PPISP: Physically-Plausible Compensation and Control of Photometric Variations in Radiance Field Reconstruction
Abstract: Multi-view 3D reconstruction methods remain highly sensitive to photometric inconsistencies arising from camera optical characteristics and variations in image signal processing (ISP). Existing mitigation strategies such as per-frame latent variables or affine color corrections lack physical grounding and generalize poorly to novel views. We propose the Physically-Plausible ISP (PPISP) correction module, which disentangles camera-intrinsic and capture-dependent effects through physically based and interpretable transformations. A dedicated PPISP controller, trained on the input views, predicts ISP parameters for novel viewpoints, analogous to auto exposure and auto white balance in real cameras. This design enables realistic and fair evaluation on novel views without access to ground-truth images. PPISP achieves SoTA performance on standard benchmarks, while providing intuitive control and supporting the integration of metadata when available. The source code is available at: https://github.com/nv-tlabs/ppisp



Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper is about making 3D scenes look correct when you create new images from different camera angles. The authors focus on fixing problems caused by cameras themselves—like changes in brightness, color, and lens effects—so the 3D scene doesn’t get confused by these camera quirks. They introduce a method called PPISP that models how a real camera works and adds an “auto” controller to set brightness and color for new views, just like auto‑exposure and auto white balance do on your phone.
What are the main questions?
- How can we stop camera settings (like exposure and white balance) and lens effects (like dark corners) from messing up 3D scene reconstruction?
- Can we build a correction system that is physically realistic, easy to understand, and works for new viewpoints where we don’t have a real photo to compare against?
- Can this system predict the right brightness and color for new views on its own, similar to how a camera’s auto settings work?
How did they do it? Methods in everyday terms
Think of “radiance fields” as a smart 3D photo that lets you render new images from angles you didn’t originally shoot. These methods assume the scene looks the same across all input photos. But in real life, cameras change settings and have quirks, which break that assumption.
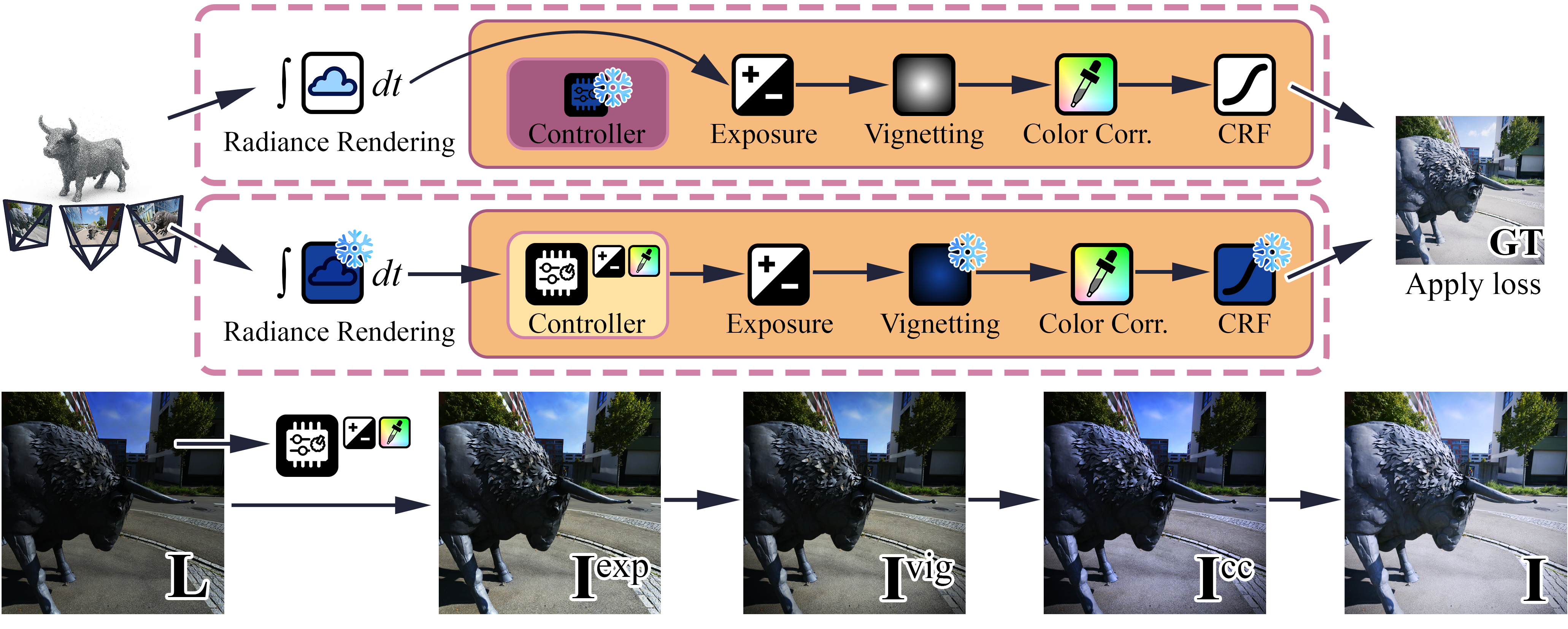
The authors add a simple, explainable image processing pipeline on top of the 3D rendering. It mimics four parts of a real camera and fixes issues without changing the actual 3D scene.
