- The paper introduces a hybrid framework that integrates decentralized path planning with centralized conflict resolution, reducing deadlocks in multi-robot systems.
- The paper demonstrates that the hybrid approach improves the success rate from 81% to 96% in simulations involving up to eight robots.
- The paper validates the framework through real-world experiments on quadruped and Duckiebot platforms, showcasing enhanced scalability and efficiency.
Virtual Traffic Lights for Multi-Robot Navigation: Decentralized Planning with Centralized Conflict Resolution
Introduction and Hybrid Framework Overview
The paper presents a hybrid framework that deftly integrates decentralized path planning with centralized conflict resolution for multi-robot coordination. This hybrid approach is developed to circumvent the limitations associated with purely centralized or decentralized approaches in multi-agent navigation systems. The centralized system functions more like a virtual traffic light, intervening only to prevent potential conflicts among robots. By enabling autonomous path planning at the individual robot level and utilizing centralized intervention solely for conflict detection and resolution, this framework targets increased scalability and robustness without compromising the efficiency inherent in centralized strategies.
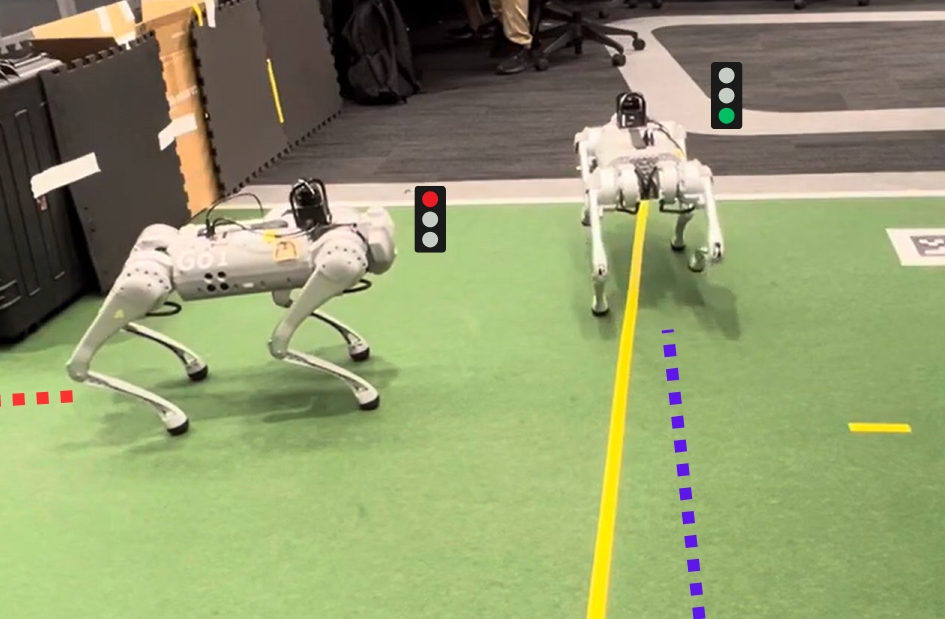
Figure 1: Our hybrid system combines decentralized planning with centralized conflict resolution. To prevent a deadlock, a central node issues a virtual red light to the quadruped on the left, allowing the other robot to pass safely through the conflict zone.
System Design and Conflict Resolution Mechanism
The proposed system architecture uses a decentralized planning model, allowing each robot to autonomously plot its trajectory. The robots share these planned paths with a centralized node responsible for detecting potential intersections or conflicts. Once a conflict is predicted, the central node issues commands akin to "Stop" alerts, managing which robot should proceed. This centralized yet non-prescriptive control mechanism allows for increased proficiency in mitigating deadlocks without overtly complicating the path planning process or heavily taxing computational resources.
