Animated 3DGS Avatars in Diverse Scenes with Consistent Lighting and Shadows
Abstract: We present a method for consistent lighting and shadows when animated 3D Gaussian Splatting (3DGS) avatars interact with 3DGS scenes or with dynamic objects inserted into otherwise static scenes. Our key contribution is Deep Gaussian Shadow Maps (DGSM), a modern analogue of the classical shadow mapping algorithm tailored to the volumetric 3DGS representation. Building on the classic deep shadow mapping idea, we show that 3DGS admits closed form light accumulation along light rays, enabling volumetric shadow computation without meshing. For each estimated light, we tabulate transmittance over concentric radial shells and store them in octahedral atlases, which modern GPUs can sample in real time per query to attenuate affected scene Gaussians and thus cast and receive shadows consistently. To relight moving avatars, we approximate the local environment illumination with HDRI probes represented in a spherical harmonic (SH) basis and apply a fast per Gaussian radiance transfer, avoiding explicit BRDF estimation or offline optimization. We demonstrate environment consistent lighting for avatars from AvatarX and ActorsHQ, composited into ScanNet++, DL3DV, and SuperSplat scenes, and show interactions with inserted objects. Across single and multi avatar settings, DGSM and SH relighting operate fully in the volumetric 3DGS representation, yielding coherent shadows and relighting while avoiding meshing.


Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper is about making animated characters look realistic when placed inside 3D scenes built with a method called 3D Gaussian Splatting (3DGS). The authors focus on two things that often break realism: lighting that doesn’t match the scene, and missing or wrong shadows. They introduce a way for 3DGS avatars to both cast shadows onto the scene and be lit by the scene’s light, so everything fits together visually.
Key Objectives
The paper asks two simple questions:
- How can we make characters cast soft, believable shadows in 3DGS scenes?
- How can we make the character’s shading and color match the lighting of the surrounding environment as they move?
How They Did It (Methods and Analogies)
The paper works entirely within the 3DGS world, where scenes and characters aren’t traditional solid 3D models (meshes). Instead, they’re made from lots of tiny, fuzzy color blobs called “Gaussians.” Think of these like little puffs of colored mist that, when layered properly, form a detailed 3D scene.