The four camera‑effect modules
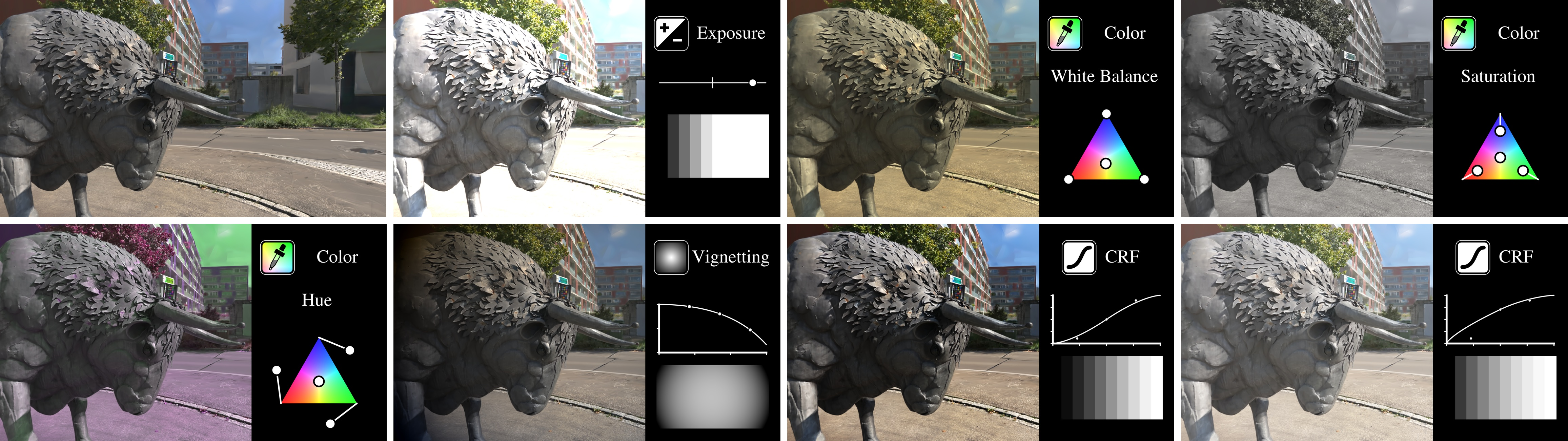
The pipeline applies these modules in order, each one doing a specific, physically realistic job:
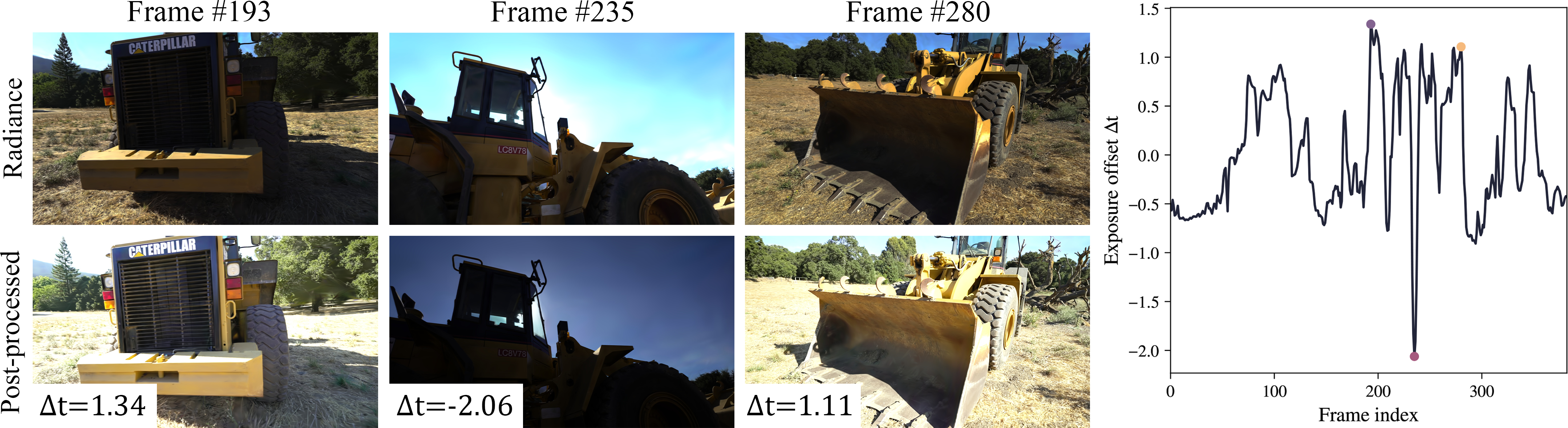
- Exposure offset: A global “brightness knob” per photo. It models things like shutter speed, aperture, and ISO. It only changes overall brightness, nothing else.
- Vignetting: Fixes darkening toward the corners of the image (common with lenses). Imagine a spotlight that is strongest in the center and fades at the edges; this module corrects that fade per color channel.
- Color correction: Adjusts color balance (like white balance and differences between camera sensors). It carefully changes color without accidentally changing brightness, so exposure stays separate from color.
- Camera response function (CRF): Models how sensors turn light into pixel values in a non‑linear way. Think of it as the camera’s “S‑curve” for shadows and highlights plus gamma (overall contrast). This keeps the look realistic.
To keep things honest and prevent the 3D model from “cheating,” the authors add regularization—soft rules that stop parameters from drifting too far (for example, vignetting shouldn’t brighten the corners, and color changes shouldn’t vary wildly across channels).
The controller: auto settings for new views