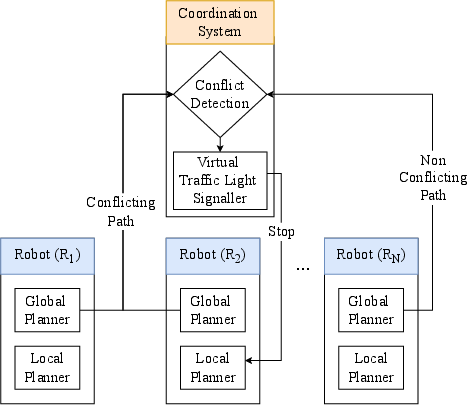
Figure 2: System overview with N robots, where only robots R1 and R2 have a conflicting path. The centralized coordination system allows R1 to proceed and halts R2 until R1 has navigated through the conflicting intersection.
The paper details exhaustive simulations, totaling 1,000 runs varying the number of robots, to benchmark the performance of this hybrid framework against a decentralized baseline. Key performance indicators include success rate, speed, and number of replans, presented across different scenarios with varying robot densities. The hybrid system displayed superior performance, notably reaching a 96% success rate with eight robots compared to the decentralized system’s 81%. The hybrid framework managed to strike an optimal balance between speed and successful path completion, particularly evident in less densely packed scenarios.
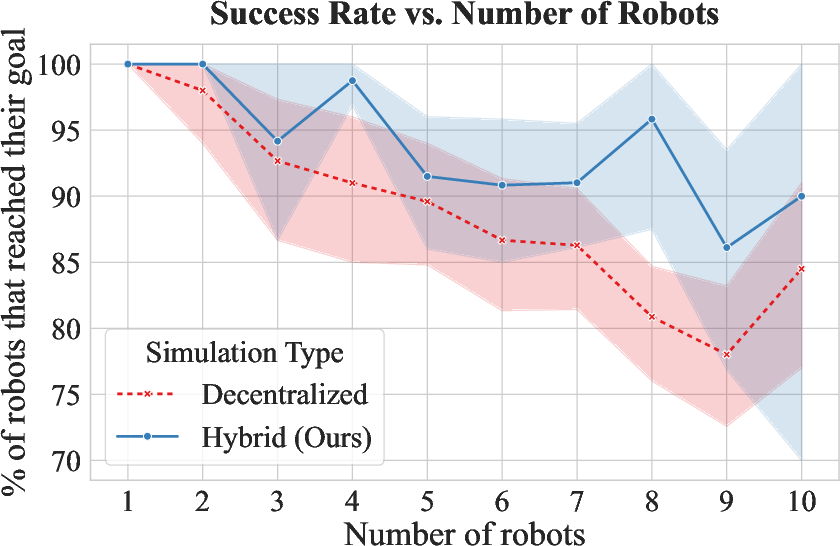
Figure 3: Average success rate (percentage of robots reaching their goal within a 135s timeout) for the Hybrid and Decentralized systems versus the number of robots. Each point is the mean over 500 trials; shaded regions represent the 95% confidence interval.
Practical Demonstrations
The practical application of the hybrid framework was validated through real-world experiments using distinct robotic platforms, including quadruped robots and wheeled Duckiebots. These demonstrations reinforced the system's adaptability across different robotic configurations and environments. In scenarios with pre-defined intersections, the system effectively managed first-come, first-served traffic flows, showcasing its real-world viability for structured environments.
