Decentralized Multi-Robot Relative Navigation in Unknown, Structurally Constrained Environments under Limited Communication (2510.09188v1)
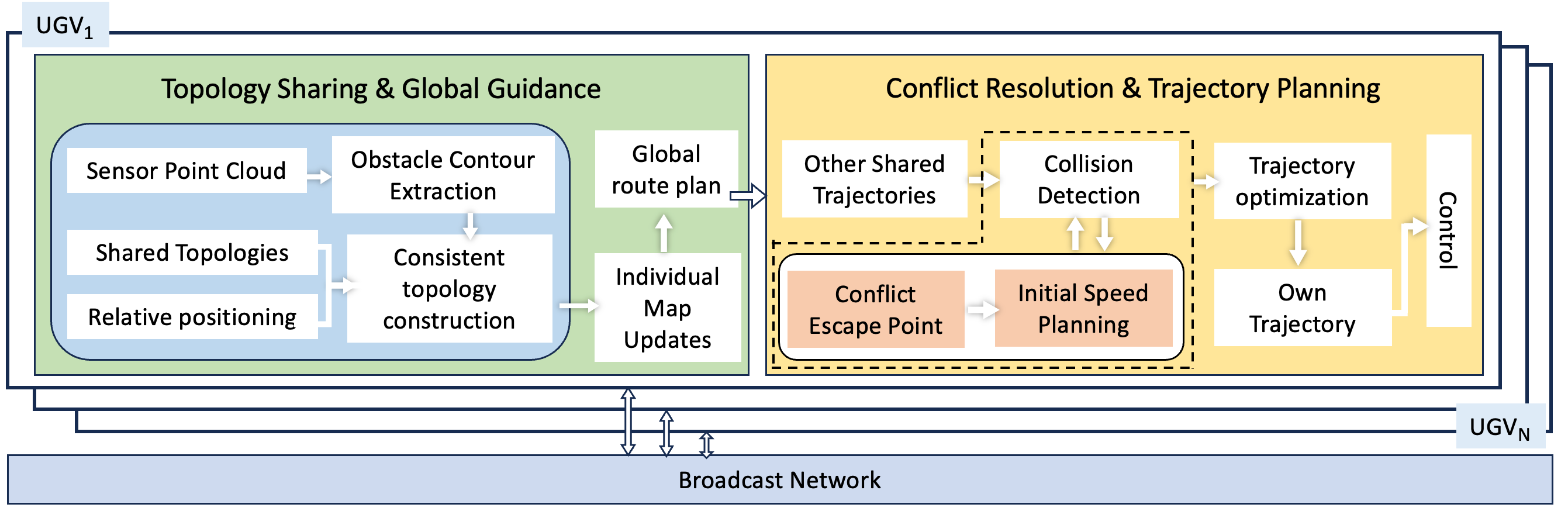
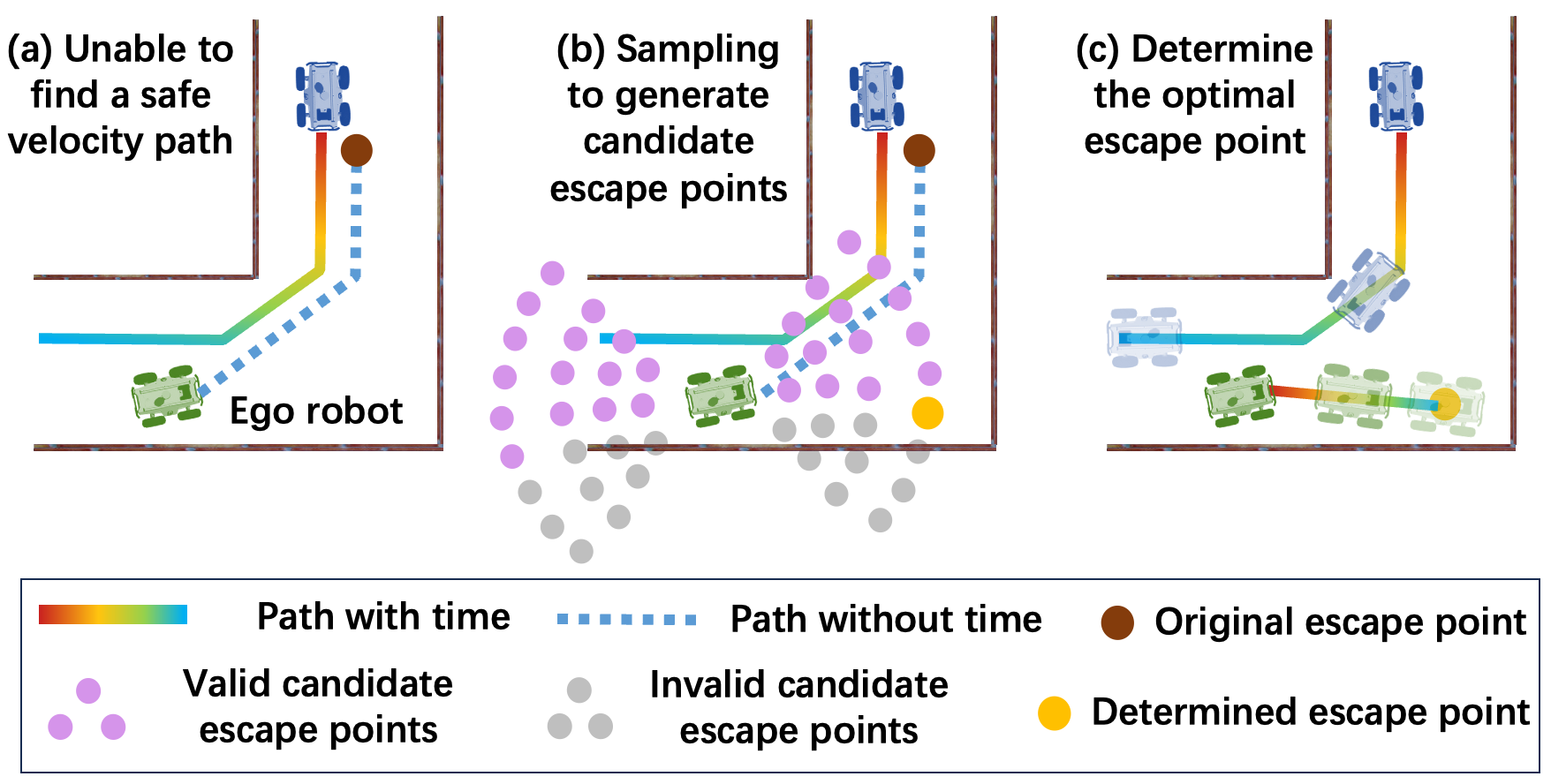
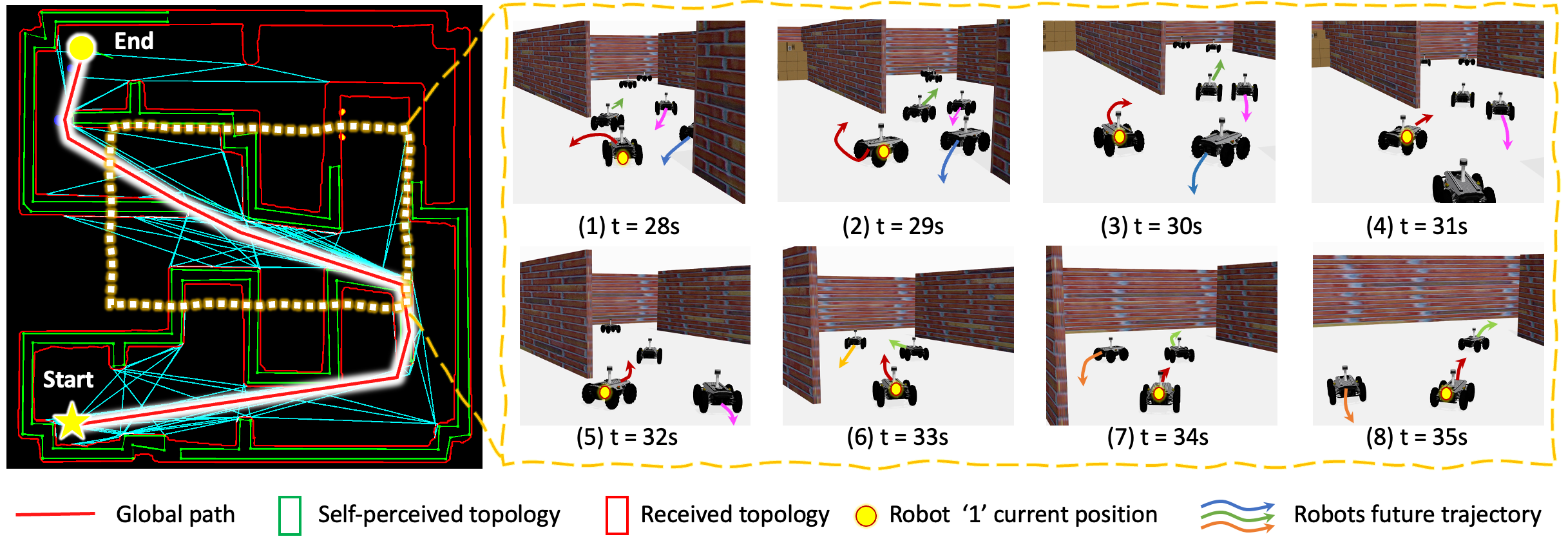
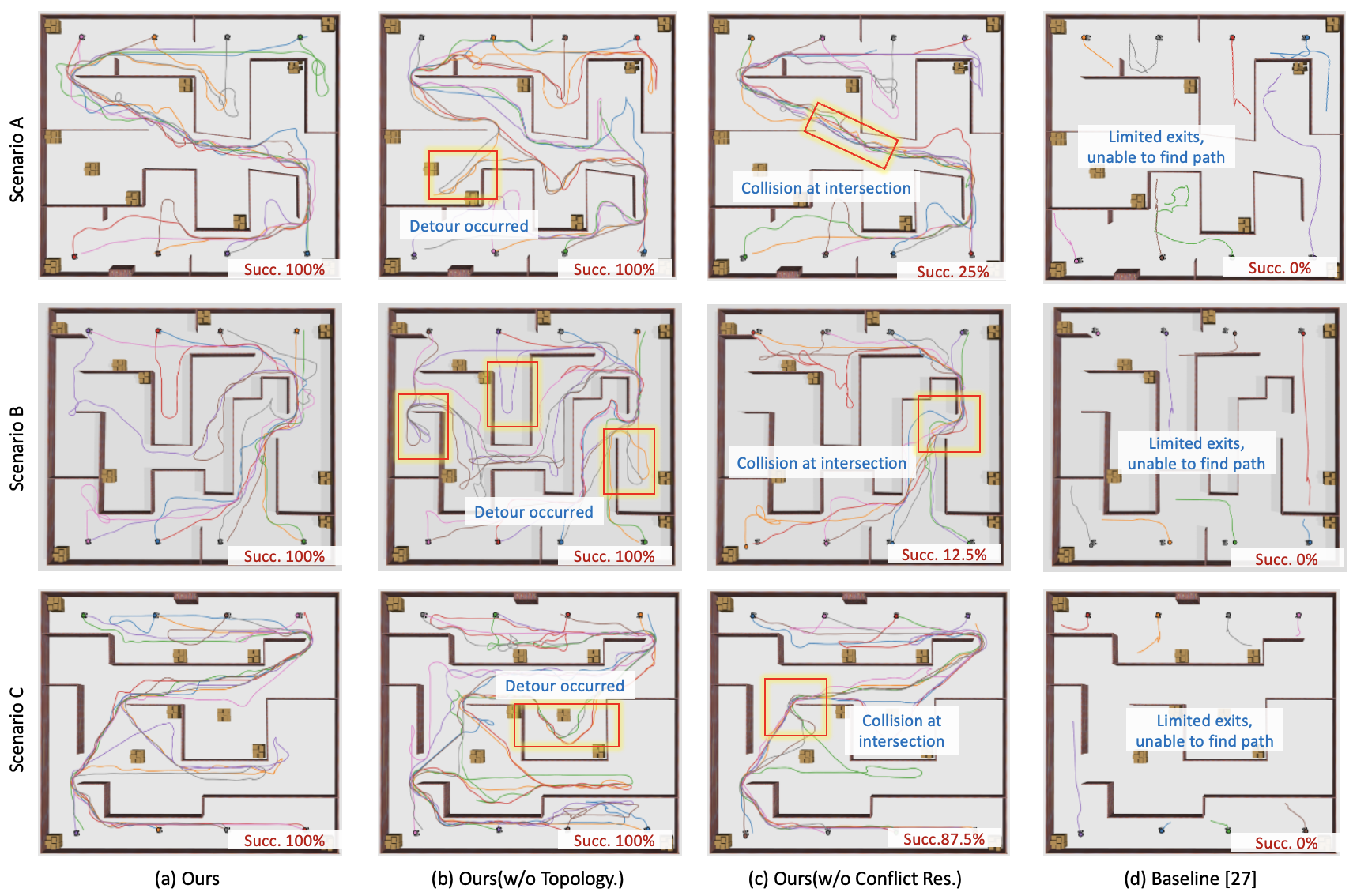
Abstract: Multi-robot navigation in unknown, structurally constrained, and GPS-denied environments presents a fundamental trade-off between global strategic foresight and local tactical agility, particularly under limited communication. Centralized methods achieve global optimality but suffer from high communication overhead, while distributed methods are efficient but lack the broader awareness to avoid deadlocks and topological traps. To address this, we propose a fully