Improving Multi-View Reconstruction via Texture-Guided Gaussian-Mesh Joint Optimization
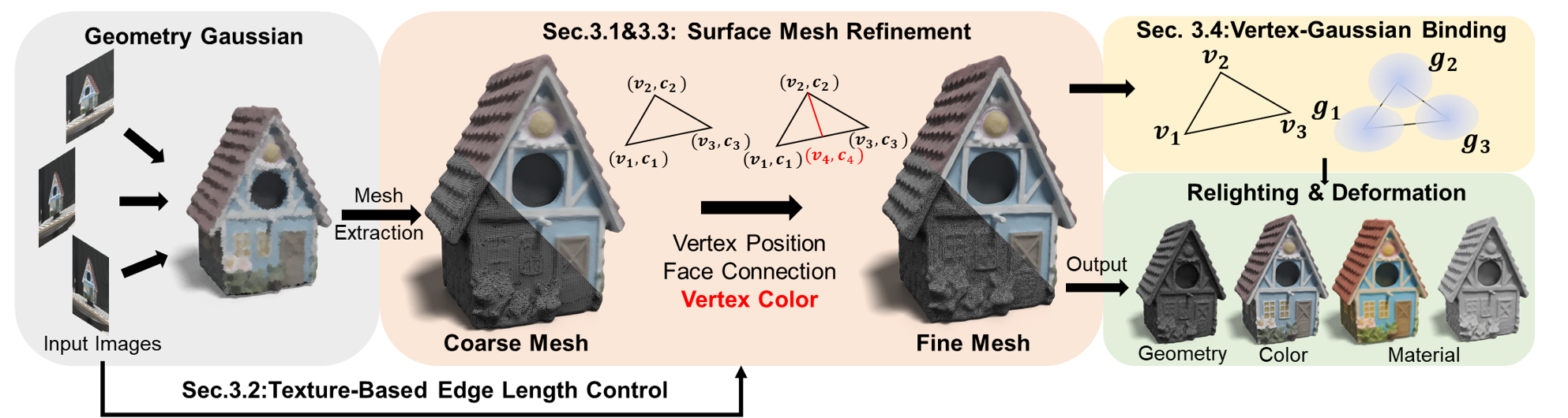
Abstract: Reconstructing real-world objects from multi-view images is essential for applications in 3D editing, AR/VR, and digital content creation. Existing methods typically prioritize either geometric accuracy (Multi-View Stereo) or photorealistic rendering (Novel View Synthesis), often decoupling geometry and appearance optimization, which hinders downstream editing tasks. This paper advocates an unified treatment on geometry and appearance optimization for seamless Gaussian-mesh joint optimization. More specifically, we propose a novel framework that simultaneously optimizes mesh geometry (vertex positions and faces) and vertex colors via Gaussian-guided mesh differentiable rendering, leveraging photometric consistency from input images and geometric regularization from normal and depth maps. The obtained high-quality 3D reconstruction can be further exploit in down-stream editing tasks, such as relighting and shape deformation. The code will be publicly available upon acceptance.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper is about turning many photos of a real object into a high-quality 3D model that is both accurate in shape and looks realistic. The authors want the final 3D model to be easy to edit—so you can change its shape (like bending it) and its appearance (like changing lighting or material) in a single, unified way.
Key Questions the Paper Tries to Answer
- How can we build a 3D model that has both precise geometry (shape) and realistic texture (appearance) at the same time?
- How can we make this 3D model easy to edit—for example, relight it (change light) or deform it (change shape)—without breaking how it looks?
- How do we avoid the usual problems where geometry and texture are optimized separately and become mismatched?
How the Method Works (Explained Simply)
Think of a 3D model as a “mesh,” like a net made of triangles wrapped around an object. Each corner of the triangles is a “vertex,” and each vertex can have a color. The paper combines this mesh with “Gaussians,” which you can imagine as tiny, soft blobs of color and light placed in 3D space. Here’s the approach:
Step 1: Build a starting 3D model from photos
- The method begins by using a technique called 3D Gaussian Splatting (3DGS). This makes the object look good from different viewpoints by placing lots of small colored blobs (Gaussians).
- From that, they create an initial mesh (the triangle net) using a standard tool (similar to carving a surface from a block of data).
- Importantly, they copy colors from the Gaussians onto mesh vertices so the mesh doesn’t just have shape—it also has color.