Building shadow maps that work for “fuzzy dots”
- Problem: Standard shadow techniques expect solid surfaces. But 3DGS uses fuzzy blobs, so we need a different approach.
- Solution: Deep Gaussian Shadow Maps (DGSM).
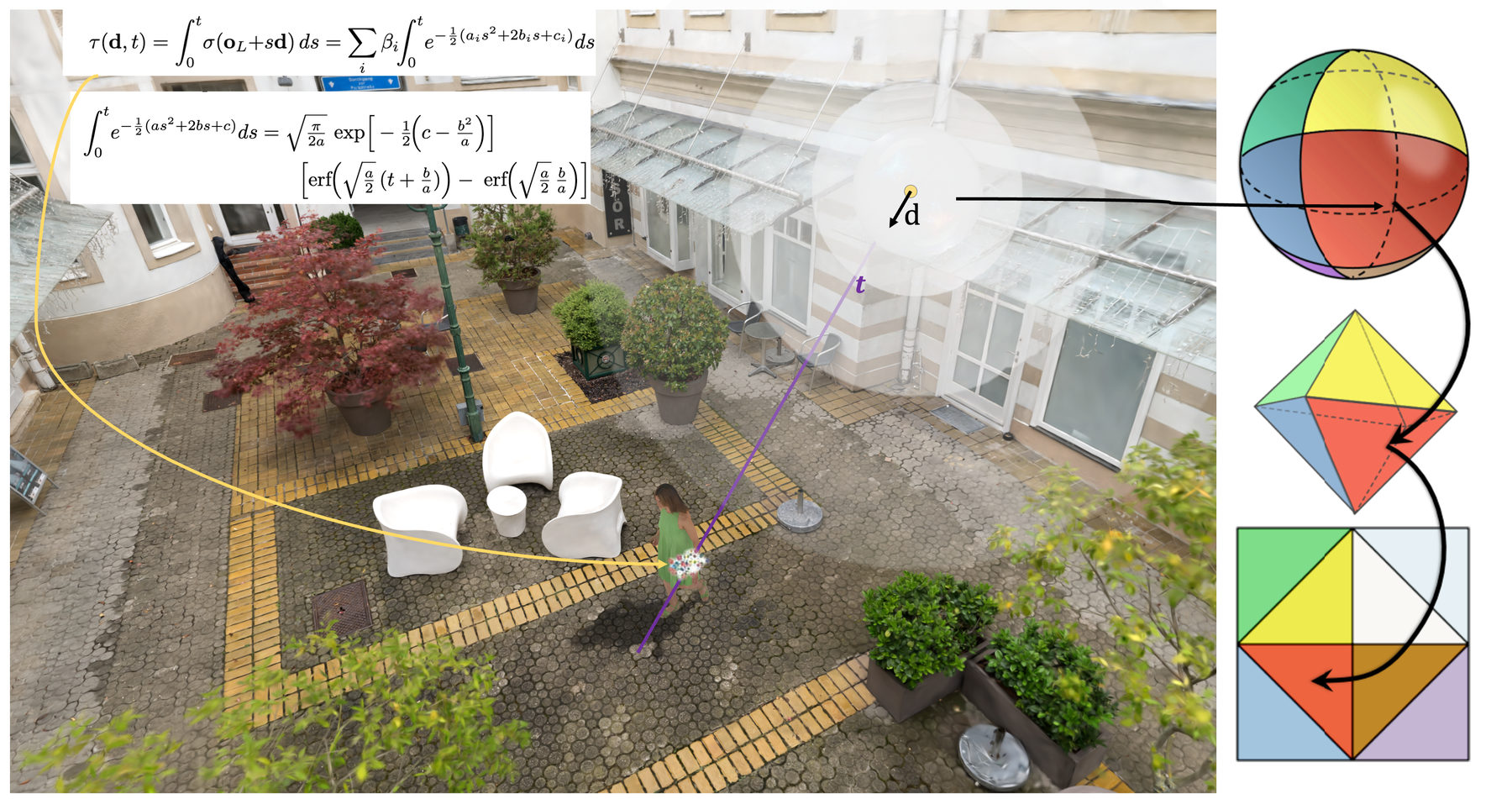
- Imagine a light bulb with many invisible, thin shells expanding outward like the layers of an onion.
- For each shell and each direction from the light, the method computes how much light gets blocked by the character or an inserted object made of these fuzzy dots.
- They store this “how much light gets through” information in a compact 2D map called an octahedral atlas. Picture peeling a sphere (all directions from the light) and flattening it into a single square texture—easy for a graphics card to look up quickly.
- When rendering the scene, each scene blob checks the map to learn how much light reaches it. If less light reaches it, it darkens, creating soft, consistent shadows.
Key idea: Instead of forcing fuzzy blobs into hard surfaces, they use a math shortcut that lets them compute light passing through those blobs directly and efficiently.
Matching the avatar’s lighting to the scene
- Problem: Even with correct shadows, a character can still look “stuck on” if their colors don’t reflect the room’s lighting (for example, warm indoor light vs. cool outdoor light).
- Solution: SH-based relighting using an HDRI probe.
- At the avatar’s location, they capture the environment’s light from all directions (like standing inside a dome and measuring the light).
- They compress this lighting into a small set of numbers using spherical harmonics (SH). Think of SH as a compact recipe describing how light comes in from different directions.
- For each fuzzy blob on the avatar, they quickly adjust its color based on how light should hit it from the environment (like turning the character’s colors slightly warmer or cooler and brighter or dimmer depending on the scene).
- This works per frame, so it keeps up with animation and doesn’t require slow, detailed material estimation.
Making it fast
- They only compute shadows where they matter (near the avatar), and they only consider blobs that could actually affect each shadow pixel. This smart “culling” avoids wasting time.
- Using the octahedral atlas means the GPU can sample shadow information quickly and smoothly without seams.