decentralized, hierarchical relative navigation framework that achieves both strategic foresight and tactical agility without a unified coordinate system. At the strategic layer, robots build and exchange lightweight topological maps upon opportunistic encounters. This process fosters an emergent global awareness, enabling the planning of efficient, trap-avoiding routes at an abstract level. This high-level plan then inspires the tactical layer, which operates on local metric information. Here, a sampling-based escape point strategy resolves dense spatio-temporal conflicts by generating dynamically feasible trajectories in real time, concurrently satisfying tight environmental and kinodynamic constraints. Extensive simulations and real-world experiments demonstrate that our system significantly outperforms in success rate and efficiency, especially in communication-limited environments with complex topological structures.
Sponsored by Paperpile, the PDF & BibTeX manager trusted by top AI labs.
Get 30 days free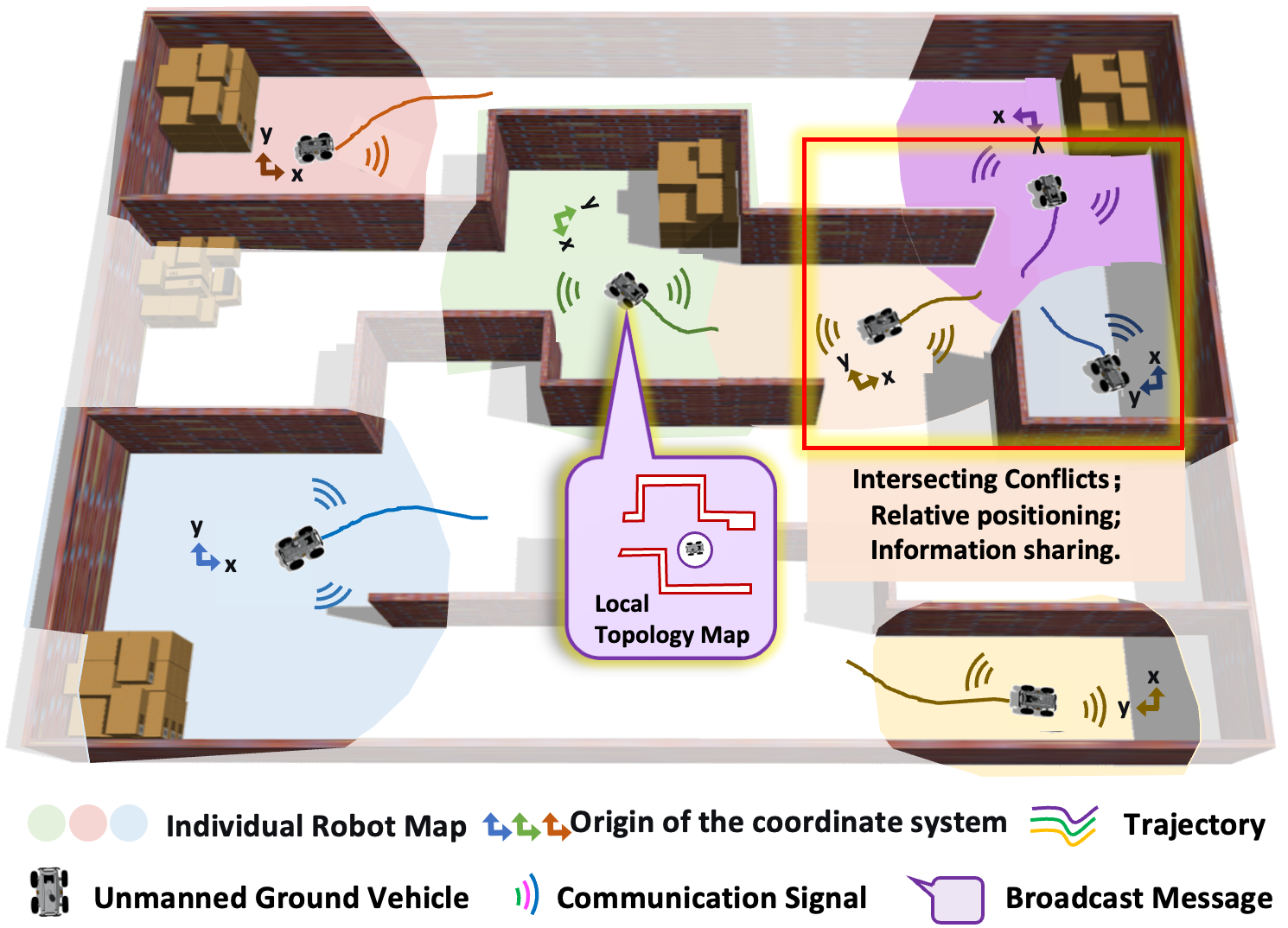
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Knowledge Gaps
Knowledge gaps, limitations, and open questions
- Formal guarantees: No proof of safety, completeness, deadlock/livelock freedom, or convergence under limited, asynchronous communication and evolving maps; provide formal analyses or certificates (e.g., barrier functions, completeness conditions) for both TSGG and CRTP.