When you render a new view (a viewpoint where you didn’t take a real photo), you don’t know the photo’s exposure or white balance. The authors train a small neural controller to look at the rendered image and predict the best exposure and color correction automatically—like a camera deciding auto‑exposure and auto white balance. This controller is trained on the original input views but then used on new views, so you can render a plausible image without seeing the ground‑truth photo.
If metadata (like EXIF exposure information) is available, the controller can use it to do even better.
What did they find and why it matters
- Better quality for new views: On several benchmark datasets, PPISP produces higher scores (PSNR, SSIM, and LPIPS) than competing methods. In simple terms, the rendered images look closer to real photos and more consistent across angles.
- Realistic evaluation: Many older methods “cheat” during testing by using the real target photo to re‑adjust colors afterward. PPISP avoids this by predicting exposure and color automatically, making evaluation fair and closer to real-world use.
- Interpretable control: Each module has a clear job (brightness, corners, color, tone curve), so users can understand and adjust them. This is unlike black‑box latent vectors that are hard to control.
- Works with metadata: When exposure information is known (for example, from HDR sequences), PPISP plugs it in and gets even better results.
- Fast enough: The base pipeline adds very little runtime overhead; the controller adds some but is still lighter than some strong baselines.
These results matter because they make 3D scene rendering more reliable in real-world conditions where camera settings vary, and they remove the need to peek at the ground‑truth photo for corrections.
