlled. "each end-effector is modeled as a spring--mass--damper system"
- External wrench: The vector of external forces and torques applied to the robot from the environment. "External wrenches are estimated from actuator signals and Jacobians"
- Force/torque sensors: Sensors that directly measure forces and torques, typically at the end-effector. "Standard admittance and impedance control typically rely on expensive force/torque sensors"
- Gear ratio: The transmission ratio between motor and output joint that scales speed and torque. "servo motors with high-reduction transmissions (gear ratios exceeding )"
- Hybrid force-velocity control: A control strategy that regulates force in some directions while tracking velocities in others. "compute a hybrid force-velocity control."
- Impedance control: A control approach that regulates motion by shaping the dynamic relationship between force and displacement. "Standard admittance and impedance control typically rely on expensive force/torque sensors"
- Inverse kinematics (IK): The computation of joint configurations that achieve a desired end-effector pose. "mapped to joint-space via an inverse kinematics (IK) solver"
- Jacobian: The matrix that maps joint velocities/torques to end-effector velocities/forces at a contact site. "using a motor torque model and Jacobians."
- Matrix square root: A matrix that, when multiplied by itself, yields a given positive semidefinite matrix. "where denotes the matrix square root."
- PWM (pulse-width modulation): A method to control effective voltage/current by varying duty cycle of a switching signal. "PWM (pulse-width modulation, which is essentially voltage)"
- Proprioceptive signals: Internal robot measurements (e.g., joint positions, currents) used to infer interaction and state. "implicitly infer external wrenches from proprioceptive signals"
- Quasi-direct-drive (QDD): Actuators with low gear reduction that provide high torque transparency for compliant control. "quasi-direct-drive (QDD) motors"
- Quasi-static: An interaction regime where inertial effects are negligible compared to gravity and contact forces. "We assume a quasi-static interaction regime"
- Regularized least-squares: An estimation method that adds a penalty term to improve conditioning and robustness to noise. "recover the contact force and optionally the torque by solving a regularized least-squares problem:"
- Rotation vector: An orientation representation using a 3D axis-angle vector. "orientation represented as a rotation vector"
- Sim-to-real gap: The discrepancy between behavior learned or tested in simulation and performance on real hardware. "suffer from the sim-to-real gap"
- Spring–mass–damper model: A virtual dynamic model with stiffness and damping used to produce compliant motion. "These estimates drive a spring--mass--damper model to update task-space position references."
- Stiction: Static friction that must be overcome to initiate motion, causing sticking at low speeds. "Motors with significant stiction or backlash are also not explicitly modeled"
- Tactile sensing: Sensing of contact forces/pressure at surfaces to detect touch and shear/normal components. "force/torque/tactile sensing hardware"
- Torque constant: The motor constant relating winding current to output torque. "The motor torque constant $K_{\text{t}$ is calibrated"
- Velocity constant: The motor constant relating rotational speed to back EMF voltage. "$K_{\text{v}$ is the velocity constant."
- Vision–LLM (VLM): A model that integrates visual inputs with language to produce task-relevant predictions. "vision--LLMs (VLMs)"
- Winding resistance: The electrical resistance of the motor’s windings used in current/torque estimation. "$R_{\text{w}$ is the winding resistance"
Collections
Sign up for free to add this paper to one or more collections.