Nowcast3D: Reliable precipitation nowcasting via gray-box learning
Abstract: Extreme precipitation nowcasting demands high spatiotemporal fidelity and extended lead times, yet existing approaches remain limited. Numerical Weather Prediction (NWP) and its deep-learning emulations are too slow and coarse for rapidly evolving convection, while extrapolation and purely data-driven models suffer from error accumulation and excessive smoothing. Hybrid 2D radar-based methods discard crucial vertical information, preventing accurate reconstruction of height-dependent dynamics. We introduce a gray-box, fully three-dimensional nowcasting framework that directly processes volumetric radar reflectivity and couples physically constrained neural operators with datadriven learning. The model learns vertically varying 3D advection fields under a conservative advection operator, parameterizes spatially varying diffusion, and introduces a Brownian-motion--inspired stochastic term to represent unresolved motions. A residual branch captures small-scale convective initiation and microphysical variability, while a diffusion-based stochastic module estimates uncertainty. The framework achieves more accurate forecasts up to three-hour lead time across precipitation regimes and ranked first in 57\% of cases in a blind evaluation by 160 meteorologists. By restoring full 3D dynamics with physical consistency, it offers a scalable and robust pathway for skillful and reliable nowcasting of extreme precipitation.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What this paper is about
This paper introduces Nowcast3D, a new way to predict very short‑term rainfall (the next few minutes to hours), especially during extreme storms. Instead of looking at flat, 2D radar images, it uses full 3D radar “volumes” (like a weather CT scan) and blends real physics with machine learning. The goal is to make fast, detailed, and reliable forecasts that help warn people before dangerous rain arrives.
The main questions the researchers asked
- Can we make more accurate rain forecasts for the next 1–3 hours by using the full 3D radar data, not just 2D slices?
- Can we design a model that follows basic physical rules of how rain and clouds move and grow, so predictions look realistic and don’t get blurry over time?
- Can we also tell people how uncertain the forecast is by creating an “ensemble” (many likely futures), not just one answer?
How the method works (in everyday language)
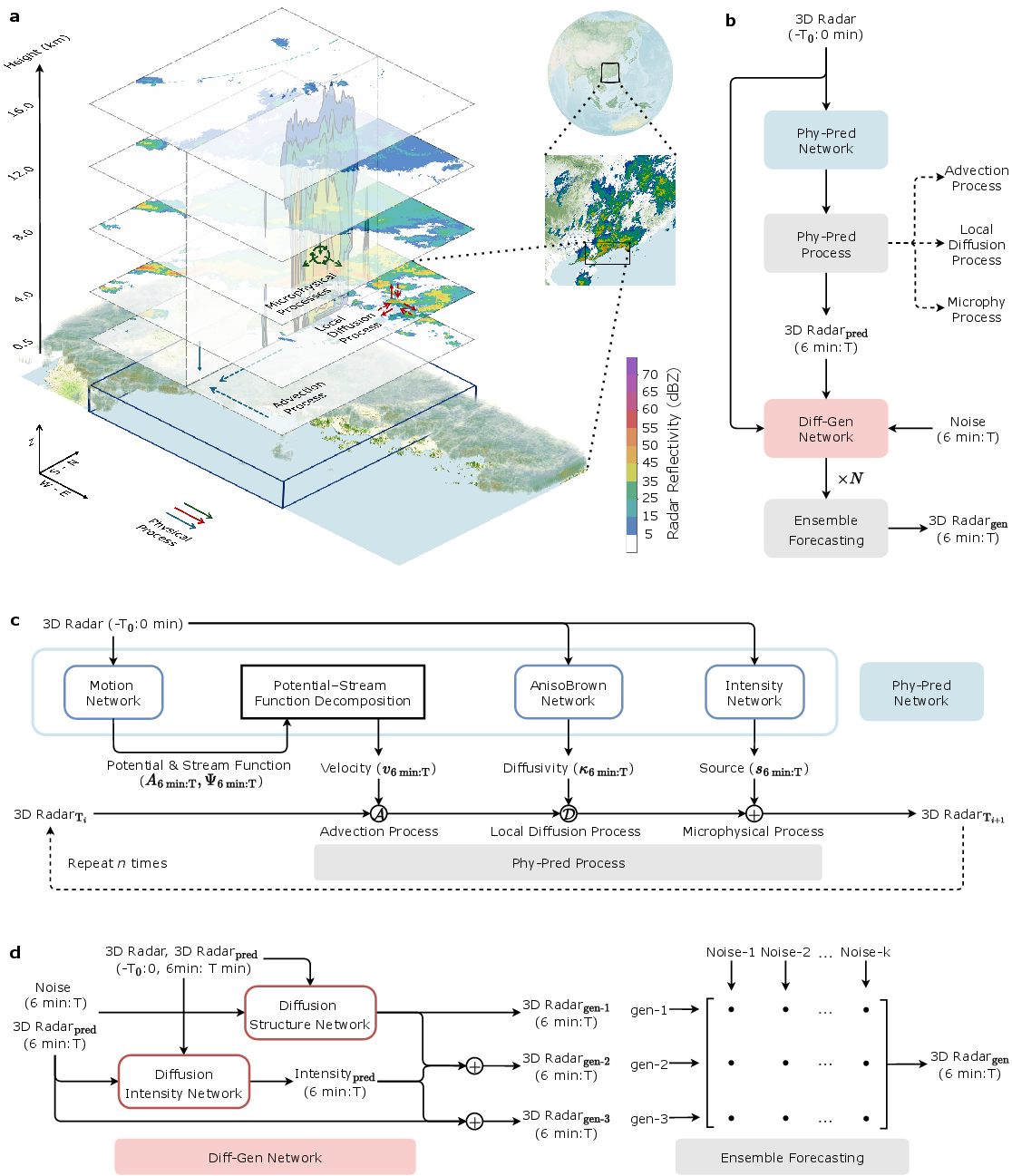
Think of the atmosphere like a 3D aquarium full of tiny “rain particles” that move, spread, and change. Nowcast3D teaches a computer to predict what happens next using three simple, physics‑based ideas:
- Advection: This means “carried by the wind.” If the wind blows north, the rain echoes move north.
- Diffusion: This is “spreading out,” like dye slowly mixing in water. It represents small, turbulent motions that smear and stretch rain areas.
- Source (microphysics): This captures rain forming, strengthening, or weakening in place (e.g., droplets growing or evaporating).
Instead of guessing wind directly from the radar (which is hard), the model uses a safe trick from physics called a “potential-stream decomposition.” Think of it like splitting motion into two easy‑to‑combine parts: one that pushes straight (potential) and one that swirls (stream). Together, they form a physically sensible 3D wind field.
The model has two stages:
- Physics‑driven forecast
- The model reads a short history of 3D radar scans and infers the wind, the amount of spreading, and the local changes in rain intensity.
- It then “evolves” the radar forward in time, like stepping through a physics simulation, so the rain areas move, spread, and grow/shrink realistically.