- Map fusion without a unified frame: The paper does not specify how received contours are transformed into a local frame (beyond “relative localization at encounter”), nor how pose uncertainty and drift are modeled when fusing maps; define the estimation process, uncertainty handling, and error bounds for contour alignment and fusion.
- Overlap detection and conflict resolution in MergeTopologies: Criteria for matching “overlapping nodes and edges” and resolving ambiguous/inconsistent merges are unspecified; develop robust matching, hypothesis testing, and conflict-resolution strategies for topology fusion without a common coordinate system.
- Consistency over time: No mechanism is described to detect and correct topological inconsistencies introduced by noisy fusion or outdated data; design incremental consistency checks, map revision/pruning, and rollback strategies when new observations contradict past topology.
- Handling stale and time-stamped data: The framework lacks explicit temporal management (timestamps, recency weighting) of shared contours/topologies; evaluate how stale information affects planning and devise time-aware fusion/replanning.
- Choice of global planner: Global path planning uses depth-first search, which is generally suboptimal; investigate shortest-path or cost-aware planners (e.g., Dijkstra/A*) on visibility graphs and quantify gains vs DFS.
- Topological map completeness and edge validity: The method does not describe how partial visibility graphs handle occlusions, spurious edges, and later invalidations when obstacles are revealed; define policies for edge creation/removal and quantify errors from partial observations.