Main Findings and Why They’re Important
- Consistent shadows: Avatars and inserted objects cast soft, view-consistent shadows onto 3DGS scenes, and scene blobs are darkened correctly when light is blocked.
- Matching lighting: The avatar’s shading and color shift to match the scene’s illumination, making them blend in better.
- Works across different setups: Single avatars, multiple avatars, and avatar–object interactions all looked coherent in diverse datasets and environments.
- Speed and quality:
- The special atlas and smart culling made shadow map building much faster.
- Better sampling around each blob produced smoother, more accurate penumbrae (the soft parts of shadows).
- User studies showed viewers preferred the results for realism and lighting/shadow quality.
- No meshes needed: Everything happens in the 3DGS world, so there’s no time-consuming conversion to traditional 3D models.
These results matter because they solve two core realism problems—lighting match and shadowing—while keeping things fast enough for animation and interaction.
Implications and Potential Impact
This approach can improve:
- Virtual production and video compositing: Characters can be inserted into real or captured 3D scenes and look like they belong there.
- AR, VR, and games: Animated avatars will have believable lighting and shadows that match the environment.
- Robotics and simulation: More realistic lighting/shadows can help test perception systems in lifelike scenes.
Limitations and future directions:
- It assumes mostly static scenes around the lights and uses a single-scattering approximation, so complex shiny reflections or light bouncing may be simplified.
- Future work could handle changing lights, deforming environments, glossy materials, and learned global illumination, all within the 3DGS framework.
In short, the paper introduces a practical, fast way to give 3DGS avatars proper shadows and environment-matched lighting, making them look much more realistic without switching away from the 3DGS representation.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, concrete list of what remains missing, uncertain, or unexplored in the paper, framed to guide actionable future research.
- Dynamic illumination and scenes: The method assumes static scenes around lights and fixed illumination; it does not support moving/temporal lights, flickering, or deforming environments, nor quantify how DGSM updates should be adapted for dynamic lighting.
- Area/extended light sources: Light estimation yields point lights; handling area lights or large emissive regions and their characteristic penumbrae is not addressed, beyond softening caused by Gaussian extent.
- Light-estimation robustness: The heuristic, SH-driven light-selection pipeline lacks quantitative validation against ground-truth lighting, sensitivity analysis to noise, and guarantees across diverse 3DGS scenes that may not store SH coefficients.
- Dependence on scene SH availability: The approach relies on per-Gaussian SH coefficients “provided” by scenes; it remains unclear how to estimate lights reliably when only per-Gaussian RGB colors are available (as in many 3DGS reconstructions).
- DGSM correctness bounds: Light-space footprint culling is conservative but unproven; formal error bounds for missed occluders (especially near lights or with extreme anisotropy/scale) are not given.
- Alpha-to-absorption calibration: The mapping from 3DGS opacity to volumetric absorption is heuristic (global κ and trace-based normalization); a principled derivation, data-driven calibration, or automatic per-scene tuning is missing.
- Avatar shadow reception: The paper modulates scene Gaussians via DGSM but does not clearly demonstrate avatars receiving shadows from scene occluders or from self-occlusion; define and evaluate a procedure for shadowing avatar Gaussians consistently.
- Occlusion-aware relighting: The SH HDRI probe uses radiance from a cubemap without modeling local visibility/occlusion (i.e., irradiance with a visibility term); this can misestimate indoor lighting and fails to capture shadowing in relighting.
- Material/BRDF realism: Per-Gaussian color scaling with a cosine/glossy lobe ignores material parameters, view dependence, specular highlights, and roughness variations; a learned or estimated per-Gaussian BRDF remains open.
- High-frequency lighting detail: Low-order SH fits cannot capture sharp lighting features, glints, or high-frequency environment maps; the impact of higher-order SH, mixture bases, or wavelets is unexplored.
- Normal estimation reliability: Pseudo-normals from PCA or ellipsoid axes may be unstable or misaligned on sparse/noisy splats; quantify how normal quality affects relighting and propose robust normal recovery for 3DGS avatars.