- Probabilistic (ensemble) forecast
- Because weather is messy, the model creates multiple plausible futures using a generative technique called “conditional diffusion.”
- One branch focuses on the overall shape and placement of future rain; the other branch fine‑tunes local intensity details.
- By sampling different noise patterns (think rolling many dice), it builds an ensemble that shows both best guesses and the uncertainty around them.
Key terms you might see:
- Gray‑box learning: Mixing known physics (white‑box) with data‑driven learning (black‑box) to get the best of both worlds.
- 3D radar reflectivity: A stacked set of radar slices from ground up through the atmosphere, showing where and how strong the rain is at different heights.
- Semi‑Lagrangian advection: A sturdy way to “carry the signal with the flow,” so features move with the wind without falling apart.
- Ensemble: Many slightly different forecasts that tell you the range of likely outcomes (and how confident you should be).
What they found and why it matters
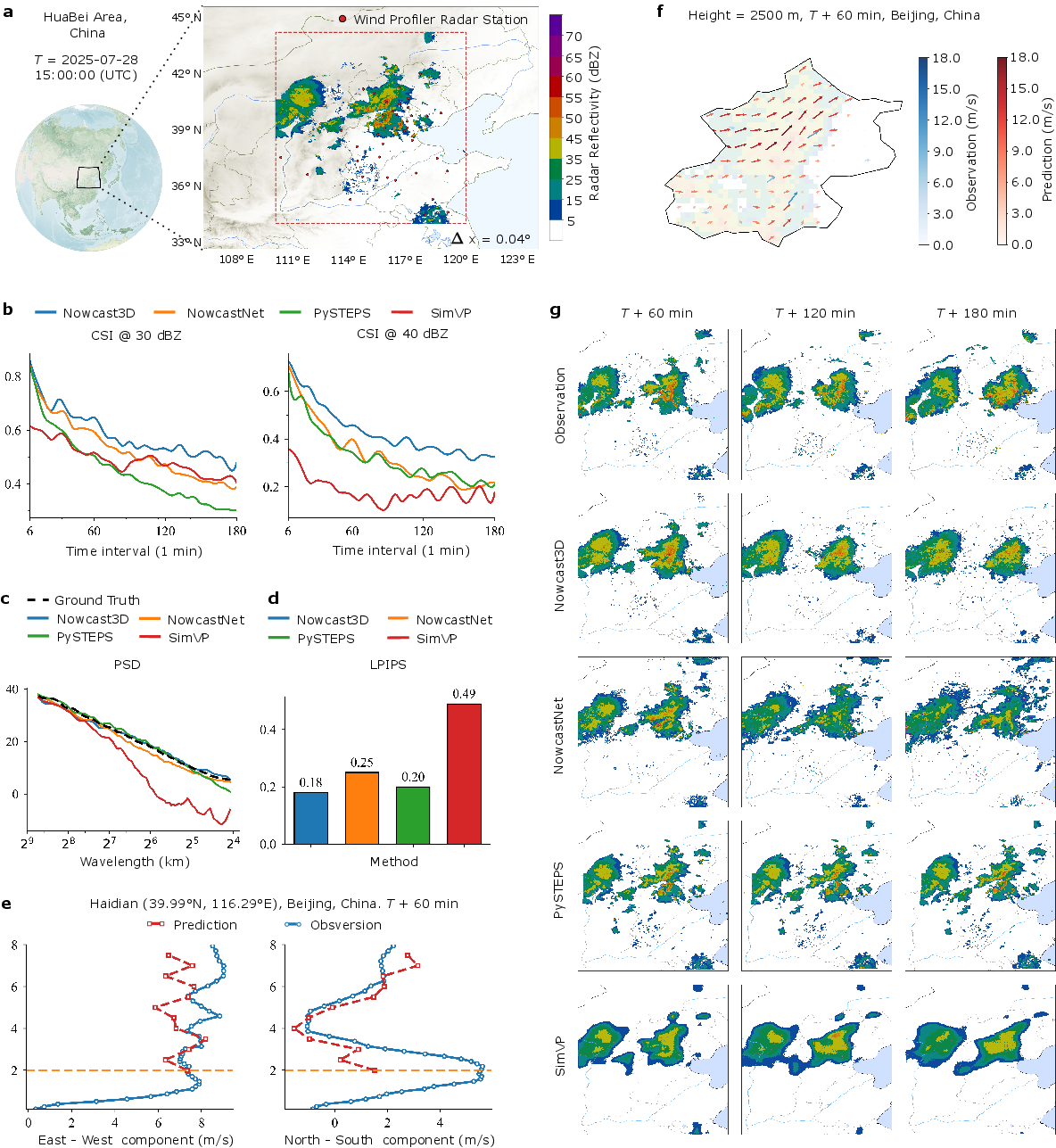
- More accurate up to 3 hours: Across many storms and regions, Nowcast3D beat strong existing methods (like pySTEPS, NowcastNet, SimVP) in tracking where heavy rain would be and how its shape changes.
- Realistic structure at different scales: It kept sharp, storm‑like features and matched the overall “texture” of rain systems better than the others.