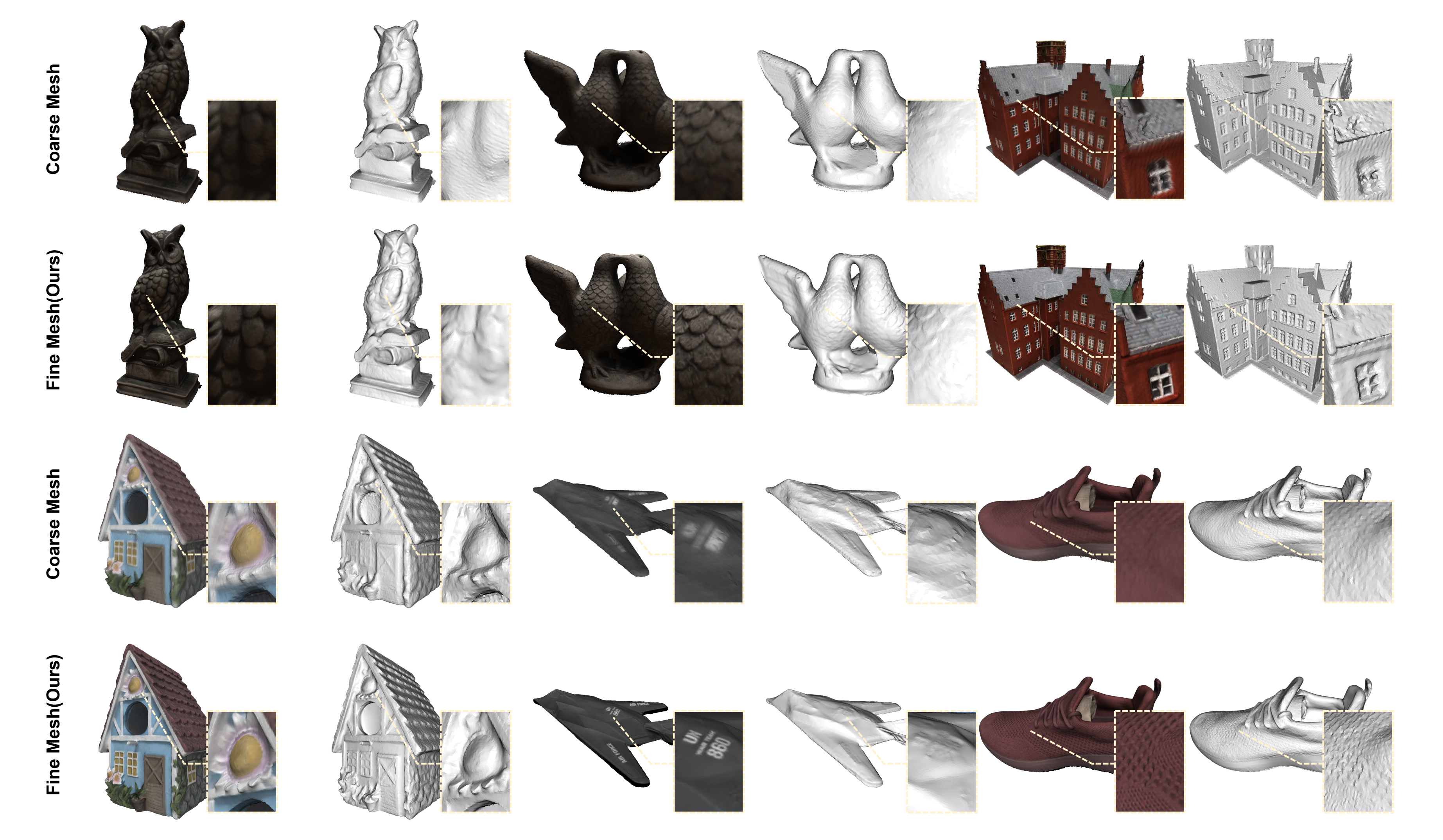
Step 2: Improve the mesh shape and colors together
- The mesh is refined using “remeshing” operations:
- Edge split: cut a long triangle edge into two shorter ones and blend colors at the new point.
- Edge collapse: merge a short edge into one point and blend colors there.
- Edge flip: swap triangle connections to improve quality while keeping colors stable.
- These operations adjust both shape and color, so geometry and appearance stay aligned.
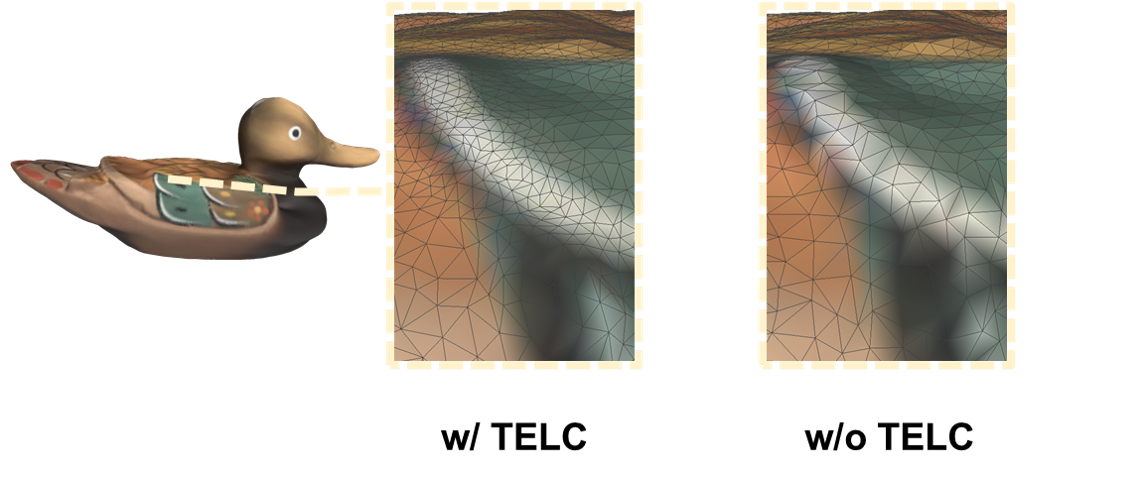
Step 3: Use texture to control triangle sizes (avoid color smearing)
- Some parts of the object have sharp color changes (like a stripe or text), even if the surface is smooth. Linear color between far-apart vertices can cause “color leakage.”