- Emergent global awareness metrics: The paper claims “emergent global awareness” but provides no metrics for map coverage/completeness, trap detection/avoidance rates, or time-to-awareness; define measurement protocols and benchmarks for these properties.
- Zero/rare encounters: Behavior in teams that rarely meet (or are partitioned) is underexplored; analyze worst-case performance and design measures (e.g., multi-hop gossip, memory of rendezvous points) to propagate topology without direct encounters.
- Communication model realism: Only packet success rate is varied; latency, jitter, range, multi-hop routing, partitions, and out-of-order delivery are not modeled; evaluate performance under realistic networking conditions and define protocols robust to them.
- CRTP conflict prediction under limited communication: ST-graph analysis presumes access to other robots’ predicted trajectories; assess how prediction quality degrades with lossy/asynchronous comms and propose fallback sensing-only strategies with guarantees.
- Escape-point strategy details and guarantees: Sampling sectors, sample counts, and cost weights are not specified; provide sensitivity analysis, failure-mode characterization (oscillation, livelock), and conditions under which escape points guarantee progress.
- Soft-constraint safety: Trajectory optimization uses soft penalties for obstacle and inter-robot avoidance; quantify constraint violations and incorporate hard constraints or certified safety (e.g., control barrier functions) to guarantee collision-free operation.
- Multi-robot fairness and priority: No mechanisms address which robot yields in narrow passages; paper fairness, starvation, and priority schemes to prevent dominance or recurring delays.
- Scalability: Experiments with N=8 do not show how computation, communication, and collision resolution scale to larger teams and denser traffic; provide complexity analyses and stress tests (e.g., N≥50).
- Dynamic, non-cooperative agents: Only team robots are modeled as dynamic obstacles; extend and evaluate against non-cooperative moving entities (humans/vehicles) with limited/no communication.
- Heterogeneous platforms and kinematics: The approach is demonstrated on differential-drive UGVs; assess applicability to car-like robots, omnidirectional bases, aerial robots, and mixed teams with different kinodynamic limits.
- 3D and multi-floor environments: The visibility-graph/topology approach and CRTP are limited to 2D; generalize to 3D environments (e.g., stairs, multi-level structures) and analyze the added complexity.
- Sensor dependence and range: Simulations assume 4 m LiDAR range; evaluate sensitivity to sensor range, FOV, occlusions, and noise, and quantify the minimum sensing requirements for reliable topology extraction.
- Relative localization robustness: Real-world fusion used sparse LiDAR feature matching and noted insufficiency to capture contours; rigorously quantify localization accuracy, failure modes, and propose robust alternatives (e.g., fiducials, UWB, scan-matching with uncertainty).
- Topology growth and memory management: No strategy is described for bounding map size or pruning obsolete/irrelevant regions; investigate compact topological summarization, aging, and memory constraints on embedded platforms.
- Replanning triggers and rates: The framework states low-frequency TSGG and high-frequency CRTP but omits actual rates and trigger policies; characterize the impact of these frequencies on performance and stability and derive tuning guidelines.
- Interplay between strategic and tactical layers: The closed-loop dynamics of switching local goals (escape points) while following high-level guidance are not analyzed; paper stability and convergence properties of the hierarchical controller.
- Wrong global guidance recovery: If TSGG yields suboptimal or incorrect guidance (due to incomplete/inconsistent maps), how does CRTP detect and deviate safely? Define detection criteria and recovery behaviors.
- Evaluation breadth and baselines: Comparisons exclude widely used methods (e.g., ORCA, DMPC, decentralized MPC variants, CBS-hybrids); include broader baselines and standardized benchmarks for stronger external validity.