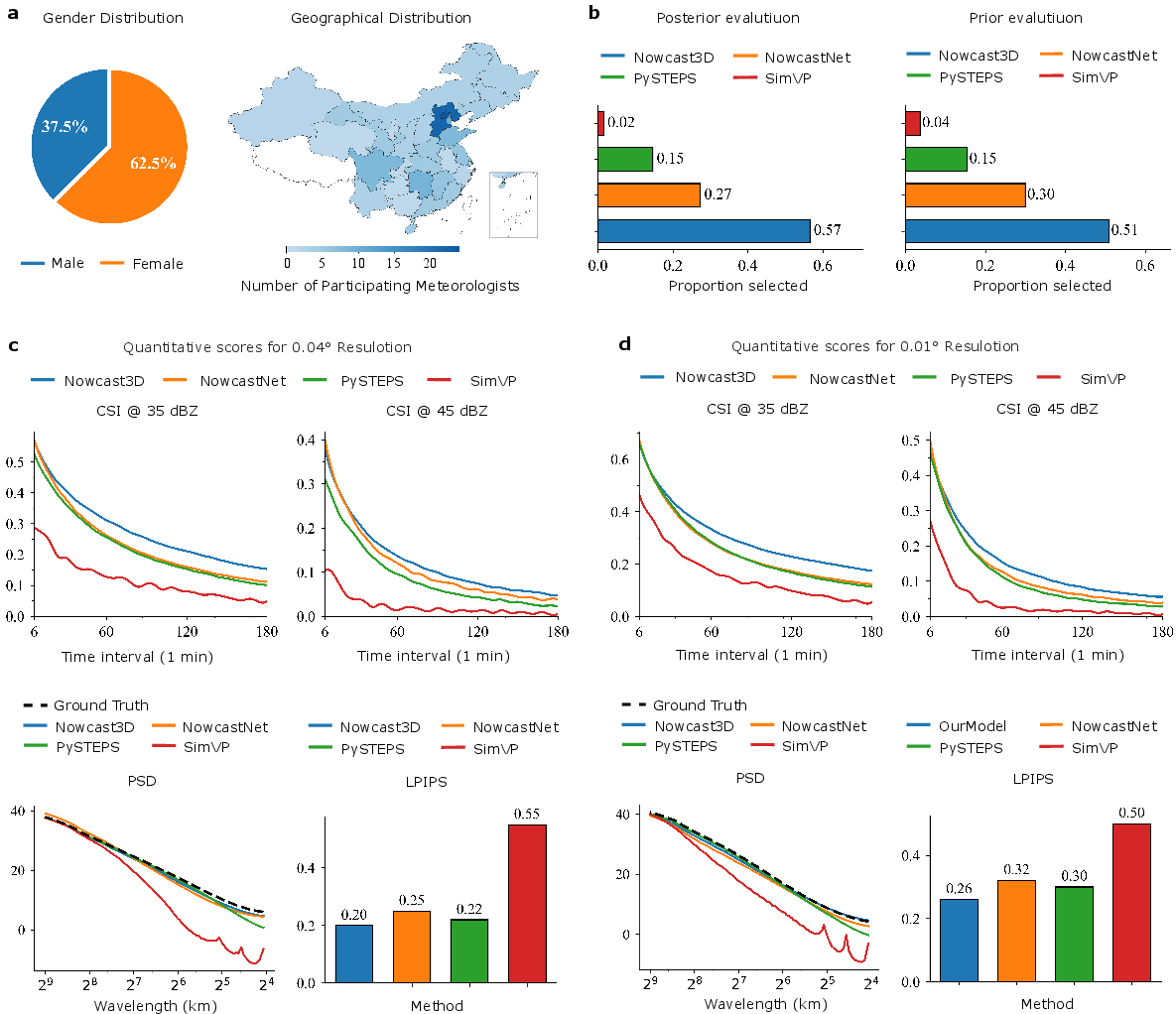
- Preferred by experts: In a blind test with 160 meteorologists across China, Nowcast3D was ranked best in 57% of cases when the future outcome was shown (post‑hoc), and in 51% when judging without seeing the future (prior).
- Useful uncertainty: Its ensembles were better calibrated, meaning they gave a trustworthy range of outcomes instead of a single, possibly misleading prediction.
- 3D winds that make sense: The model’s inferred 3D wind fields aligned well with independent wind profiler measurements, especially where rain was present (where radar gives the strongest signal).
These results matter because emergency managers and forecasters need reliable, minute‑by‑minute guidance with enough lead time to warn people, close roads, and prepare hospitals—especially in fast‑moving, high‑impact storms.
What this could mean going forward
- Better local warnings: City‑scale forecasts at street‑level resolution can help avoid flood damage and save lives.
- More trust in AI weather tools: By baking in physics and sharing uncertainty clearly, forecasts look and behave more like real storms.
- A foundation to build on: If you add more data (like Doppler radar winds, satellite images, lightning), or couple the system with regular weather models, nowcasts could get even better and extend further into the future.
In short, Nowcast3D shows that combining 3D radar with physics‑guided AI can deliver faster, sharper, and more trustworthy short‑term rain forecasts—exactly what communities need when extreme weather strikes.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
- Quantify operational performance: no measurements of end-to-end latency, GPU/CPU memory use, and throughput for 3D inference and K-member ensembles at 0.01° and 0.04°; unclear if the system meets real-time constraints in national deployments.
- Boundary conditions and domain inflow/outflow are unspecified for the PDE solver; the impact of boundary treatment on long-lead advection and event ingress/egress remains untested.
- Semi-Lagrangian advection is typically non-conservative; the paper claims “conservative advection” without demonstrating flux conservation, monotonicity, or non-negativity enforcement for reflectivity.
- Identifiability of decomposed processes (advection v, diffusivity κ, source s) is not established; the source term may absorb transport errors, confounding physical interpretation.
- Physical validity of evolving reflectivity R with an advection–diffusion–source PDE is unquantified; reflectivity’s nonlinear relation to hydrometeor mass implies the PDE may be mis-specified—error bounds versus evolving mixing ratios or Z–R transformations are missing.
- Helmholtz (potential–stream) velocity reconstruction lacks description of boundary constraints and uniqueness; sensitivity to domain truncation and noisy/sparse reflectivity is unassessed.
- Vertical velocity and divergence constraints are not enforced or validated; the realism of reconstructed w and divergence fields is unknown.
- Wind validation is limited (few profiler sites/times); performance across many events, altitudes, and precipitation regimes, and in non-precipitating regions (where inference is underconstrained), remains open.
- Diffusivity tensor κ learning lacks physical constraints (e.g., positive-definite, bounded anisotropy, scale dependence); risk of over/under-diffusion and double-counting with the stochastic/generative branches is not analyzed.
- The stochastic diffusion step uses Monte Carlo sampling (M not specified); accuracy–cost trade-offs and sensitivity to M, Δt, and grid spacing are not characterized.
- The probabilistic diffusion model is trained on 2D slices for cost; how this affects 3D vertical coherence, cross-level correlations, and temporal consistency is untested.
- Ensemble construction heuristics (S_struct, S_res, hybrid with α) lack probabilistic justification and calibration; the choice of α, member dependence, spread–skill balance, and potential overdispersion are not evaluated.
- Uncertainty verification is limited (CRPS only for one case); broader reliability diagnostics (rank histograms, reliability diagrams, sharpness, Brier score, PIT, coverage of prediction intervals) are absent.
- Failure modes are not characterized: which event types (e.g., stratiform with bright band, orographic rain, tropical cyclones, sea-breeze storms) degrade performance and why?
- No evaluation against hydrologically relevant targets (rain rates/accumulations); conversion from reflectivity to rainfall and validation against rain gauges are missing.
- Radar data quality control is underdescribed; sensitivity to beam blockage, attenuation, anomalous propagation, bright-band contamination, and scan-strategy heterogeneity is unknown.
- Multi-radar volumetric compositing procedures (e.g., CAPPI strategy, vertical interpolation, inter-radar calibration) are not detailed; their errors and model sensitivity remain unexplored.
- Exclusively reflectivity-based input; benefits of assimilating Doppler radial velocity, polarimetric moments (ZDR, Kdp), geostationary satellite, and lightning for constraining v, κ, and s are untested.
- Geographic and temporal generalization are only partially probed: training is 2024 South China; robustness across seasons, climatologies, different radar networks/countries, and longer time horizons is unverified.
- Lead-time ceiling is 3 hours; strategies for seamless blending to NWP beyond nowcasting horizons and handover performance are not investigated.
- No coupling with NWP or data assimilation is attempted; whether NWP flow and thermodynamic priors improve v, κ, s inference and extend skill is an open question.