- To fix this, they measure how quickly colors change using a simple idea: look at tiny patches in the photos and compute “texture density” (with FFT, which you can think of as a way to detect patterns and sharp changes).
- Edges crossing high-detail areas get shorter triangles (more detail), while smooth areas get larger triangles. This keeps colors crisp where needed.
Step 4: Bind mesh vertices to Gaussians for editing
- Each mesh vertex is linked to a Gaussian. This means:
- If you move the mesh (bend or twist), the Gaussians follow.
- If you learn material properties (like how shiny or rough a surface is), you can send those back to the mesh.
- This “binding” lets shape and appearance edits stay in sync, which helps with tasks like relighting (changing light direction/color) and deformation (resizing, bending).
Optimization and “Inverse Rendering”
- The improved mesh is trained to match the input photos (photometric consistency) and to keep reasonable geometry using normal and depth cues (think of these as surface direction and distance maps).
- The loss (training signal) balances:
- RGB loss: make rendered images look like the photos.
- Geometry loss: keep the surface consistent with depth/normals from the starting mesh.
- Regularization: keep the mesh smooth and clean.
Main Findings and Why They Matter
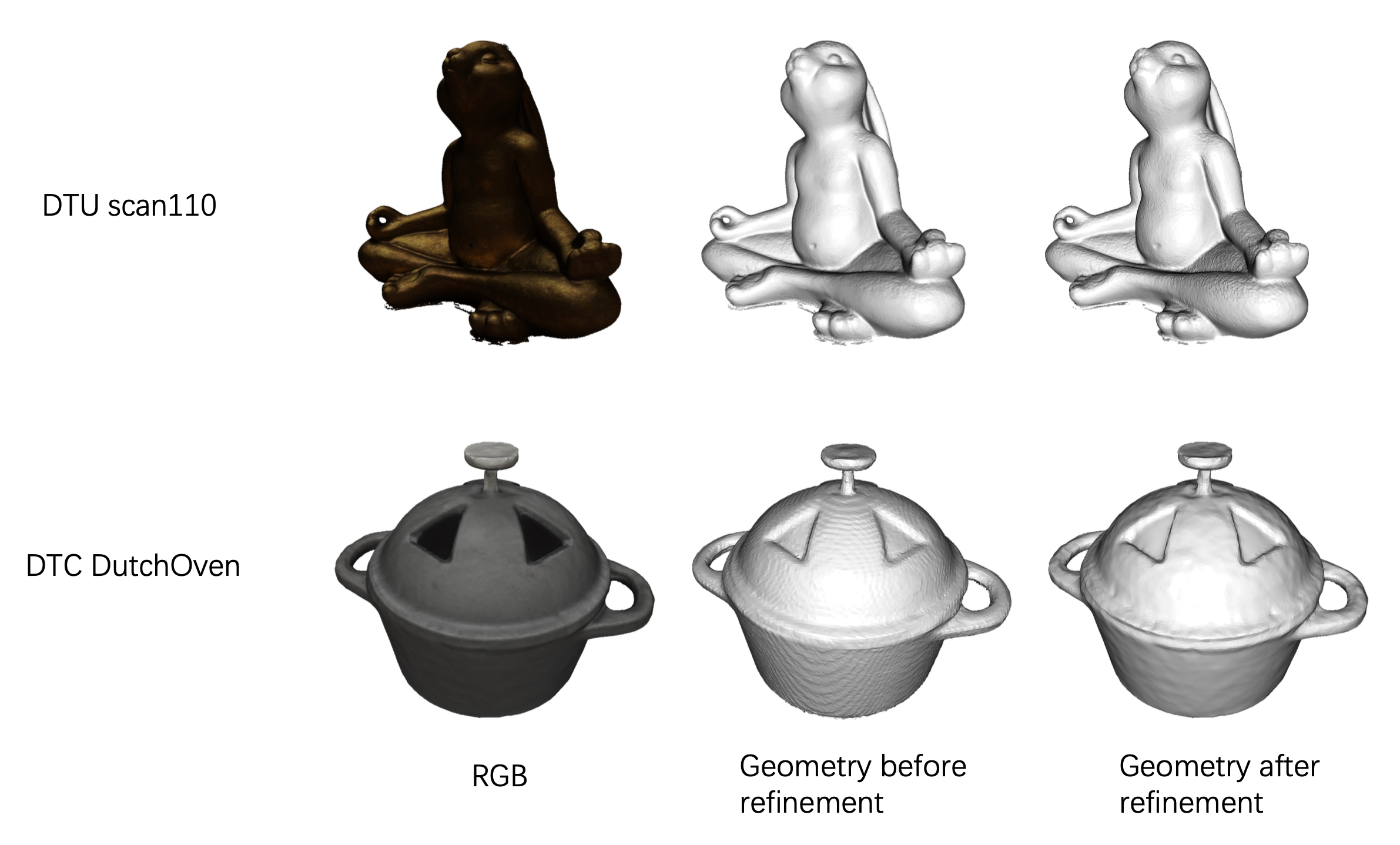
- Better shape accuracy: On standard datasets (DTU and DTC), their method reduces shape errors compared to several popular baselines. That means the mesh surface is closer to the real object.