What could this change? Implications and impact
- More trustworthy 3D reconstructions: By separating the camera’s behavior from the scene, 3D methods can recover the true look of the world without being confused by camera quirks.
- Fair comparisons and practical deployments: Because PPISP doesn’t rely on target photos to “fix” its output, it’s better suited for real applications (like VR/AR, digital twins, film sets, and simulation) where you can’t compare against ground truth.
- Easier user control: Creators can dial in brightness and white balance like on a camera, and the system predicts sensible values for new views automatically.
- Better use of metadata: PPISP naturally uses camera information (like exposure) to improve results, which is useful for professional workflows and phones that log EXIF data.
In short, PPISP brings camera‑aware, physically grounded corrections to 3D rendering, improving quality and making the process more understandable and robust—especially when creating images from viewpoints that were never actually photographed.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a concise list of what remains missing, uncertain, or unexplored in the paper, framed to be actionable for future research.
- Real-camera ISP coverage: The pipeline omits several common spatially adaptive effects (local tone mapping, lens flares, glare/halation, highlight compression, denoising, sharpening), limiting fidelity on modern smartphone imagery; how to add controlled spatial adaptivity without overfitting or entangling scene geometry remains open.
- Per-frame CRF dynamics: The CRF is modeled as a per-camera, fixed nonlinearity, while many cameras vary tone mapping per scene/shot; investigate controllable per-frame (or per-scene) CRF prediction that generalizes to novel views without leaking content-specific effects.
- Noise and gain modeling: Sensor noise (shot/read noise), ISO-dependent gain, and in-camera denoising are not modeled; study how explicit noise models and gain calibration affect reconstruction quality and controller robustness.
- Spectral correctness and RAW space: The pipeline operates in RGB with homography-based color correction; evaluate physically grounded spectral models (sensor spectral sensitivities, illuminant SPD) or reconstruction/rendering in RAW space with DNG metadata to disambiguate white balance and color transforms.
- Chromatic aberration and geometric lens effects: Only chromatic vignetting is modeled; extend to chromatic aberration, radial/tangential distortion, and lens shading maps to improve color/geometry disentanglement.
- Vignetting generality: The radial polynomial assumes fixed intrinsics and a single optical center; characterize failures under zoom/focal changes, off-axis sensors, fisheye lenses, and per-pixel lens shading, and develop adaptable vignetting models.
- Identifiability and parameter disentanglement: Despite regularization, scale/color ambiguities between radiance and ISP parameters may persist; provide theoretical/empirical identifiability analyses and diagnostics to detect and prevent parameter leakage.
- Controller scope and architecture: The controller predicts only exposure and color correction with a simple 1×1-conv+MLP; systematically compare architectures (global vs regional features, transformers) and additional predicted controls (e.g., CRF, per-scene WB gains) for improved generalization.
- Reliance on correlations and metadata: The controller’s success depends on correlations in the training data and available metadata; quantify failure modes under manual overrides (fixed shutter/aperture/ISO), and design metadata-aware or metadata-robust training (e.g., simulate overrides, semi-supervised targets).
- Dynamic scenes and lighting: Experiments focus on static scenes; assess performance when illumination changes (moving lights, time-of-day), dynamic content, and rolling shutter effects, and extend the controller to temporally consistent predictions.
- Multi-camera calibration and fusion: The paper uses per-sensor parameters but does not detail cross-device calibration; develop procedures to estimate/transfer sensor-specific CRF, vignetting, and color matrices across heterogeneous cameras and validate multi-camera fusion robustness.
- Evaluation protocols without GT: While criticizing color-aligned evaluation, the work still reports GT-based PSNR/SSIM/LPIPS; define standardized, GT-free evaluation metrics and protocols (e.g., exposure/contrast invariants, perceptual/user studies) that fairly compare methods under photometric variation.
- Trade-off between capacity and generalization: The capacity–overfitting analysis is dataset-limited; formalize capacity control (e.g., VC dimensions, regularizers, sparsity constraints) and derive guidelines for selecting module capacity to balance training-view fit and novel-view generalization.