- Limited ablations: the paper lacks systematic tests isolating contributions of (i) Helmholtz decomposition vs directly learned velocities, (ii) diffusion and source branches, (iii) stochastic diffusion vs deterministic, and (iv) the dual-branch generative design.
- Metric scope is narrow for 3D claims: most verification uses 2D column-maximum; dedicated 3D metrics (echo-top distributions, vertical reflectivity gradients, bright-band representation, vertical shear consistency) are not reported.
- Robustness to sparse low-altitude coverage and cone-of-silence artifacts is not quantified; vertical-performance variation is observed but not causally analyzed or mitigated.
- Non-negativity and physical plausibility constraints on predicted reflectivity (e.g., no spurious negative/physically implausible values) are not discussed.
- Handling of extreme intensities (radar saturation/attenuation in very heavy rain and hail) and associated biases in both training and inference is not addressed.
- Data and code availability are unspecified; reproducibility of training, preprocessing, PDE solver configuration, and evaluation pipelines is unclear.
- Scalability to continental domains and 24/7 operations (model updates, continual learning, drift handling) is not demonstrated.
- Ethical/operational aspects—warning issuance thresholds, false alarm versus miss trade-offs for high-impact events, and user-centered evaluation beyond preference rankings—are not covered.
Practical Applications
Immediate Applications
The following applications can be deployed now, leveraging the paper’s gray-box, fully 3D, probabilistic nowcasting with 0–3 hour skill, ensemble uncertainty, and 3D wind inference validated against profiler data.
- Severe weather warning and operational nowcasting
- Sectors: public safety, meteorological services, emergency management
- What: Replace or augment current 2D radar extrapolation in control rooms with 3D, ensemble nowcasts to issue targeted warnings (e.g., red/yellow alerts), siren activations, and geofenced public notifications.
- Tools/workflows: Web dashboard with exceedance probability maps (e.g., P[Z≥40 dBZ], P[>25 mm/hr]); OGC WMS/WMTS layers into AWIPS/SMART Met; API for national alerting platforms (CAP).
- Assumptions/dependencies: Real-time access to volumetric radar volumes; <1–2 minute end-to-end latency; regional calibration; operator training in probabilistic products.
- Flash flood guidance and urban drainage real-time control
- Sectors: water utilities, hydrology, smart cities, civil infrastructure
- What: Drive storm sewer/detention control and flash-flood guidance by coupling ensemble rainfall fields to hydraulic models (e.g., SWMM, InfoWorks ICM, MIKE URBAN).
- Tools/workflows: Nowcast API → hydrologic/hydraulic model ingest → pump/sluice setpoint optimization; CSO mitigation workflows with probabilistic thresholds.
- Assumptions/dependencies: Local intensity–reflectivity (Z–R) calibration; accurate land-surface/pipe network models; SCADA integration; radar QC (beam blockage, attenuation).
- Airport and terminal-area convective impact prediction
- Sectors: aviation, air traffic management, ground ops
- What: Use 3D storm structure and inferred winds to forecast convective cells affecting arrival/departure corridors and ramp operations; probabilistic “stop-go” windows.
- Tools/workflows: Integration with decision support (e.g., TFMS, ATFM); ramp lightning/precip hazard tiles; 15–180 min tactical reroute suggestions.
- Assumptions/dependencies: Terminal radar coverage; latency <2 min; conservative communication of wind fields (hydrometeor-tracked flow, not full dynamical wind).
- Short-horizon flood and landslide triggers
- Sectors: emergency management, geohazards, insurance
- What: Trigger landslide patrols and flood barriers using 30–180 min probability of local extreme precipitation and accumulation surrogates.
- Tools/workflows: Geofenced alert thresholds; integration with crowdsource/reporting apps; triage and surge staffing plans.
- Assumptions/dependencies: Terrain-aware thresholds; coupling to antecedent soil moisture when available; communication protocols to reduce false alarm fatigue.
- Field operations and logistics re-planning
- Sectors: logistics, ports/rail, outdoor construction, events
- What: Dynamic dispatch/routing and schedule shifts to avoid cells; pause/resume rules for cranes, paving, concrete pours, and events.
- Tools/workflows: Route APIs for fleet TMS; site-level hazard tiles in GIS (ArcGIS/QGIS); ensemble-derived “safe window” suggestions.
- Assumptions/dependencies: Organizational SOPs; mobile integration; acceptance of probabilistic recommendations.
- Precision agriculture task scheduling
- Sectors: agriculture
- What: Schedule irrigation, spraying, and harvest within short rain-free windows; protect assets (hail nets, covers) ahead of cells.
- Tools/workflows: Nowcast plug-in for farm management systems; geo-alerts for fields with probability of heavy rain/hail proxies (high dBZ tops).
- Assumptions/dependencies: Rural radar coverage; localized Z–R/hail relationships; device connectivity.
- Grid storm readiness and hydro operations
- Sectors: energy, utilities
- What: Pre-position outage crews and vegetation teams; short-term hydro reservoir gate management using predicted inflows from nowcast-driven rainfall-runoff.
- Tools/workflows: Probabilistic feeder outage risk maps; inflow surrogates to reservoir rules; work management system triggers.
- Assumptions/dependencies: Catchment models; crew logistics; radar coverage in service area.
- City mobility and road safety interventions
- Sectors: transportation, smart cities
- What: Activate variable speed limits, close flood-prone underpasses, reroute buses/trams where convective cores are predicted.
- Tools/workflows: ATMS integration; roadside VMS messages; Waze/Google Maps hazard feeds.
- Assumptions/dependencies: Road vulnerability maps; governance for dynamic closures; latency under 2–3 minutes.
- Consumer hyperlocal weather in apps
- Sectors: software, media
- What: Minute-by-minute precipitation notifications with uncertainty bands; “will it rain on my route” queries.
- Tools/workflows: SaaS nowcast API; SDKs for mobile/weather apps; tile services for map overlays.
- Assumptions/dependencies: Licensing of radar feeds; service-level objectives; clear uncertainty UX.
- Forecaster augmentation and training
- Sectors: meteorology (operations, education)
- What: Use 3D fields and ensemble members as decision aids; compare inferred winds with profiler data; training modules on 3D convective evolution.
- Tools/workflows: AWIPS/Metview plug-ins; side-by-side ensemble viewer; case library with PSD/CSI/LPIPS diagnostics.
- Assumptions/dependencies: Workstation integration; stable APIs; cultural adoption of ML-physics tools.
- 3D wind retrieval product within precipitation volumes
- Sectors: meteorology, research, aviation
- What: Provide hydrometeor-tracked 3D motion fields for situational awareness and as inputs to downstream analyses.
- Tools/workflows: NetCDF/GRIB wind cubes; vector slice visualizations; cross-validation with profiler radars.
- Assumptions/dependencies: Reliable reflectivity in precipitating regions; clear caveats outside echoes and near ground clutter.
- Rapid risk pricing and claims triage
- Sectors: insurance/finance
- What: Use predicted storm footprints to adjust parametric triggers and pre-position claims teams for urban flash floods and hail-prone cells.