- Better visual quality: Rendered images from the refined mesh look sharper and more detailed (higher PSNR/SSIM, lower LPIPS), recovering text and fine textures (like shoe patterns).
- Faster and “plug-and-play”: The refinement is relatively quick and can be added on top of different existing 3DGS-based methods.
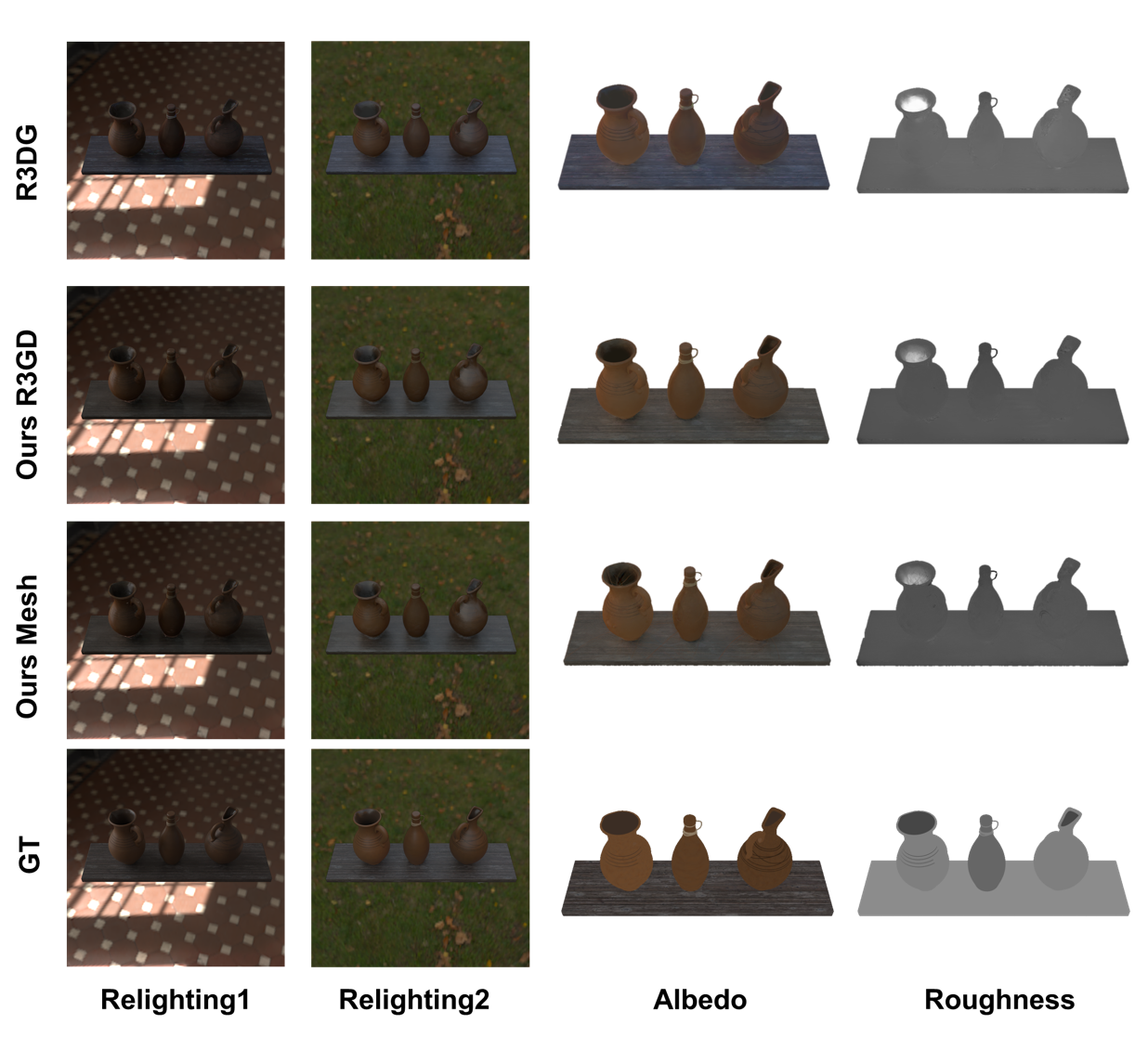
- Improved relighting: When they initialize a relighting system (R3DG) with their mesh-Gaussian binding, the relit results look more realistic and material estimates (like albedo and roughness) are more accurate, often in less time.