- Integration with 3D exposure fields: The paper mentions 3D exposure neural fields but does not benchmark against them; perform controlled comparisons/hybrids to understand when per-frame controllers vs 3D fields are preferable.
- Use of richer EXIF/DNG metadata: Only relative exposure is used; explore incorporating WB gains, color correction matrices, lens shading maps, ISO/shutter/aperture, focus distance, and scene illuminant estimates to improve parameter prediction and physical plausibility.
- Temporal consistency and flicker: The controller is trained per-frame without explicit temporal constraints; add temporal regularization or recurrent models to prevent flicker in rendered sequences and study the impact on NVS quality.
- Robustness to extreme HDR and night scenes: Limited evidence on very high dynamic range, severe low light, specular highlights, and flare; create stress-test datasets and extend models (e.g., HDR rendering, flare simulators) to handle these cases.
- Performance and scalability: Controller adds ~26% overhead on RTX 5090; profile and optimize for high-resolution, real-time, and edge devices, and quantify the cost–quality trade-off across reconstruction back-ends.
- Generalization across reconstruction methods: PPISP is tested with 3DGUT and 3DGS; evaluate with diverse NeRF variants (Mip-NeRF 360, RawNeRF, CamP, SMERF) to test universality and identify back-end-specific interactions.
- Hyperparameter sensitivity and fairness: ADOP’s CRF regularization was increased ~100×; run sensitivity analyses across baselines and PPISP to ensure fair, reproducible comparisons and publish recommended settings per dataset.
- User-controllable target appearance: The paper claims intuitive control but does not formalize interfaces/objectives for user-specified appearance (e.g., target brightness/WB/contrast curves); design and evaluate user-in-the-loop controllers with constraints/priors to achieve desired looks.
- Dataset diversity and ground truth: The custom PPISP dataset includes three cameras but limited scene types; curate broader benchmarks with RAW/EXIF/DNG ground truth, controlled lighting, and per-device calibration to validate physical plausibility and controller accuracy.
Practical Applications
Practical Applications of PPISP (Physically-Plausible ISP) for Radiance Field Reconstruction
Below, we synthesize actionable, real-world applications enabled by PPISP’s physically grounded ISP modeling and controller for auto exposure/white balance. Each item names the sector, outlines potential tools/products/workflows, and notes key assumptions or dependencies.
Immediate Applications
- Virtual production and VFX (media/entertainment)
- What: Harmonize multi-camera, multi-take photometry for NeRF/3DGS-based assets; enable creative yet physically interpretable control (exposure, white balance, CRF) at render time.
- Tools/products/workflows: PPISP plugin in NeRF/3DGS pipelines (e.g., GSplat/3DGS, 3DGUT), render farm integration; DCC hooks (e.g., an exporter to Nuke/AE/DaVinci for color-matching).
- Dependencies/assumptions: Static scenes or quasi-static capture; calibrated camera intrinsics/extrinsics; ISP effects within modeled scope (global exposure, radial vignetting, linear color homography, CRF). Controller accuracy benefits from EXIF metadata when present. Overhead: ~3% (without controller) to ~26% (with controller) of render time on a modern GPU.
- Content creation and 3D capture apps (software/consumer, daily life)
- What: More consistent 3D models and tours from casual captures (smartphone, action cameras) with intuitive “camera-like” controls for exposure/white balance on novel views.
- Tools/products/workflows: Integration into mobile 3D capture SDKs and cloud reconstruction services; “appearance controller” UI for creators.
- Dependencies/assumptions: Multi-view capture with known or estimated poses; limited handling of phone-style localized tone mapping and flares.
- E-commerce, real estate, and digital twins (retail, AEC)
- What: Consistent photometry for product and property scans across different devices and sessions; reduced post-capture color grading.
- Tools/products/workflows: PPISP as a post-process in Matterport-like pipelines, 3D product viewers, and room-scale digital twin services.
- Dependencies/assumptions: Sufficient coverage and pose quality; uniform lighting or at least stable global photometry (PPISP doesn’t perform relighting).
- Robotics and autonomy simulation (robotics/automotive)
- What: Domain-randomized, camera-like exposure/AWB variations for synthetic training data; photometric normalization for multi-camera datasets at reconstruction.