- Energy consistency: The separation between “direct term” attenuation (DGSM) and SH-based relighting risks double counting or energy mismatch; a physically consistent combination rule is not established or validated.
- Global illumination: Single-scattering transmittance excludes interreflections, color bleeding, and caustics; integrating learned or approximated multi-bounce GI within 3DGS remains an open direction with no baseline comparisons.
- Participating media and translucency: Volumetric scattering/absorption in fog, smoke, or translucent materials is not modeled; extending DGSM to participating media and subsurface effects is unaddressed.
- Resolution/aliasing trade-offs: The octahedral atlas discretization (H×W, K bins) and trilinear sampling may cause aliasing or blurring; criteria to select resolutions, MIP levels, or anisotropic filtering are not given.
- Memory and scalability: DGSM storage scales linearly with the number of lights (K×H×W per light); memory/compute footprints for multi-light, multi-avatar scenes on consumer GPUs and strategies for compression are unreported.
- Runtime and real-time constraints: Reported DGSM build times (~0.13 s/frame with culling) are above 24 fps budgets and exclude multi-light scenarios; achieving sustained 24–60 fps with multiple lights and high-resolution atlases remains open.
- Multi-avatar interactions: Cross-shadowing and color interactions among several avatars are shown qualitatively but lack quantitative analysis of scalability, conflicts, and temporal stability under complex motions.
- Temporal stability: The per-frame SH probe and DGSM updates may induce flicker; no metrics or methods (e.g., temporal regularization of SH coefficients or DGSM accumulation) are provided to ensure temporal coherence.
- Scene editing robustness: The pipeline’s behavior under large scene edits (moving props, removing walls, adding emissive objects) is not characterized; incremental DGSM updates or on-the-fly atlas re-tiling strategies are absent.
- Comparison baselines: There is no quantitative comparison to ray-traced GS variants or mesh-based deep-shadow methods under matched settings; accuracy/speed trade-offs versus established techniques remain unclear.
- Evaluation breadth and GT: Lighting-consistency metrics are proxy-based, shadow evaluation uses mesh pseudo-GT, and perceptual study is small-scale; broader datasets, stronger GT, and task-specific metrics (e.g., shadow hardness, light direction accuracy) are needed.
- Probe placement strategy: The HDRI probe is built at the avatar location; guidance for optimal probe placement, multi-probe blending, and handling large environments with spatially varying illumination is missing.
- Thin geometry and leakage: Volumetric 3DGS can suffer light leakage through thin/open structures; failure-case analysis and remedies (e.g., adaptive absorption scaling or visibility clamping) are not explored.
- End-to-end differentiability: Although suggested as future work, no formulation is provided for differentiable light estimation, DGSM construction, and avatar appearance learning, nor for joint training objectives.
- Reproducibility: Implementation details (e.g., κ tuning, atlas resolutions, SH order, sampling parameters) and code/data availability are not specified; reproducible guidelines for deploying the pipeline across new scenes are needed.
Practical Applications
Immediate Applications
The following items outline near-term, deployable uses that can be implemented with current 3D Gaussian Splatting (3DGS) pipelines, commodity GPUs, and off-the-shelf capture workflows.
- Photoreal CG compositing with 3DGS assets
- Sectors: media/entertainment, VFX, virtual production, advertising.
- What: Insert animated 3DGS human avatars and dynamic props into captured 3DGS sets with view-consistent soft shadows and scene-matched shading; use DGSM for shadowing and per-Gaussian SH relighting for exposure and color cast alignment.
- Tools/products/workflows: a
DGSMmodule forNerfstudio/3DGS pipelines; anUnreal/Unitybridge that renders 3DGS layers with an octahedral shadow atlas; a compositor node that takes 3DGS scene, estimated lights, and avatar 3DGS and outputs shadowed, relit layers. - Assumptions/dependencies: scenes and inserts are 3DGS; local lighting is quasi-static; GPU with texture sampling and trilinear interpolation; light estimation from scene SH is stable; single-scattering/SH approximations are acceptable (no caustics or strong interreflections).
- Mobile AR lenses with realistic avatar lighting and ground-contact shadows
- Sectors: social media, AR/VR consumer apps, marketing.