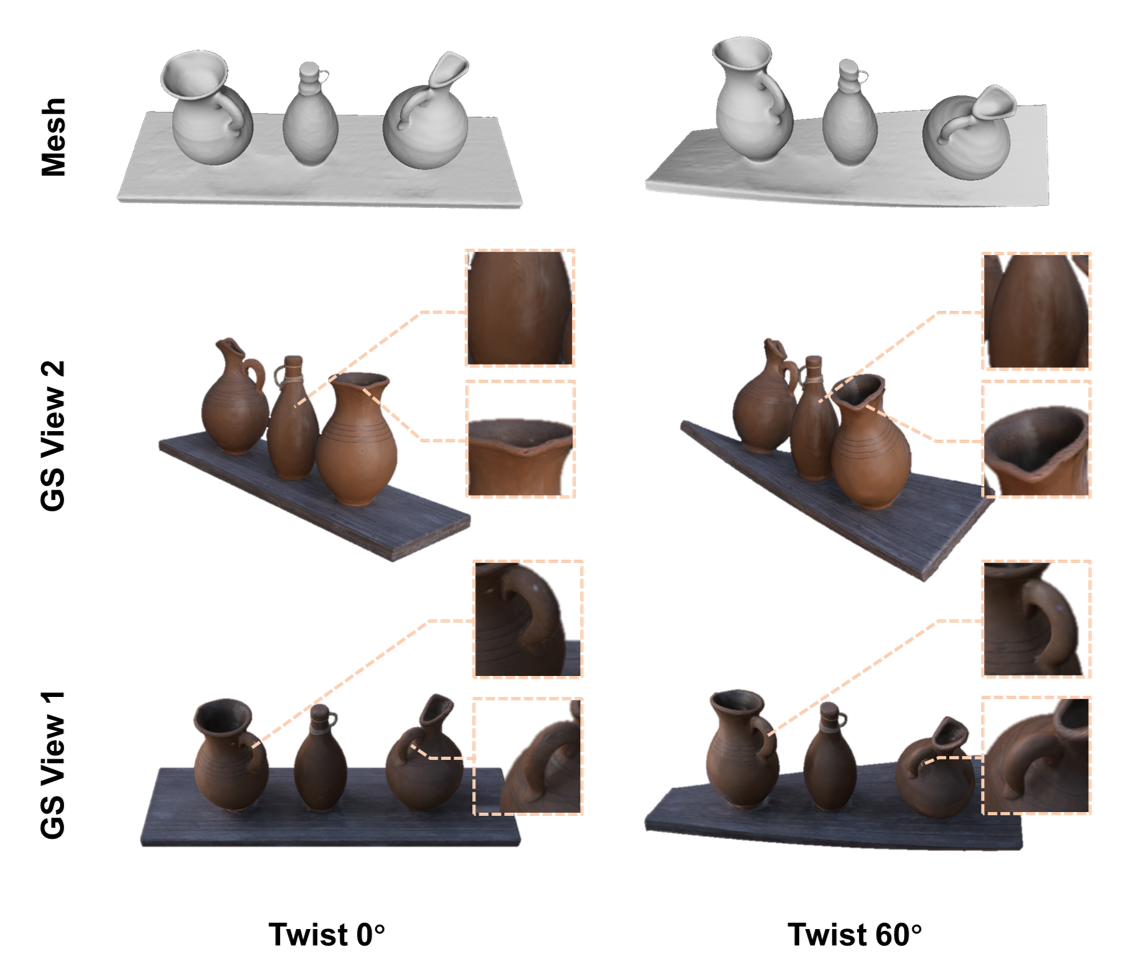
- Consistent deformation: When the mesh shape is twisted or bent, the Gaussians follow smoothly, preserving highlights and shadows correctly. This means edits don’t break the realism.
Implications and Impact
This work makes it easier to create 3D models from photos that you can both reshape and relight without losing realism. That’s useful for:
- AR/VR experiences where objects need to be interactive.
- Film and game production where artists need accurate models they can easily edit.
- 3D content creation and digital twins, where faithful geometry and appearance are both essential.
Limitations: The method is less effective when the original photos have poor lighting, making it harder to estimate textures and geometry well. Future work could handle dynamic scenes and enable real-time collaborative editing.
In short, the paper shows how to keep the object’s shape and look tightly connected during reconstruction and editing, leading to more reliable and flexible 3D models.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
The paper leaves the following concrete gaps and open questions that future work could address:
- Sensitivity to initial mesh quality: The pipeline depends on TSDF fusion and marching cubes over Gaussian reconstructions to produce the initial mesh and pseudo depth/normal supervision; the method’s robustness when the initial mesh is noisy, incomplete, or topologically incorrect is not quantified or mitigated.
- Bias from pseudo-labels: Using depth/normal maps rendered from the initial mesh for geometric regularization can anchor optimization to initial errors; strategies for re-estimating or debiasing these pseudo-labels during optimization are not explored.
- Photometric loss under varying illumination: RGB consistency is enforced without modeling lighting changes, exposure differences, white balance, or specular highlights across views; the method’s failure modes under non-Lambertian materials and varying illumination (beyond a brief note) remain unresolved.
- Explicit shading/reflectance modeling during refinement: The joint geometry-color optimization assumes per-vertex color with view-independent appearance; incorporating BRDF, SH-based view dependence, or learned appearance priors during mesh optimization is not addressed.