- Tools/workflows: Event footprint service; exceedance probability feeds; integration with FNOL and CAT response dashboards.
- Assumptions/dependencies: Regulatory acceptance of AI guidance; calibration to peril-specific loss models; data-sharing agreements.
Long-Term Applications
These depend on further research, scaling, or integration (e.g., multi-modal data fusion, robust domain adaptation, tighter NWP coupling, and edge/HPC deployment).
- National integrated nowcasting with multi-sensor fusion
- Sectors: meteorological services, public safety
- What: Fuse volumetric radar with Doppler velocities, satellite, lightning, gauges for tighter wind/precip constraints and gap-filling.
- Tools/workflows: Learned data assimilation layer; cross-sensor QC; national probabilistic hazard service.
- Dependencies: Access to multi-sensor streams; consistent calibration; standards (OGC EDR).
- ML–NWP hybrid for 3–12 h convective-scale forecasting
- Sectors: meteorology, energy, aviation
- What: Blend Nowcast3D ensembles with convection-permitting NWP via time-lag blending or ML-guided DA to extend skillful guidance beyond 3 hours.
- Tools/workflows: Seamless forecast pipeline; bias-aware blending; flow-dependent localization.
- Dependencies: Coupling interfaces to NWP cores; compute budget; verification at scale.
- Autonomous drainage “digital twins” with predictive control
- Sectors: water utilities, smart cities
- What: Closed-loop MPC that consumes ensemble nowcasts to optimize pumps, valves, green infrastructure, and detention networks in real time.
- Tools/workflows: Twin of sewer network; ensemble-aware MPC; SLA-based CSO compliance.
- Dependencies: High-fidelity network models; telemetry density; robust cyber-physical security.
- UTM and autonomous mobility weather geofencing
- Sectors: drones (UTM), autonomous vehicles, logistics
- What: Dynamic geofences and route replanning around convective cells and gust fronts inferred from 3D nowcasts.
- Tools/workflows: UTM weather corridors; vehicle API hooks; risk-tier policies tied to ensemble probabilities.
- Dependencies: Policy/regulatory frameworks; reliable low-altitude radar coverage; standardized hazard interfaces.
- Probabilistic convective hazard indices for aviation
- Sectors: aviation
- What: Derive turbulence/microburst proxies and convective impact probabilities from 3D structure and inferred flows.
- Tools/workflows: Hazard tiles; time-to-impact metrics; EFB integrations for pilots.
- Dependencies: Further validation; coupling with in situ and radar radial velocity.
- Real-time catastrophe modeling and parametric products
- Sectors: insurance/finance
- What: Drive high-frequency risk curves for flash floods and hail; power parametric microinsurance payouts using exceedance probabilities.
- Tools/workflows: Live hazard curves; event sets from ensembles; smart contracts/oracles.
- Dependencies: Regulatory approval; robust calibration to loss; auditable model governance.
- City-scale flood digital twins at street level
- Sectors: urban planning, resilience
- What: Blend street-scale nowcasts (0.01°) with high-res DEMs and porous media models to simulate evolving inundation for evacuation and traffic control.
- Tools/workflows: Real-time 3D visualization; agent-based evacuation simulators; what-if drill modules.
- Dependencies: Detailed elevation/drainage datasets; compute at the edge/HPC; public communications playbooks.
- Grid-aware energy trading and demand response
- Sectors: energy/markets
- What: Use short-term precipitation proxies for storm-induced outage risk and hydropower inflow uncertainty to optimize bids and reserves.
- Tools/workflows: Ensemble-to-market signals; probabilistic reserve sizing; risk-adjusted dispatch.
- Dependencies: Market rules accepting probabilistic inputs; historical calibration.
- Precision agriculture robotics and irrigation autonomy
- Sectors: agtech/robotics
- What: Farm robots and smart irrigation that autonomously adjust plans based on probabilistic rain windows and cell motion.
- Tools/workflows: On-farm edge inference; VRT controllers; cooperative fleet scheduling.
- Dependencies: Rural radar coverage; robust connectivity; domain adaptation across microclimates.
- 3D wind field assimilation into mesoscale models
- Sectors: meteorology/academia
- What: Assimilate hydrometeor-tracked 3D motion into convection-permitting DA (EnVar/4D-Var) to constrain storm-scale dynamics.
- Tools/workflows: Observation operators for reflectivity-consistent winds; ensemble DA experiments.
- Dependencies: Observation error modeling; joint use with Doppler radial velocity.
- Global transfer and fairness auditing
- Sectors: public sector, academia
- What: Domain adaptation across climates/scan strategies; equitable performance auditing for underserved regions with sparse networks.
- Tools/workflows: Continual learning; synthetic augmentation; performance dashboards by region/seasons.
- Dependencies: Open datasets; standardized benchmarks; governance frameworks.
- Synthetic radar ensemble generation for training and stress tests
- Sectors: academia, software
- What: Use the conditional diffusion component to generate physically plausible radar sequences for rare-event augmentation and robustness testing.
- Tools/workflows: Data generation pipelines; coverage of tail scenarios; curriculum training.
- Dependencies: Controls for physical consistency; validation vs. held-out extremes.
- Event-centric collaboration tools for forecasters
- Sectors: meteorology operations
- What: Shared ensemble narratives, likelihood timelines, and uncertainty explainers tailored for inter-agency briefings.
- Tools/workflows: Storyboard generation from ensembles; standardized probability language; integration with chat/collab platforms.
- Dependencies: HCI research; training; institutional adoption.
Cross-cutting assumptions and dependencies (for most applications)
- Data: Continuous access to calibrated volumetric radar reflectivity (and ideally Doppler velocities), robust QC for attenuation/beam blockage/AP, and accurate georegistration.
- Compute and latency: GPU inference capacity to maintain 1–3 minute latency; resilient pipelines; failover plans.
- Localization: Region-specific Z–R relationships, scan strategies, orography effects; retraining/finetuning for new radars/climates.
- Uncertainty communication: User training and SOPs for probabilistic thresholds to mitigate false alarms and overconfidence.
- Integration: APIs conforming to OGC/EDR standards; connectors to AWIPS, hydrologic/traffic/utility systems; security and auditing.
- Validation and governance: Continuous verification (CSI/PSD/LPIPS/CRPS), model drift monitoring, and documentation for regulatory or public-sector use.
Glossary
- Advection: Transport of a physical quantity by a flow field, here the movement of reflectivity by winds. "Reflectivity changes are partitioned into three contributions: advection by the 3D wind field, local diffusion representing small-scale spreading, and microphysical tendencies that alter reflectivity in situ."
- Anisotropic diffusivity tensor: A matrix-valued parameter that allows diffusion rates to vary by direction and location. "a spatially varying, anisotropic diffusivity tensor"
- Anomalous propagation: Radar artifact where atmospheric conditions cause non-standard beam paths and false echoes. "issues such as beam attenuation and anomalous propagation remain sources of error."