- What: Capture a small 3DGS proxy of the user’s room and insert a performer/avatar whose shading matches the environment and who casts soft shadows onto nearby surfaces.
- Tools/products/workflows: a
Snap Lens Studiomodule for SH-probe estimation at the avatar location and precomputed per-light DGSM atlases; on-device ROI/culling to bound costs; fallback to fewer radial bins K on mobile. - Assumptions/dependencies: compact 3DGS capture (room-scale) available; shadows restricted to a receiver ROI around the avatar; performance budget met via culling (paper shows ≈0.13 s/frame DGSM build on A100 with ROI—mobile requires tighter budgets or precompute).
- Photogrammetry-driven game and virtual-tour content with plausible dynamic character shadows
- Sectors: games, virtual tours, digital twins for AEC/real estate.
- What: Drop animated guides/NPCs into 3DGS reconstructions of levels or indoor spaces; DGSM provides soft shadows onto 3DGS floors/walls; SH-probe relighting harmonizes character color with environment.
- Tools/products/workflows: DGSM baking per dominant light for static scenes; runtime sampling per receiver Gaussian; exporter that packages octahedral shadow atlases with the scene.
- Assumptions/dependencies: mostly static illumination; 3DGS used as a primary representation or as a background layer; limited glossy/specular fidelity.
- Robotics and AV simulation in captured (3DGS) environments with physically plausible occlusion cues
- Sectors: robotics, autonomous driving, synthetic data.
- What: Insert dynamic agents/robots into 3DGS digital twins; cast/receive soft shadows to provide realistic visual cues for training and evaluation (e.g., for vision models sensitive to shading/occlusion).
- Tools/products/workflows: dataset generator that composites agents into ScanNet++/DL3DV/SuperSplat scenes, producing shadow-only passes and fully composited frames; hooks to vary light configurations.
- Assumptions/dependencies: agents and scenes available as Gaussians or converted; point-light estimates credibly approximate indoor lights; single-bounce shadows suffice for perception tasks.
- Virtual staging and try-before-you-buy content
- Sectors: e-commerce (furniture, apparel), real estate.
- What: Insert 3DGS furniture/avatars into a captured 3DGS room so that color cast and shadows match the space, improving buyer confidence and reducing return rates.
- Tools/products/workflows: SaaS “virtual staging” plug-in that computes a local SH HDRI probe per placement and a DGSM slab for floor/wall receivers; export shadow mattes and relit object renders.
- Assumptions/dependencies: consumer-grade 3DGS room capture; stable point-light estimation; static layouts during preview.
- Educational demos and training content with higher realism at interactive rates
- Sectors: education/training, museums.
- What: Interactive lessons in scanned lab/classroom spaces with avatars or props that visually “belong” (matching lighting and shadows).
- Tools/products/workflows: classroom- or exhibit-scale 3DGS scenes; precomputed DGSM per exhibit light; kiosk app with GPU sampling of DGSM atlas.
- Assumptions/dependencies: controlled lighting; limited need for glossy materials/participating media.
- Research baselines and evaluation toolkits for lighting consistency in 3DGS
- Sectors: academia/industrial research.
- What: Use the paper’s metrics (PAA–Y, APF–Y, NCM–ab) as standard diagnostic measures; generate “pseudo-GT” shadow maps from meshes to benchmark 3DGS shadowing.
- Tools/products/workflows: open-source
DGSMreference implementation; metric scripts; reproduction configs for ScanNet++/DL3DV/SuperSplat + AvatarX/ActorsHQ. - Assumptions/dependencies: access to mesh counterparts (for pseudo-GT), or shared evaluation subsets; agreement on SH order and neighborhood radius for metrics.
- Compliance and UX guidance for scene capture in consumer apps
- Sectors: policy/compliance, product.
- What: Provide in-app notices and consent flows when capturing indoor spaces for 3DGS; on-device processing preferences to reduce privacy risk.
- Tools/products/workflows: capture consent templates; data retention controls; disclosure that synthetic lighting/shadows are applied in ads or sponsored content.