- Texture-based edge-length control (TELC) design: The FFT-based frequency measure uses fixed 3×3 patches and per-vertex averaging; the approach’s sensitivity to noise, aliasing, exposure variation, perspective distortion, and occlusions is unquantified, and multi-scale, orientation-aware, or gradient-based alternatives are not compared.
- TELC triggering stability: The remeshing condition scales by (1 − F_l); when F_l → 1, thresholds approach zero, potentially over-triggering splits/collapses; safeguards (e.g., minimum thresholds, hysteresis, or per-region caps) and their impact on mesh stability are not analyzed.
- Edge flip scheduling: Flips are applied intermittently to avoid color jumps, but no criterion or adaptive schedule is provided; an automatic, appearance- and curvature-aware flip policy remains to be developed and validated.
- Topological and manifold guarantees: The remeshing operations (split/collapse/flip) lack explicit checks for non-manifold configurations, self-intersections, and degenerate faces; formal constraints or repair mechanisms are not described.
- Robustness to camera pose errors: The pipeline assumes accurate extrinsics; effects of pose noise and strategies for joint pose/refinement or pose correction are not investigated.
- Visibility and occlusion handling in back-projection: Vertex visibility sets vis(p) are derived from the mesh, but handling of occlusions, grazing angles, and view-dependent coverage is unspecified; a principled visibility weighting remains open.
- Color consistency and calibration across views: No color calibration, exposure normalization, or tone mapping is applied before photometric loss and texture density computation; the impact on reconstruction and TELC decisions is not tested.
- Per-vertex color limitations: While TELC mitigates artifacts, per-vertex color remains limited for high-frequency textures; comparisons with UV texture maps, per-face textures, or neural textures (and trade-offs in memory/quality/editability) are missing.
- Loss formulation and robustness: The exact RGB/geometric/regularization loss forms (e.g., robust penalties, occlusion masks, visibility weighting) are deferred to the Supplement; ablations do not cover outlier handling (specularities, cast shadows) or per-view confidence weighting.
- Convergence guarantees and failure modes: Optimization stability, convergence criteria, and failure cases beyond “poor lighting” are not theoretically or empirically analyzed (e.g., oscillations, over-refinement, over-smoothing).
- Parameter selection and auto-tuning: Edge length bounds, tolerance ε, and loss weights are hand-tuned; automatic, data-driven, or per-region adaptive parameter selection is not provided.
- Scalability and performance on large scenes: Experiments focus on single-object DTU/DTC; the approach’s behavior on full, cluttered, multi-object scenes with millions of vertices/Gaussians and real-time constraints is untested.
- Segmentation/background handling: The pipeline presumes the target object is isolated; procedures for object segmentation, background removal, and multi-object interactions during photometric/geometric optimization are not included.
- Extension beyond Gaussian-based meshes: The method is “plug-and-play” for GS-based reconstructions, but integration with SDF-based pipelines (NeuS/Neuralangelo) for joint optimization—not just post-extraction—is left unexplored.
- Binding scheme assumptions: The vertex–Gaussian binding sets opacity to a constant (0.9) and maps low-order SH from vertex colors; handling transparency, subsurface scattering, and more faithful SH/material initialization is not addressed.
- Dynamic Gaussian topology during relighting: Many GS pipelines add/prune Gaussians during training; maintaining one-to-one vertex–Gaussian correspondences under dynamic topology (and re-binding strategies) remains an open problem.
- Scale/rotation derivation for bound Gaussians: Scale from “local edge projections on the tangent plane” and rotation from normals/tangents are briefly stated; numerical stability, continuity under deformation, and effects on shading are not analyzed.
- Quantitative evaluation of deformation and relighting: Deformation results are qualitatively assessed; no metrics for material consistency, highlight/shadow coherence, or photometric error after large deformations are provided.
- Trade-off in NVS metrics: The R3DG-initialized relighting improves some metrics but reduces NVS PSNR compared to vanilla R3DG; the cause, generality, and mitigation of this trade-off are not examined.
- Multi-material and challenging reflectance: Generalization to metals, glossy, translucent, or textured materials with severe view dependence is not systematically evaluated.
- Robust handling of extreme texture/geometry boundaries: Although TELC helps, failure modes near sharp albedo edges with smooth geometry (and vice versa) need more targeted strategies (e.g., edge-aware remeshing, joint texture–geometry boundary detection).
- Reproducibility and code availability: Code is promised upon acceptance; precise implementation details (loss forms, visibility, remeshing policies) and standardized scripts for reproducing results across datasets are needed for reliable replication.
Practical Applications
Overview
This paper introduces a unified framework for joint geometry–appearance optimization of meshes reconstructed from multi-view images, leveraging 3D Gaussian Splatting (3DGS) as initialization. Key innovations include:
- Texture-guided remeshing (TELC) that adapts mesh resolution using FFT-based texture density.
- Differentiable inverse rendering to jointly optimize vertex positions and per-vertex color under photometric and geometric constraints.
- Vertex–Gaussian binding to synchronize mesh edits (deformations, relighting) with bound Gaussian parameters.
Below are actionable, real-world applications derived from the findings, methods, and innovations, grouped into immediate and long-term categories.