- Beam attenuation: Reduction in radar signal strength due to absorption or scattering along the path. "issues such as beam attenuation and anomalous propagation remain sources of error."
- Bright band: Enhanced radar reflectivity near the melting layer of precipitation due to partially melted hydrometeors. "echo-top variability, bright bands and layer-dependent reflectivity"
- Brownian motion: Random process underlying stochastic dispersion used to model unresolved small-scale motions. "introduces a Brownian-motionâinspired stochastic term to represent unresolved motions."
- Column-maximum reflectivity: A 2D projection taking the maximum reflectivity along each vertical column. "column-maximum reflectivity derived from the same volumes"
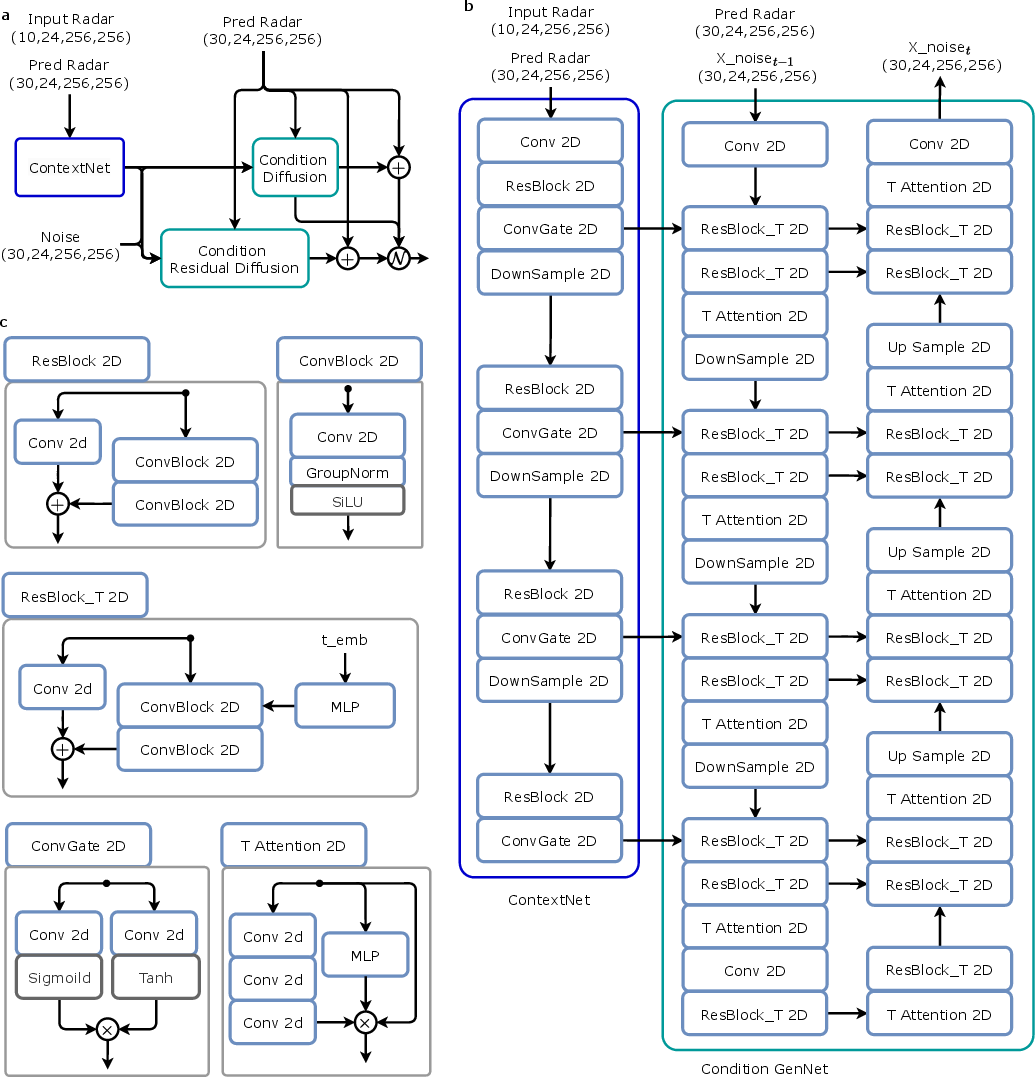
- Conditional diffusion model: A generative model that samples from a learned distribution conditioned on context via a diffusion/denoising process. "The probabilistic refinement stage is performed by a conditional diffusion model with a dual-branch architecture (Figure \ref{fig:model}d)."
- Conservative advection operator: A transport operator that preserves integral quantities (e.g., mass) during advection. "learns vertically varying 3D advection fields under a conservative advection operator"
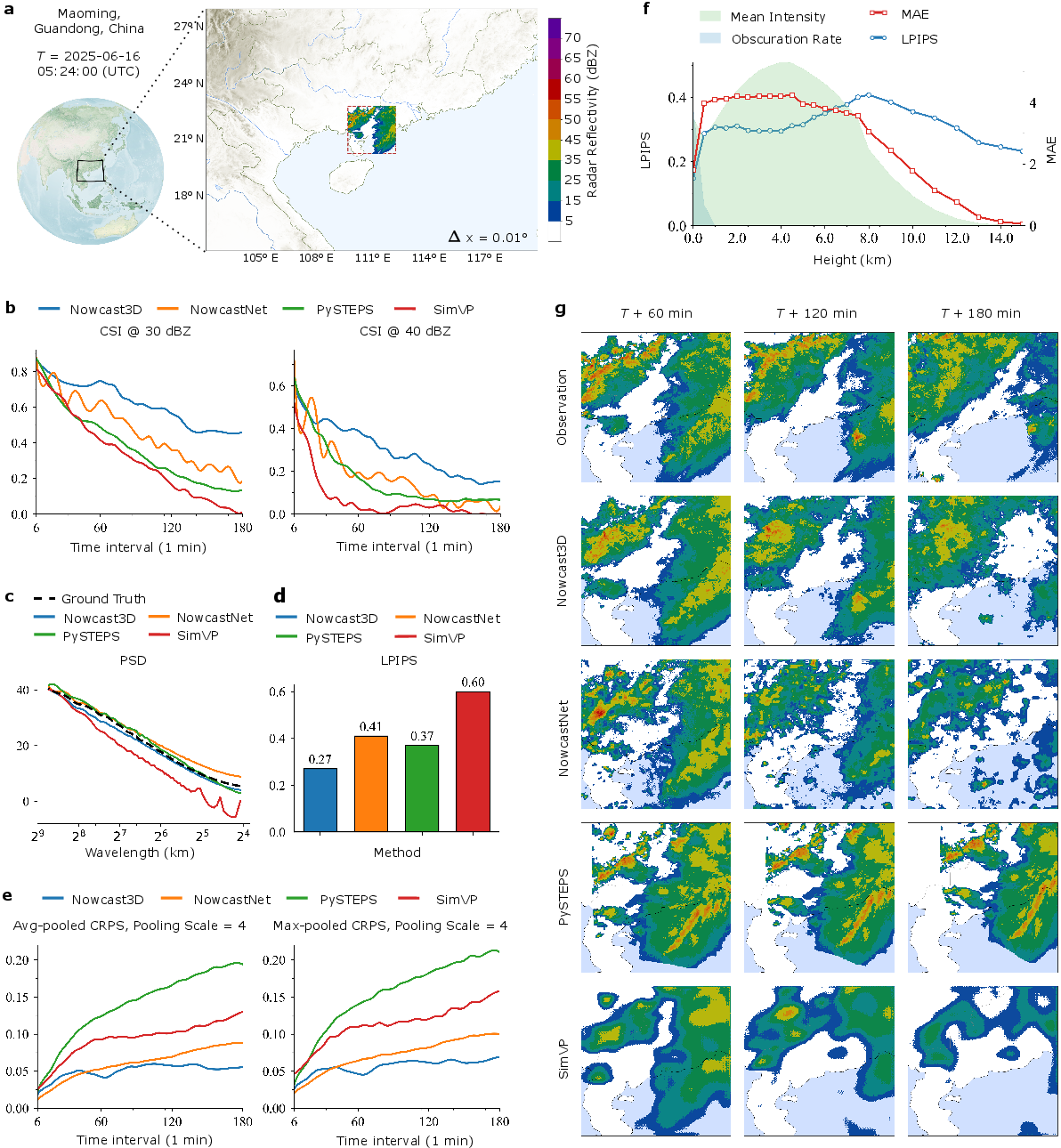
- Continuous Ranked Probability Score (CRPS): A proper scoring rule that evaluates the calibration and sharpness of probabilistic forecasts. "The Continuous Ranked Probability Score (CRPS) \cite{matheson1976scoring,hersbach2000decomposition} demonstrates that Nowcast3D produces better-calibrated forecasts than the ensemble based NowcastNet, indicating a more reliable quantification of uncertainty (Figure \ref{fig:maoming}e)."
