- The paper introduces a self-reflective VLA model that uses counterfactual reasoning to dynamically revise and improve driving actions.
- It employs a rollout-filter-label pipeline to identify critical scenarios and iteratively refine trajectory plans.
- Experimental findings demonstrate a 17.6% improvement in trajectory accuracy and a 20.5% increase in safety metrics.
Overview of Counterfactual VLA
The paper "Counterfactual VLA: Self-Reflective Vision-Language-Action Model with Adaptive Reasoning" (2512.24426) introduces a novel framework, Counterfactual Vision-Language-Action (CF-VLA), aiming to enhance autonomous driving systems through self-reflective reasoning. Unlike traditional Vision-Language-Action (VLA) models that descriptively report observations and intended actions, CF-VLA integrates counterfactual reasoning to actively critique and revise its planned actions. This enables the system to preemptively simulate and amend potential unsafe or undesirable trajectories before execution, enhancing trajectory accuracy and driving safety.
Methodology
Self-Reflective Reasoning Architecture
CF-VLA distinguishes itself by embedding a self-reflective reasoning loop directly within the VLA framework. The system first predicts language-based meta-actions, which summarize intent across dimensions such as longitudinal, lateral, and lane-level driving actions. These meta-actions undergo a counterfactual reasoning process where the model interrogates the consequences of following its current plan, thereby enabling dynamic revisions when necessary. By transforming one-shot descriptive reasoning into causal self-correction signals, CF-VLA fosters a proactive adjustment mechanism that refines action plans based on the model’s understanding of scene complexity and risk.
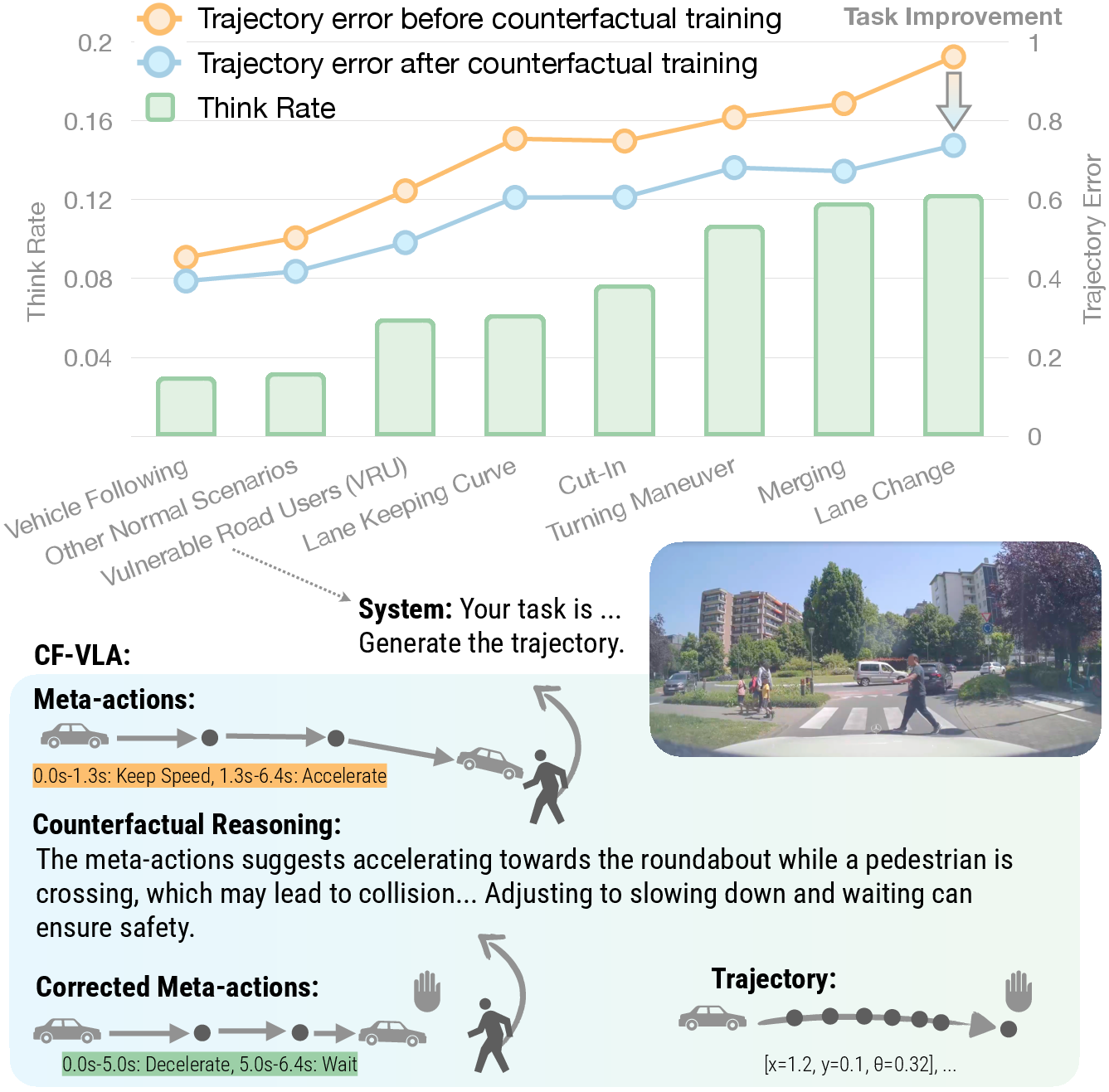
Figure 1: A comparison of the learning behavior of CF-VLA in different scenarios.
Rollout-Filter-Label Pipeline
To operationalize self-reflective capabilities, CF-VLA employs a rollout-filter-label pipeline. This innovative approach consists of generating meta-actions through model rollouts, identifying critical scenes where pre-filling ground-truth meta-actions significantly improves trajectory quality, and labeling these cases with counterfactual reasoning traces. This pipeline allows CF-VLA to curate valuable training instances that expose weaknesses in initial plan proposals, thus promoting continuous improvement through multi-round training.

Figure 2: Framework of CF-VLA integrating the rollout-filter-label pipeline.
Adaptive Reasoning
CF-VLA demonstrates adaptive reasoning, selectively engaging counterfactual thinking in complex or challenging scenarios. By concentrating resources on scenes with higher trajectory errors, CF-VLA optimizes computational efficiency and enhances task performance without unnecessary reasoning in straightforward contexts.