Immediate Applications
The following items can be deployed now with existing tools and moderate engineering integration.
- Texture-Guided Remeshing Plugin for DCC tools
- Sector: software (content creation, VFX), gaming, AR/VR
- Description: A plugin for Blender/Maya/Houdini that ingests multi-view photos, runs a GS-based reconstruction (3DGS/2DGS/GOF/PGSR), applies the paper’s inverse-rendering optimization with TELC, and outputs an editable mesh with per-vertex colors and an optional bound Gaussian representation.
- Expected tools/products/workflows: “Gaussian–Mesh Optimizer” add-on; batch pipeline for asset teams; texture-aware mesh refinement pass in studio ingest pipelines.
- Assumptions/dependencies: Requires camera poses or reliable SfM; good multi-view coverage and lighting; a CUDA-capable GPU; static scenes; per-vertex color is used (UV baking optional downstream).
- Faster, More Editable Asset Prep for VFX and Game Engines
- Sector: film/VFX, gaming
- Description: Replace NeRF-only mesh extraction with the paper’s joint optimization to obtain high-fidelity, editable meshes that preserve fine detail and texture edges. Use vertex–Gaussian binding to maintain physically consistent relighting after mesh deformation.
- Expected tools/products/workflows: Unreal/Unity importer that auto-binds Gaussians to mesh vertices; a “relight-and-deform” control layer for lookdev.
- Assumptions/dependencies: GS initialization; renderer consistency between engine and GS backend; materials limited to opaque/rough dielectric models; performance depends on GPU resources.
- E-commerce Product Digitization with Fine Detail Preservation
- Sector: retail/e-commerce
- Description: Capture products via smartphone turntable or handheld multi-view imaging, then run TELC + inverse rendering to produce crisp, web-ready meshes with improved geometry and textures (logos, seams, complex patterns).
- Expected tools/products/workflows: “Product 3D Builder” pipeline; automatic mesh clean-up and texture baking; configurable relighting for product configurators.
- Assumptions/dependencies: Controlled lighting improves results; good coverage around the object; UV unfolding or texture baking needed if per-vertex color is not suitable for platforms.
- Cultural Heritage and Museum Artifact Digitization
- Sector: cultural heritage, education
- Description: Generate high-fidelity, edit-ready meshes from multi-view museum captures; preserve texture boundaries (e.g., inscriptions, patina) via TELC; enable gentle relighting and small deformations for interpretive visuals.
- Expected tools/products/workflows: Conservation-friendly capture kits; mesh refinement services; archival pipelines with editable assets.
- Assumptions/dependencies: Non-invasive imaging in controlled lighting; accurate camera calibration; static artifacts; performance may degrade under poor lighting.
- Robotics Simulation Asset Creation with Photorealistic Appearance
- Sector: robotics
- Description: Produce physically compatible meshes (explicit topology) with accurate appearance from household/warehouse objects for simulators (Isaac Sim, Gazebo). TELC preserves appearance edges relevant for vision.
- Expected tools/products/workflows: “Perception Asset Factory” that outputs meshes with baked materials; domain randomization with cohesive geometry–appearance.
- Assumptions/dependencies: Static scenes; final models may need UV textures/material conversion; transparent/translucent materials not handled out of the box.
- Real Estate and Interior Design Scanning for Interactive Staging
- Sector: real estate, AEC (architecture/engineering/construction)
- Description: Multi-view scanning of rooms or furnishings to produce meshes that can be relit in-browser or edited; supports rearrangements with consistent relighting via vertex–Gaussian binding.
- Expected tools/products/workflows: WebGL/WebGPU viewers with relight sliders; staging tools that edit shape/pose with photometric consistency.
- Assumptions/dependencies: Static captures; sufficient coverage; limited handling of large specular/transparent surfaces; per-vertex color may be converted to textures.
- 3D Printing and Reverse Engineering from Consumer Scans
- Sector: manufacturing, maker communities
- Description: Generate cleaner meshes suitable for printing (by reducing geometric blur, preserving edges). Downstream UV/texturing pipelines can bake per-vertex color if color prints are needed.
- Expected tools/products/workflows: “Scan-to-Print” pipeline; repair tools that convert per-vertex color to UV textures; STL/OBJ export with topology-aware remeshing.
- Assumptions/dependencies: Watertightness and manifoldness checks needed; color printing requires texture baking; exact dimensional accuracy depends on camera calibration.
- Educational Use in Computer Graphics/CV Courses
- Sector: education, academia
- Description: Teaching modules on inverse rendering, differentiable rasterization, and texture-aware remeshing; students can capture objects and observe geometry–appearance co-optimization.
- Expected tools/products/workflows: Course labs with provided code; visualizations of FFT-based texture density; benchmarking assignments on DTU/DTC subsets.
- Assumptions/dependencies: Access to GPU; datasets and camera calibration; code availability as stated (“upon acceptance”).
- Relighting and Material Editing for Advertising and Catalog Production
- Sector: advertising, media production
- Description: Integrate the paper’s vertex–Gaussian binding with R3DG to improve material parameter learning and relighting fidelity while reducing computation time. Enables rapid scene relighting for campaigns.