- Critical Success Index (CSI): Event detection metric counting hits, misses, and false alarms, often with spatial tolerance. "we use the neighborhood Critical Success Index (CSI) \cite{jolliffe2011forecast}"
- Doppler radial velocity: The component of motion toward or away from the radar measured via the Doppler effect. "Integrating multi-modal observations, such as Doppler radial velocities, geostationary satellite imagery, and lightning data, could better constrain the inferred wind fields"
- Echo-top variability: Variation in the altitude of the highest detectable radar echoes, indicative of storm vertical structure. "echo-top variability, bright bands and layer-dependent reflectivity"
- Ensemble forecast: A set of multiple forecast realizations that sample uncertainty. "we produce a multi-member ensemble forecast that provides a principled quantification of forecast uncertainty."
- Geostationary satellite imagery: Observations from satellites fixed relative to Earth’s rotation, providing continuous views. "Integrating multi-modal observations, such as Doppler radial velocities, geostationary satellite imagery, and lightning data, could better constrain the inferred wind fields"
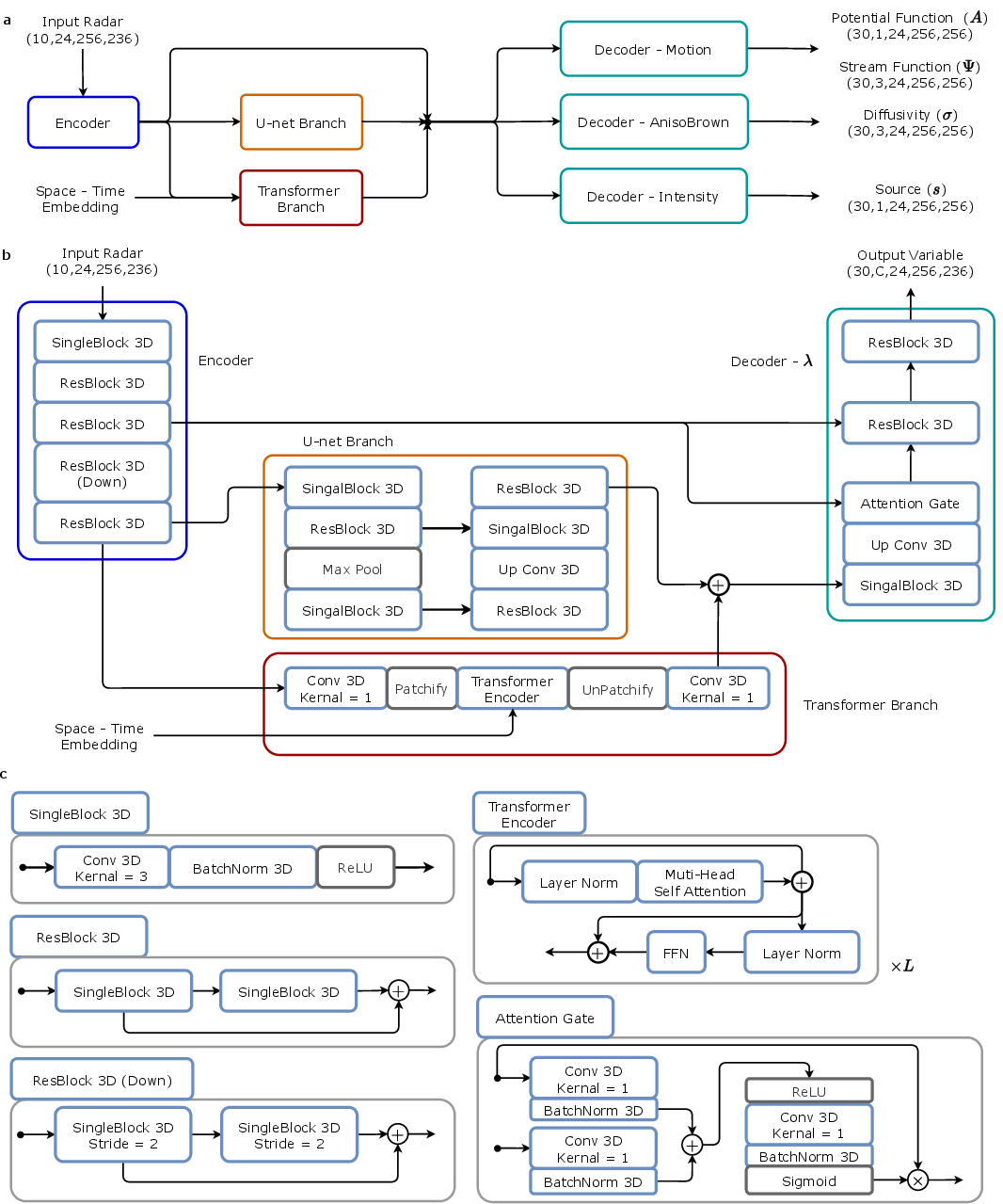
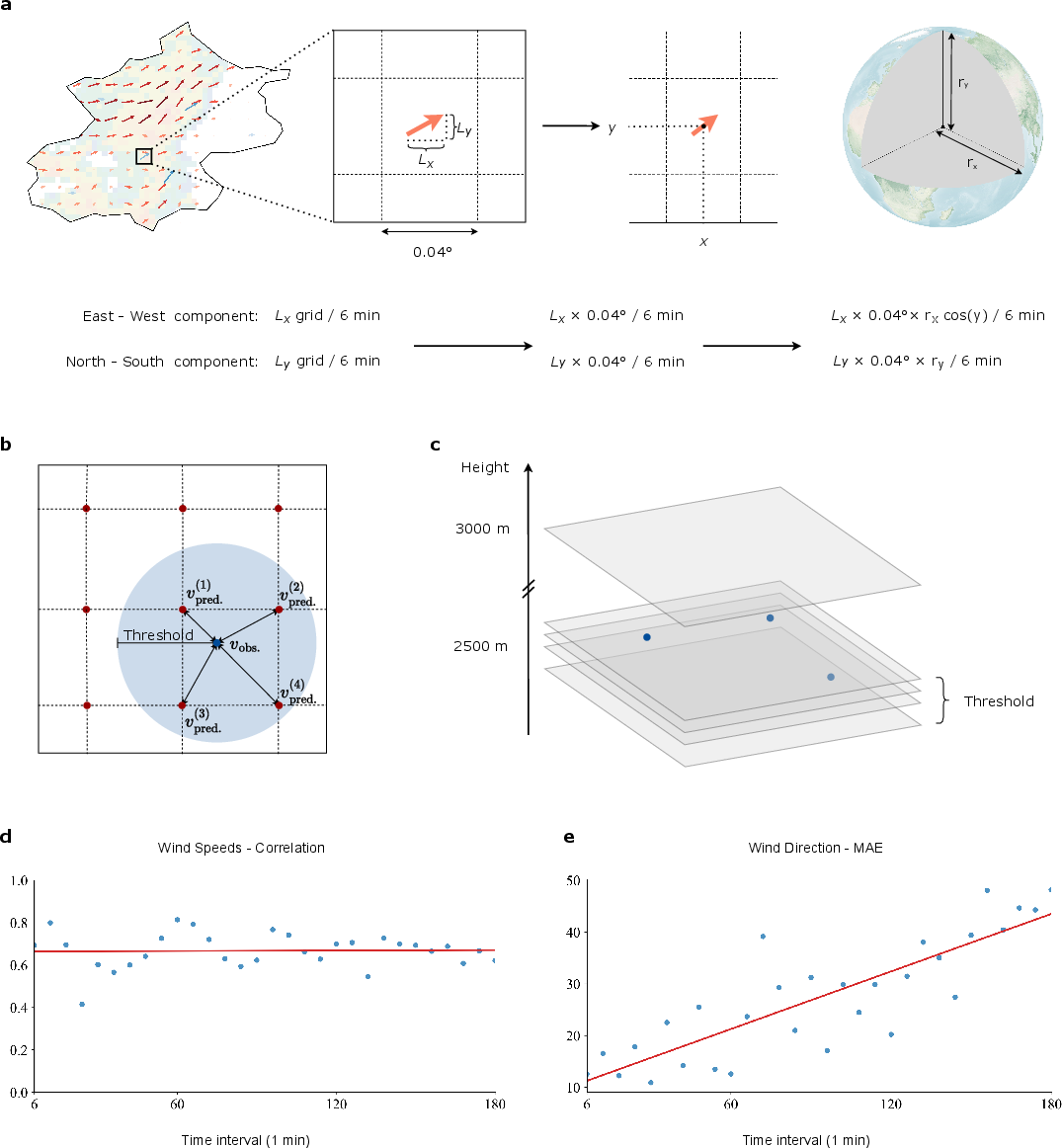
- Helmholtz decomposition: Decomposition of a vector field into gradient (potential) and curl (stream) components. "Helmholtz decomposition into stream and potential function components"
- Hydrometeors: Water particles suspended or falling in the atmosphere (rain, snow, hail). "advection, the transport of hydrometeors by the three-dimensional wind field;"
- Learned Perceptual Image Patch Similarity (LPIPS): Neural metric for perceptual similarity between images. "we employ the Learned Perceptual Image Patch Similarity (LPIPS) metric \cite{zhang2018unreasonable}, which was computed on 2D column-maximum projections for equitable comparison with 2D baselines."
- Meridional wind: The north–south component of the wind. "The predicted zonal (eastâwest) and meridional (northâsouth) wind components are compared against wind profiler observations at 60 minute."
- Mesoscale convective system: A large, organized complex of thunderstorms on the mesoscale. "Nowcast3D accurately forecasts the evolution of a severe mesoscale convective system."
- Microphysical tendency: Local reflectivity changes due to in situ mass and phase changes of hydrometeors. "the microphysical tendency, which comprises in situ mass and phase changes (Figure \ref{fig:model}a)"