- Tools/products/workflows: PPISP in data generation stacks for perception; controller-driven exposure/AWB sampling; metadata-aware harmonization for multi-sensor rigs (e.g., Waymo-style datasets).
- Dependencies/assumptions: Radiance fields available (reconstructed or synthetic); controller generalizes to target content; metadata improves fidelity where auto controls were overridden.
- Photogrammetry/SfM preprocessing (software/vision tooling)
- What: Compensate vignetting, exposure, and CRF to improve feature matching and photometric consistency before reconstruction.
- Tools/products/workflows: PPISP-run pre-harmonization module feeding COLMAP/other SfM/SLAM; improved bundle adjustment stability.
- Dependencies/assumptions: Reasonable initialization of intrinsics; polynomial vignetting model suffices for lenses in use.
- Multi-camera rig calibration and QA (camera manufacturing, studios)
- What: Estimate per-sensor vignetting and CRF; standardize appearance across rigs; validate ISP behavior with interpretable parameters.
- Tools/products/workflows: PPISP-based calibration suite; per-camera parameter reports; acceptance tests for production rigs.
- Dependencies/assumptions: Calibration charts or structured scenes improve robustness; assumes stability of sensor response over time.
- Cultural heritage digitization (museums/archives)
- What: Harmonize heterogeneous captures from different cameras and times into consistent, color-faithful 3D reconstructions.
- Tools/products/workflows: PPISP post-processing within conservation-grade digitization pipelines; interpretable color controls for curators.
- Dependencies/assumptions: Intrinsics/extrinsics known or recoverable; minimal spatially adaptive phone ISP effects.
- Academic benchmarking and evaluation (academia, policy for research practice)
- What: Fairer novel-view evaluation without access to target images by using controller-predicted parameters; reduced dependence on post-hoc affine alignment.
- Tools/products/workflows: PPISP-enabled evaluation scripts; benchmark protocols specifying “no access to target pixels” with controller inference for NVS.
- Dependencies/assumptions: Community adoption; reproducible training splits and metadata usage.
- HDR and exposure-bracketed pipelines (imaging, software)
- What: Use EXIF-relative exposure to stabilize appearance across brackets and cameras; improve NVS in HDR-NeRF-like workflows.
- Tools/products/workflows: Metadata-aware controller input; hybrid HDR compositing plus PPISP harmonization.
- Dependencies/assumptions: Reliable metadata; adequate bracket diversity; CRF estimation within modeled family.
- Education and training (education)
- What: Interactive teaching of camera image formation with interpretable, differentiable modules (exposure, vignetting, white balance, CRF).
- Tools/products/workflows: Classroom demos, labs, and courseware built around PPISP sliders and controller behavior visualization.
- Dependencies/assumptions: Access to radiance field examples and GPU resources for real-time interaction.
Long-Term Applications
- On-device AE/AWB learning and assist (imaging hardware/software)
- What: Deploy controller-like networks as learned auto exposure/white-balance assistants in cameras or capture apps, leveraging physically interpretable constraints.
- Tools/products/workflows: Firmware/ISP integration or mobile app SDKs; hybrid rule-based + learned controllers with metadata priors.
- Dependencies/assumptions: Vendor ISP access; extensive per-device training and validation; energy/latency constraints.
- Fully physical ISP modeling in NVS (software/graphics)
- What: Extend PPISP to spatially adaptive tone-mapping, lens flares/ghosting, local contrast, rolling shutter, and dynamic scenes.
- Tools/products/workflows: Next-gen differentiable ISP stacks; joint optimization with radiance fields for dynamic content and complex optics.
- Dependencies/assumptions: New modules and priors; richer datasets with ground-truth or strong self-supervision; compute for real-time.
- Standardization of metadata and reconstruction protocols (policy/standards)
- What: Define community standards for metadata (EXIF/DNG extensions) and evaluation protocols for NVS under photometric variation.
- Tools/products/workflows: Working groups (academia/industry) to specify metadata schemas and “no-target-pixels” benchmarks with controller prediction.