- Assumptions/dependencies: organizational adoption; regional privacy laws (e.g., handling of bystanders/PII in scans).
Long-Term Applications
These opportunities require further research, scaling, or ecosystem maturation (e.g., standards, hardware acceleration, end-to-end differentiability, dynamic illumination).
- Real-time XR with dynamic illumination and deforming environments
- Sectors: AR/VR/MR, live events, broadcast.
- What: Support moving lights, time-of-day changes, and dynamic props that both cast and receive shadows in 3DGS; synchronize across multiple users/views.
- Tools/products/workflows: streaming
DGSMupdates with aggressive ROI/culling; distributed SH-probe estimation and synchronization; mixed raster–splat or ray–splat hybrids for specular transport. - Assumptions/dependencies: learned/analytic multi-bounce approximations; hardware acceleration on headsets/phones; efficient rebuilds under moving lights.
- Global-illumination-aware 3DGS (beyond single scattering)
- Sectors: VFX/games/research.
- What: Integrate learned or analytical GI within 3DGS to capture interreflections, glossy/anisotropic BRDFs, and participating media.
- Tools/products/workflows: differentiable DGSM + SH pipelines; neural radiance transfer operators for Gaussians; temporal caches for indirect light.
- Assumptions/dependencies: robust material/BRDF estimation for Gaussians; memory- and compute-efficient GI approximations; new datasets with controlled lighting.
- City-scale digital twins with dynamic agents and environment-aware training
- Sectors: smart cities, autonomous driving, robotics.
- What: Outdoor 3DGS digital twins with sun/sky models, vehicles, and crowds whose shadows and shading evolve consistently across large areas.
- Tools/products/workflows: hierarchical DGSM tiling and LOD; sun/sky SH probes; cloud build services; integration with simulation stacks (e.g., scenario generators).
- Assumptions/dependencies: scalable light estimation outdoors (HDR sky capture or learned models); memory-lean atlases; handling of vegetation and specular glass.
- Standardization of 3DGS lighting/shadow assets
- Sectors: software/tooling, content pipelines.
- What: Extend
USD/glTFwith 3DGS nodes and attachable octahedral shadow atlases, SH probes, and ROI metadata to enable interchange across DCCs/engines. - Tools/products/workflows: reference schema for “Gaussian volumes,” DGSM texture conventions, and probe metadata; import/export from major DCCs and engines.
- Assumptions/dependencies: community/industry buy-in; open specifications and conformance tests.
- Telepresence/volumetric video with environment-consistent avatars
- Sectors: communications, enterprise collaboration.
- What: People captured as 3DGS streams inserted into remote 3DGS rooms with consistent lighting and contact shadows for presence and depth cues.
- Tools/products/workflows: low-latency SH probe updates; incremental DGSM refresh; compression for Gaussians + atlases.
- Assumptions/dependencies: robust, real-time 3DGS capture; networked synchronization; privacy-preserving transmission.
- Healthcare and high-stakes training sims with photoreal lighting cues
- Sectors: healthcare, defense/emergency response.
- What: Patient-/facility-specific 3DGS sims where tools/avatars interact under realistic shadows to improve depth perception and task training.
- Tools/products/workflows: validated lighting models; scenario authoring tools; mixed reality overlays in clinical spaces.
- Assumptions/dependencies: stringent validation and regulatory acceptance; accurate material/light characterization (beyond Lambertian SH).
- Labeled synthetic data and audit trails for synthetic media policy
- Sectors: policy/compliance, platforms.
- What: Standardized metadata indicating environment lighting provenance (e.g., SH coefficients, DGSM build parameters) to support disclosure, watermarking, and audit.
- Tools/products/workflows: pipeline-level logs of light sources, SH probes, and atlas hashes; verifiable manifests embedded in asset packages.
- Assumptions/dependencies: emerging norms for synthetic-content labeling; platform support for ingestion and verification.
- Cloud “Lighting-as-a-Service” for 3DGS
- Sectors: developer tooling, SaaS.