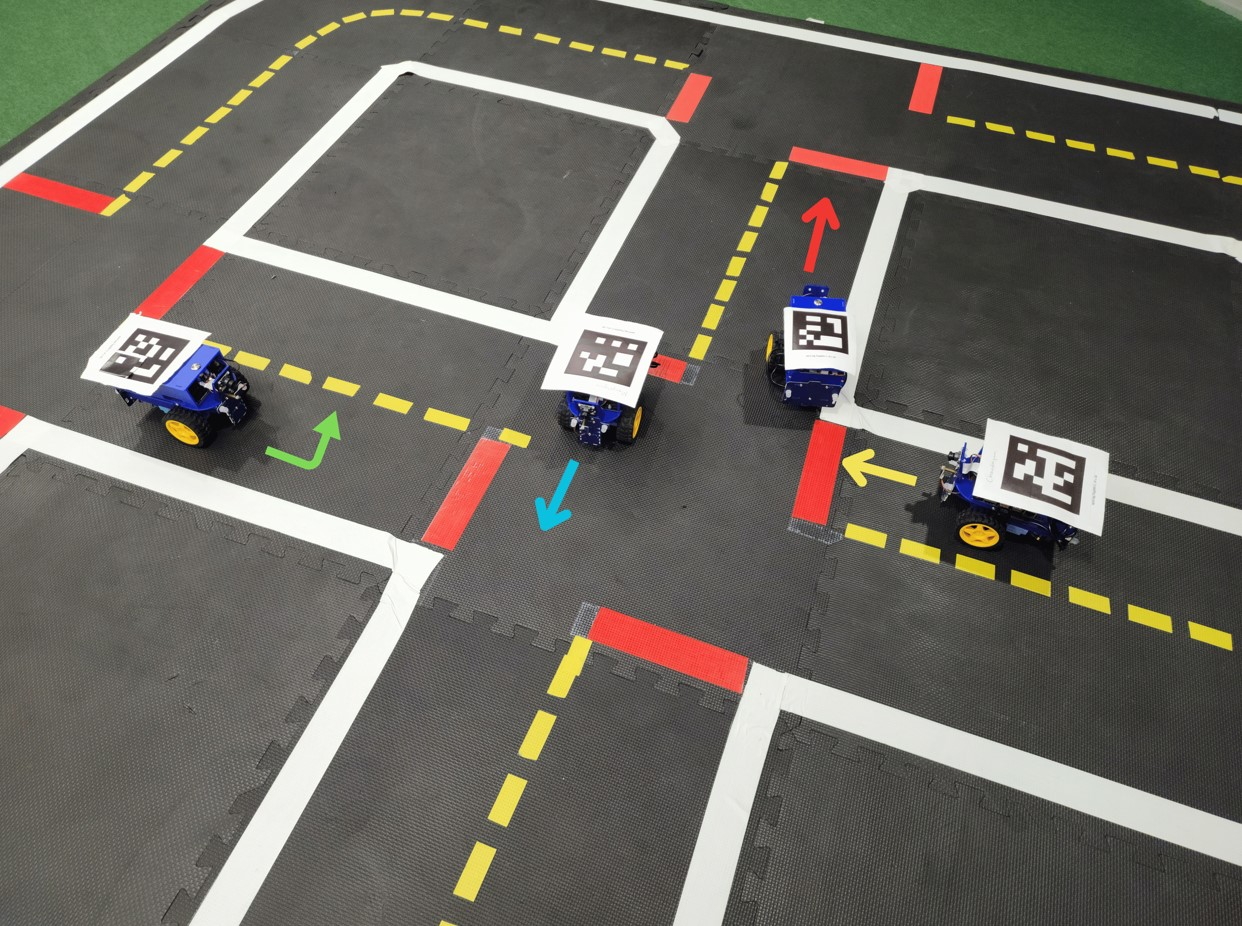
Figure 4: The hybrid system manages a pre-defined intersection with four Duckiebots on a first-come, first-served basis, with arrows indicating turn intentions. The first robot to arrive (red arrow) passes straight, followed in sequence by the blue and yellow robots. The last to arrive (green arrow) is cleared to make its left turn only after the intersection is vacant.
Conclusion and Future Work
The paper outlines a versatile hybrid coordination framework that integrates decentralized path planning with a centralized conflict resolution mechanism. The approach effectively reduces deadlocks and path replans, increasing success rates in multi-robot scenarios. Future enhancements may focus on improving conflict resolution strategies by enabling proactive re-planning requests and expanding the framework’s application scope to more complex 3D environments. The implications of this research extend to various real-world applications, including autonomous vehicle navigation and industrial automation. The team plans to further enhance the system’s scalability and assess its potential for integration with existing traffic and robotic systems.