- Dependencies/assumptions: Cross-vendor alignment; compatibility with privacy and data governance.
- Cross-device appearance management for digital twins and XR (XR/enterprise)
- What: End-to-end capture-to-display color pipelines that preserve intended appearance across devices and lighting contexts.
- Tools/products/workflows: PPISP-like capture normalization + display-aware rendering; studio calibration profiles bundled with twins.
- Dependencies/assumptions: Display calibration; scene-referred color spaces and robust CRF estimation across cameras.
- Telepresence and remote collaboration (communications/XR)
- What: Maintain consistent, natural-looking exposure/white balance across participants and scenes in live 3D telepresence.
- Tools/products/workflows: Real-time controller-driven appearance normalization inside streaming NeRF/point-based telepresence stacks.
- Dependencies/assumptions: Low-latency inference; adaptive handling of dynamic illumination and local tone mapping.
- Large-scale AR cloud mapping and asset fusion (mapping/AR)
- What: Robustly fuse city-scale, crowd-sourced captures from heterogeneous devices by compensating per-device ISP differences.
- Tools/products/workflows: Cloud PPISP services; per-device CRF/vignetting profiles; controller-guided harmonization at scale.
- Dependencies/assumptions: Massive dataset management; scalable training; privacy-preserving metadata handling.
- Synthetic data generation at scale with photometric controls (robotics/auto)
- What: Parameterize photometry to stress-test and improve robustness of perception models to exposure/AWB/CRF shifts.
- Tools/products/workflows: PPISP-based “photometry knobs” in data engines; curriculum/domain randomization for rare lighting.
- Dependencies/assumptions: Task-driven sampling strategies; validation on downstream metrics (detection/segmentation).
- Medical simulation and device consistency (healthcare, research)
- What: Normalize photometric variability across endoscopy/dermatology cameras in simulators and research datasets; generate controlled synthetic views.
- Tools/products/workflows: PPISP-like modules adapted to medical optics and sensors; training simulators for surgical robotics/education.
- Dependencies/assumptions: Specialized optics models and spectra; regulatory validation; domain-specific datasets.
- Insurance and property assessment imaging (insurtech, gov/public sector)
- What: Harmonize heterogeneous captures for reliable visual inspection and automated assessment.
- Tools/products/workflows: PPISP-backed preprocessing in claim assessment platforms; interpretable exposure/color controls for auditors.
- Dependencies/assumptions: Policy acceptance of algorithmic normalization; auditability requirements.
- Long-horizon cultural heritage programs (culture/archives)
- What: Blend multi-decade, multi-device captures of artifacts/sites into consistent digital archives with controllable, documented appearance.
- Tools/products/workflows: Per-device profiles; versioned appearance controls; archival standards for ISP parameter storage.
- Dependencies/assumptions: Stable curation workflows; archival metadata standards.
Notes on feasibility and constraints across applications:
- PPISP is most effective where photometric differences are primarily global and lens-based; it currently does not model strongly spatially adaptive ISP effects (e.g., local tone mapping) or lens flares.
- The controller relies on correlations between scene radiance and camera decisions; manual overrides or extreme lighting may require metadata inputs.
- Accurate camera intrinsics/extrinsics and sufficient multi-view coverage are prerequisites for reliable radiance field reconstruction and subsequent PPISP correction.
- Compute budgets: PPISP adds minimal overhead without the controller (~3%) and moderate overhead with the controller (~26%) relative to rendering on a high-end GPU; real-time deployments must budget accordingly.
Glossary
- 3D exposure neural field: A learned 3D field that assigns exposure values throughout space, enabling exposure-aware rendering. "learn a 3D exposure neural field"
- Affine color transformations: Linear-per-channel color mappings with scale and bias used to correct color/exposure variations. "affine color transformations"
- Auto exposure: A camera control that automatically sets exposure parameters to achieve suitable brightness. "auto exposure and auto white balance"
- Auto white balance: A camera control that automatically adjusts color gains to make neutral surfaces appear gray/white. "auto white balance"
- Bilateral grids (BilaRF): A data structure for efficient edge-aware, intensity–spatial image operations, used here to parameterize per-pixel affine mappings. "bilateral grids (BilaRF)"
- Camera response function (CRF): The nonlinear mapping from sensor irradiance to output pixel values defined by the camera/ISP. "Camera response function (CRF) applies a non-linear transformation from sensor irradiance to image colors."