- What: APIs that accept a 3DGS scene + inserted assets and return relit renders, shadow atlases, and shadow mattes for compositing.
- Tools/products/workflows: server-side DGSM builders with ROI/culling; batch processing; SDKs for DCCs and mobile apps.
- Assumptions/dependencies: cost-effective GPU backend; secure handling of user scene captures; export/import compatibility across ecosystems.
- End-to-end differentiable training that unifies light estimation, DGSM, and appearance
- Sectors: research/enterprise R&D.
- What: Jointly optimize light positions/intensities, DGSM parameters, and per-Gaussian appearance to improve stability under motion and edits.
- Tools/products/workflows: differentiable octahedral atlas sampling; gradient-friendly opacity→absorption mappings; temporal regularizers for probes/shadows.
- Assumptions/dependencies: stable gradients in presence of culling/ROI; datasets with varied motion/lighting; compute for large-scale training.
Common assumptions and dependencies across applications
- Representation: assets are available or convertible to 3DGS with per-Gaussian opacity and (optionally) SH color.
- Lighting: a small number of dominant lights can be estimated; local illumination near the avatar is approximable by low-order SH.
- Physics: single-scattering shadow approximation; limited handling of highly specular/anisotropic materials or participating media.
- Performance: practical throughput hinges on ROI and light-space culling and on the size of the K×H×W octahedral atlas; mobile scenarios likely need precomputation or lower fidelity.
- Scale/units: correct scene scale improves light falloff and shadow softness; instability in scale or camera intrinsics may degrade results.
- Data/ethics: capturing indoor spaces raises privacy and licensing issues; disclosures may be needed when synthetic lighting/shadows are used in ads or editorial content.
Glossary
- 3D Gaussian Splatting (3DGS): An explicit, volumetric scene representation using 3D Gaussian primitives rendered by splatting. "We present a method for consistent lighting and shadows when animated 3D Gaussian Splatting (3DGS) avatars interact with 3DGS scenes"
- Alpha‑weighted centroid: A centroid computed with weights from alpha (opacity), used to localize processing around a subject. "We first center an ROI around the character’s alpha-weighted centroid"
- Anisotropic 3D Gaussians: Gaussians with direction‑dependent covariance, capturing elongated or oriented volumetric shapes. "for scenes and characters or inserted objects represented by anisotropic 3D Gaussians."
- BRDF (Bidirectional Reflectance Distribution Function): A function describing how light is reflected at a surface as a function of incident and outgoing directions. "avoiding explicit BRDF estimation or offline optimization."
- Caustics: Concentrations of light formed by reflection or refraction producing bright patterns. "The single-scattering approximation may miss strong interreflections, caustics, or highly specular/anisotropic effects."
- Chromaticity: The color quality independent of luminance, often represented as coordinates like a* and b* in CIE Lab. "keep chromaticities "
- CIE Lab: A perceptual color space separating luminance (L*) and chromaticity (a*, b*). "We convert and to CIE--Lab"
- Cosine lobe: A shading kernel proportional to the cosine of the angle between light direction and surface normal, used for diffuse (Lambertian) lighting. "A cosine lobe "
- Cubemap: A six‑face texture representing directional data on the sphere for environment capture and lighting. "We render a cubemap at the avatar location"
- DC‑dominance prior: A heuristic favoring the zero‑order (constant) component in spherical harmonic lighting estimates. "and a DC-dominance prior"
- Deep Gaussian Shadow Maps (DGSM): A volumetric deep‑shadow map tailored to 3DGS with closed‑form transmittance and atlas storage for efficient sampling. "Deep Gaussian Shadow Maps (DGSM)—a modern analogue of the classical shadow mapping algorithm tailored to the volumetric 3DGS representation."