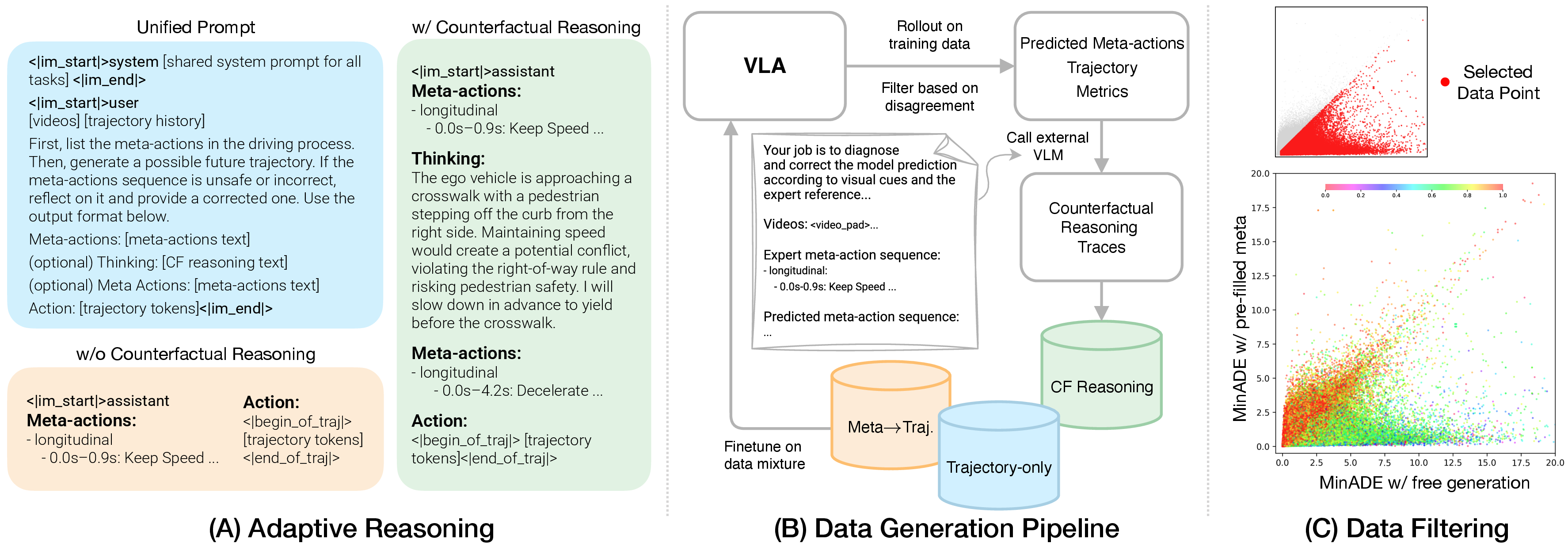
Figure 3: Data generation process using the rollout-filter-label pipeline.
Experimental Validation
Extensive experiments conducted on a large-scale driving dataset validate the efficacy of CF-VLA in improving trajectory accuracy by up to 17.6% and enhancing safety metrics by 20.5%. By comparing against baseline models that lack reflective capacities, CF-VLA consistently outperforms in trajectory metrics, behavioral safety, and reasoning quality.
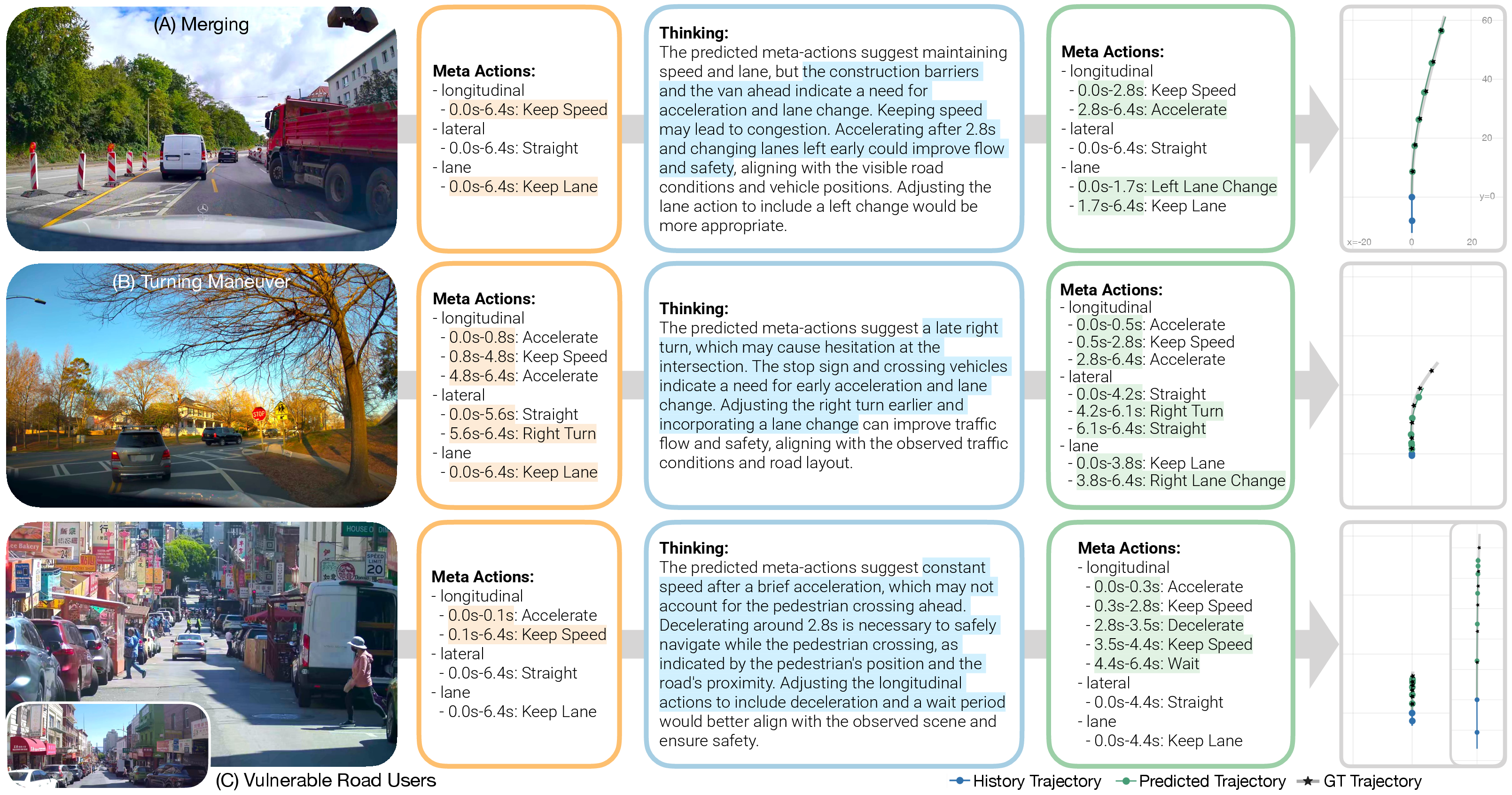
Figure 4: Qualitative results of CF-VLA in safety-critical scenarios.
The model's ability to iteratively refine its reasoning through multi-round training underscores its robustness, achieving superior performance while maintaining manageable test-time compute overhead. CF-VLA's adaptive reasoning further enables it to allocate computational resources optimally, reasoning more frequently in high-risk scenarios where benefits are maximized.
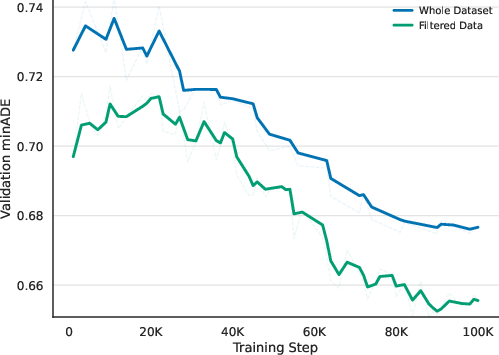
Figure 5: Validation of CF-VLA's adaptive reasoning capability.
Implications and Future Directions
Practical Impact
The integration of self-reflective reasoning within autonomous systems marks a significant advancement in addressing safety and efficiency challenges. CF-VLA's proactive stance in trajectory planning offers a promising pathway towards more reliable and human-consistent autonomous driving.
Theoretical Significance
CF-VLA's introspective approach extends beyond traditional external validation methods, showcasing the potential for VLA models to harness internal reasoning loops that are analogous to the self-reflection observed in purely language-based models. This opens new avenues for developing models that not only describe but critically assess and improve their decision-making processes.
Future Research
Further work could explore how CF-VLA's principles can be applied to other domains where autonomous systems interact with complex environments, such as robotics and intelligent transportation systems. Additionally, enhancing the model’s ability to understand and predict long-term consequences of actions within intricate scenarios remains a promising direction for future research.
Conclusion
Counterfactual VLA (CF-VLA) significantly contributes to the evolution of autonomous driving technologies by embedding self-reflective reasoning capabilities directly within its framework. The model enhances trajectory planning through counterfactual analysis, demonstrating substantial improvements in accuracy and safety metrics. By learning to think proactively before executing actions, CF-VLA represents a progressive step towards autonomous systems that are both self-aware and highly adaptive.