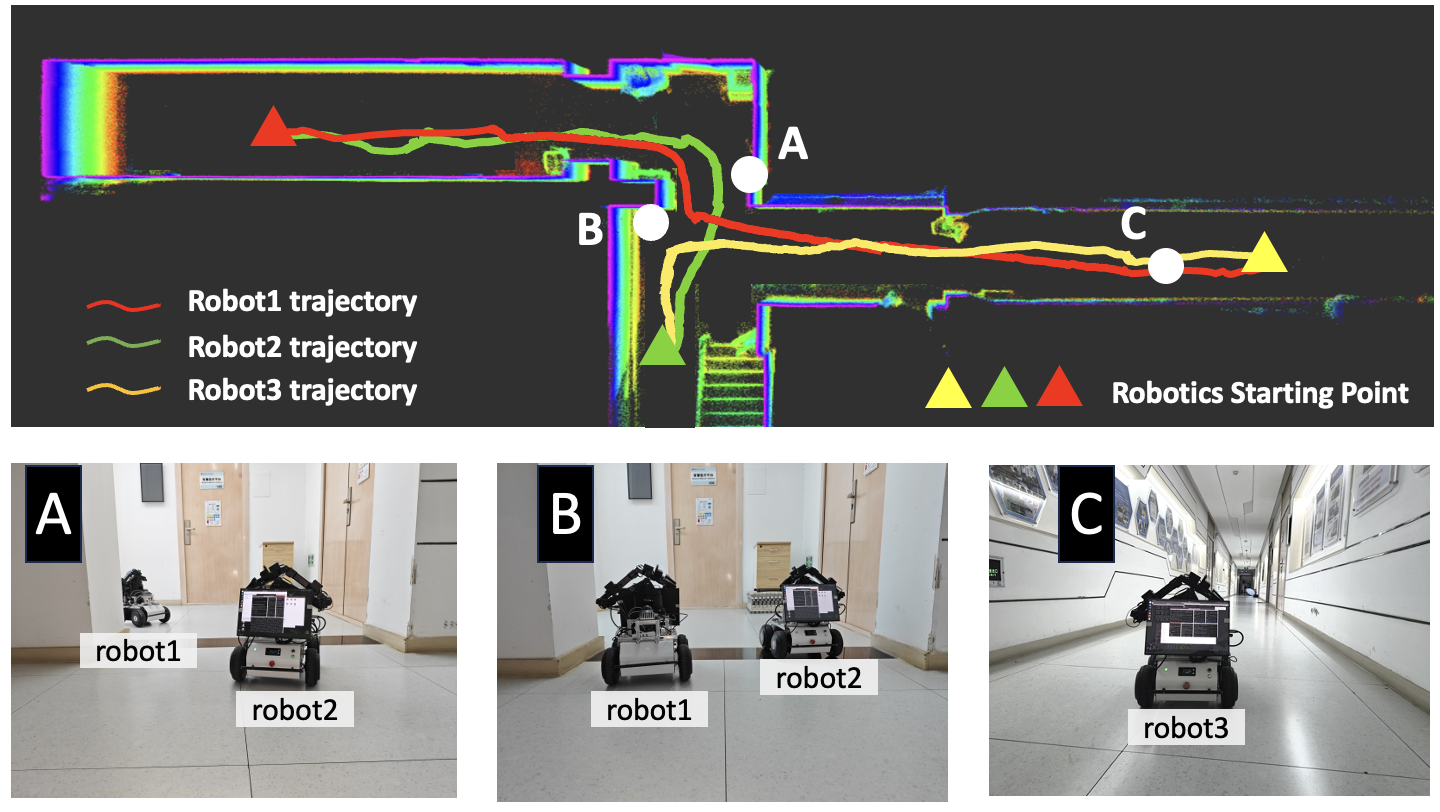
- Real-world quantitative results: The real-world demo is qualitative; report success rates, collision counts, path efficiency, optimization times, and communication statistics to substantiate transferability.
- Parameter transparency and reproducibility: Cost weights, sampling densities, optimization settings, and map fusion thresholds are not disclosed; provide full parameter sets, ablation of hyperparameters, and open-source code for reproducibility.
- Security/adversarial robustness: Map sharing assumes trusted peers; paper resilience to corrupted or malicious topology data and design validation/consensus mechanisms.
- Formal definition and detection of “topological traps”: The paper references large U-shaped traps but lacks a formal definition or detection algorithm; propose topological criteria and detection methods usable online.
Collections
Sign up for free to add this paper to one or more collections.