- Deep shadow maps: Shadow representations that store transmittance along light rays to handle semi‑transparent and volumetric occluders. "Building on the classic deep‑shadow mapping idea"
- Earth Mover’s Distance (EMD): A measure of distribution distance equivalent to the 1‑Wasserstein metric. "where is the 1--Wasserstein distance"
- Error function (erf): The Gaussian integral primitive used to express closed‑form solutions for accumulated transmittance. "$\mathrm{erf}\!\Big(\sqrt{\tfrac{a}{2}\,(t+\tfrac{b}{a})\Big)$"
- Footprint sampling: Sampling a small spatial neighborhood of a receiver to account for its extent and reduce aliasing. "The footprint MC sampling respects the Gaussian’s spatial extent, reducing aliasing/ringing on thin occluders and producing smoother penumbrae."
- Glossy lobe: A specular lighting kernel approximating shiny reflections, often a higher‑order cosine power. "contract the target environment with a cosine (or glossy) lobe"
- Non‑Maximum Suppression (NMS): A selection heuristic suppressing nearby lower‑score candidates to keep distinct peaks. "Finally, we select k lights via greedy distance-based NMS suppression"
- HDRI (High Dynamic Range Imaging): High‑dynamic‑range environment representation for lighting probes. "approximate the local environment illumination with HDRI probes represented in a spherical‑harmonic (SH) basis"
- Huber loss: A robust loss function that is quadratic near zero and linear for large errors, used in fitting. "apply Huber-loss fitting with trimming"
- Irradiance: Incident light power per unit area on a surface, often modeled with spherical harmonics for diffuse lighting. "We model irradiance with real spherical harmonics (SH) of order "
- Lambertian: An ideal diffuse BRDF where reflected intensity is proportional to the cosine of the incidence angle. "(Lambertian when )"
- Light‑space culling: Pruning occluders using their projected footprints in the light’s tangent plane to accelerate shadow computations. "Occluder culling via light‑space footprints."
- Monte Carlo sampling: Randomized sampling technique to estimate integrals or averages efficiently. "By default we use Monte Carlo sampling."
- Octahedral atlas: A single 2D texture parameterization of the sphere via an octahedral mapping, enabling seamless directional storage. "Directions on are encoded with an octahedral atlas"
- Optical depth: Accumulated attenuation along a ray, with transmittance given by its exponential. "Let be the optical depth implied by the 3DGS image formation model."
- Penumbrae: The soft transition regions at shadow edges due to finite light size or partial occlusion. "producing smoother penumbrae."
- Precision matrix: The inverse of a covariance matrix, parameterizing Gaussian shape and anisotropy conveniently. "precision "
- Pseudo‑GT (Pseudo‑ground truth): A surrogate ground truth constructed by an alternative method to enable evaluation. "Pseudo-GT from meshes."
- Radiance transfer: The process of mapping environment radiance to object appearance via a lighting kernel per element. "apply a fast per‑Gaussian radiance transfer"
- Region of interest (ROI): A bounded spatial subset where computation is focused for efficiency. "Receiver‑driven region of interest (ROI)."
- Ridge least‑squares: A regularized linear least‑squares fitting (L2 penalty) used to estimate spherical harmonic coefficients. "a weighted ridge least-squares problem"
- SMPL mesh: A parametric 3D human body model commonly used to represent posed human geometry. "we use mesh based pseudo GT shadow maps for evaluation. We replace the avatar Gaussians with the posed SMPL mesh"
- Spherical harmonics (SH): Orthogonal basis functions on the sphere used to represent low‑frequency lighting efficiently. "represented in a spherical‑harmonic (SH) basis"
- Splatting: Rendering technique that rasterizes point or volumetric primitives by spreading their footprint over pixels. "rasterizing them into images using splatting"
- Transmittance: The fraction of light that passes through occluding media along a ray. "We tabulate transmittance over concentric radial shells"
- Trilinear interpolation: Interpolation across three dimensions (e.g., 2D atlas plus radial bins) on the GPU. "and sample it with GPU trilinear interpolation."
- Volumetric: Pertaining to continuous 3D media without explicit surfaces, enabling semi‑transparent and soft shadow effects. "enabling volumetric deep-shadow computation directly in the Gaussian domain"
- Wasserstein distance: Optimal transport metric measuring cost to morph one distribution into another; the 1‑Wasserstein equals EMD. "the 1--Wasserstein distance on "
Collections
Sign up for free to add this paper to one or more collections.