- Chromatic aberrations: Wavelength-dependent lens distortions causing color fringing at edges. "chromatic aberrations"
- EXIF: Exchangeable Image File Format metadata embedded in images (e.g., exposure, ISO) that can guide processing. "EXIF-derived biases"
- Exposure bracketing: Capturing multiple images at different exposure settings to cover a wide brightness range. "exposure bracketing"
- Exposure compensation: An offset applied to exposure to intentionally brighten or darken an image. "exposure compensation"
- Exposure offset: A per-frame scalar that scales radiance to model variations in shutter, aperture, or gain. "Exposure offset accounts for aperture, shutter time and gain variations,"
- Gamut: The range of colors a device or pipeline can represent; differences between devices can cause color mismatches. "gamut differences between multiple cameras"
- Gamma correction: A power-law nonlinearity applied to image intensities to match perceptual or device characteristics. "gamma correction"
- Generative Latent Optimization (GLO): Low-dimensional per-image latent embeddings optimized to capture appearance variations. "generative latent optimization (GLO) vectors"
- Homogeneous coordinates: A projective-coordinate representation that facilitates linear mappings like homographies. "homogeneous coordinates"
- Homography: A 3×3 projective transform used here to map RG chromaticities and intensity. "homography"
- Huber loss: A robust loss function that is quadratic near zero and linear for large residuals. "Huber loss"
- Image signal processing (ISP): The in-camera pipeline that converts sensor data into final images (demosaicing, tone mapping, etc.). "image signal processing (ISP)"
- LPIPS: A learned perceptual metric that measures image similarity using deep features. "learned perceptual image patch similarity (LPIPS) metrics."
- MCMC: Markov Chain Monte Carlo; here referenced as a configuration choice for optimization. "default MCMC configuration"
- Novel view synthesis (NVS): Rendering views of a scene from unseen camera poses using a learned scene representation. "novel view synthesis (NVS)"
- Optical center: The effective center point of the lens used as a reference for radial effects like vignetting. "optical center"
- Peak signal-to-noise ratio (PSNR): A fidelity metric measuring the ratio between the peak possible signal and reconstruction error. "peak signal-to-noise ratio (PSNR)"
- Photometric consistency: The assumption that corresponding rays across views have consistent appearance absent illumination/camera changes. "photometric consistency assumptions"
- PPISP controller: A learned module that predicts per-frame ISP parameters (exposure, white balance) from rendered radiance. "PPISP controller"
- Radiance field: A function describing color and density throughout 3D space used for view synthesis. "radiance field reconstruction"
- RG chromaticities: Two-dimensional chromaticity coordinates constructed from the red and green channels (with intensity separated). "RG chromaticities"
- Sensor irradiance: The radiant power per unit area reaching the sensor before nonlinear camera mapping. "sensor irradiance"
- Skew-symmetric cross-product matrix: A matrix representation of the cross product used in closed-form homography construction. "skew-symmetric cross-product matrix"
- Spectral response: The wavelength-dependent sensitivity of the sensor affecting color capture. "spectral response"
- SSIM: Structural Similarity Index; a perceptual metric comparing luminance, contrast, and structure. "structural similarity (SSIM)"
- Tone-mapping: A nonlinear mapping (often spatially adaptive) that compresses dynamic range for display. "localized tone-mapping"
- Transmittance: The fraction of light that is not absorbed along a ray through a participating medium. "the transmittance along the ray."
- Vignetting: Radial falloff in image brightness due to lens geometry and optics. "Vignetting models optical attenuation across the sensor,"
- Volumetric density: A scalar field indicating how much a point in space attenuates light along a ray. "volumetric density"
- White balance: Channel gains applied to compensate for illumination color and sensor response. "white balance, which may vary per-frame,"
Collections
Sign up for free to add this paper to one or more collections.