- Monte Carlo: Sampling-based numerical method for approximating expectations. "In practice, the expectation in the diffusion step is approximated via a Monte-Carlo average over samples."
- Numerical Weather Prediction (NWP): Computational forecasting by integrating atmospheric governing equations. "Numerical weather prediction (NWP) remains indispensable from synoptic to subseasonal scales because it evolves the governing equations of motion and thermodynamics;"
- Operator-splitting scheme: Numerical integration strategy that applies sub-operators sequentially within each time step. "using an operator-splitting scheme, which incorporates the inferred physical fields at each forecast step."
- Potential-Stream Function Decomposition: Parameterization that reconstructs velocity from a scalar potential and a vector stream function. "which is then processed through a Potential-Stream Function Decomposition to reconstruct a complete and dynamically consistent velocity field."
- Power Spectral Density (PSD): Measure of how variance/power is distributed across spatial scales or frequencies. "we analyze the Power Spectral Density (PSD) \cite{sinclair2005empirical}, comparing the power ratios and spectral slopes of forecasts against observations from convective to mesoscale ranges."
- pySTEPS: An operational radar extrapolation system for motion-based nowcasting. "The operational convective extrapolation system pySTEPS \cite{pulkkinen2019pysteps} serves as a physics informed reference widely adopted by national meteorological services."
- Semi-Lagrangian scheme: Advection method that traces backward along flow trajectories to sample upstream states. "implemented using a robust semi-Lagrangian scheme."
- Volumetric radar reflectivity: Three-dimensional radar backscatter field closely related to precipitation intensity. "a deep learning framework for volumetric radar reflectivity forecasting."
- Wind profiler radar: Remote sensing instrument measuring vertical profiles of wind using Doppler techniques. "we compared the predicted winds with independent observations from wind profiler radars."
- Zonal wind: The east–west component of the wind. "The predicted zonal (eastâwest) and meridional (northâsouth) wind components are compared against wind profiler observations at 60 minute."
Collections
Sign up for free to add this paper to one or more collections.