- Expected tools/products/workflows: “Relight Studio” that takes refined meshes and outputs renders under target lighting; batch relighting for A/B visual tests.
- Assumptions/dependencies: R3DG or similar material estimation; relatively simple reflectance models (non-translucent); renderer discrepancy requires smoothing (as in the paper).
- Digital Twin Asset Hygiene and Quality Control
- Sector: manufacturing/industry, digital twins
- Description: Improve consistency between explicit meshes and implicit appearance for asset libraries; TELC reduces texture leakage across mesh patches; supports coherent updates when geometry changes.
- Expected tools/products/workflows: “Mesh QA” pipeline stage; asset governance dashboards that flag poor lighting or insufficient coverage.
- Assumptions/dependencies: Static assets; controlled capture; business processes for asset versioning.
Long-Term Applications
The following items are promising but require further research, scaling, or productization (e.g., real-time performance, dynamic scenes, broader material models, standardization).
- Real-Time Mobile Capture and On-Device Optimization
- Sector: consumer software, AR/VR
- Description: On-device GS initialization with incremental texture-guided remeshing for live feedback during capture (mesh quality indicators, coverage prompts).
- Expected tools/products/workflows: Smartphone apps with GPU/Neural accelerators; pipeline that streams mesh updates as the user moves.
- Assumptions/dependencies: Efficient mobile differentiable rendering; power/battery constraints; robust pose estimation; incremental TELC.
- Dynamic Scene and Non-Rigid Object Reconstruction
- Sector: robotics, AR/VR, VFX
- Description: Extend joint optimization to moving/deforming objects with temporal consistency; learn per-frame Gaussians bound to meshes that handle motion and material changes.
- Expected tools/products/workflows: “Dynamic Gaussian–Mesh” APIs; temporal regularization losses; motion-aware TELC.
- Assumptions/dependencies: Accurate motion capture or correspondence; real-time differentiable rendering; handling of occlusions; new loss designs.
- Standardization of Gaussian–Mesh Hybrid Representations
- Sector: software standards, interoperability
- Description: A common format that encodes vertex-bound Gaussians, per-vertex color, and material SH coefficients for cross-tool interoperability (DCCs, engines, simulators).
- Expected tools/products/workflows: Open-source spec (akin to glTF extensions) for Gaussian-bound meshes; import/export pipelines.
- Assumptions/dependencies: Community adoption; reference SDKs; alignment across rendering backends.
- Cloud Services for Unified Capture-to-Editable Model Conversion
- Sector: SaaS, e-commerce, media
- Description: Upload multi-view captures; receive high-fidelity meshes plus bound Gaussians ready for relighting, deformation, and publishing to web viewers.
- Expected tools/products/workflows: “Scan Cloud” with queue-based GPU processing; APIs for batch jobs; templated relighting scenes.
- Assumptions/dependencies: Privacy/compliance; cost-effective GPU fleets; robust pose recovery at scale.
- Integration with CAD and Engineering Pipelines
- Sector: manufacturing, AEC
- Description: Bridge GS-informed meshes with feature-based CAD (e.g., fitting parametric features to refined meshes); enable tolerance checks against scanned parts.
- Expected tools/products/workflows: “Mesh-to-CAD Fit” modules; hybrid visualizations that combine parametric features and GS appearance.
- Assumptions/dependencies: Reliable feature extraction; segmentation of scanned parts; precise calibration for metrology-grade use.
- Healthcare Applications from Endoscopic/Laparoscopic Multi-View Video
- Sector: healthcare
- Description: Reconstruct organ surfaces from multi-view intraoperative video frames for surgical planning and education; apply texture-aware remeshing to preserve appearance boundaries relevant to tissue identification.
- Expected tools/products/workflows: “Surgical Surface Builder” with anonymization/compliance; integration into teaching simulators.
- Assumptions/dependencies: Clinical validation; safety and regulatory approval; robust handling of specularities, fluids, translucency; motion compensation.
- Robotics Online Model Updating with Consistent Relighting
- Sector: robotics
- Description: Use vertex–Gaussian binding to update object models as robots observe new views; ensure edits maintain coherent appearance for downstream detection and manipulation.
- Expected tools/products/workflows: On-robot incremental mesh optimization; consistency checks before pushing models to simulators.
- Assumptions/dependencies: Continuous calibration; efficient streaming optimization; safe deployment.
- Metaverse and XR Content Pipelines with Cohesive Editing
- Sector: AR/VR/metaverse
- Description: Unified geometry–appearance editing for user-generated content: drag-to-deform plus instant relight in immersive environments.
- Expected tools/products/workflows: XR authoring tools with Gaussian-bound meshes; collaborative multi-user editing backed by cloud optimization.
- Assumptions/dependencies: Low-latency optimization; shared standards; moderation and IP handling.
- Policy and Procurement Guidelines for Digital Twins
- Sector: policy/standards, public sector
- Description: Recommend that digital twin acquisitions include edit-ready meshes with appearance coherence (not just point clouds or implicit fields) to ensure downstream utility and longevity.
- Expected tools/products/workflows: RFP specs that require mesh–appearance joint optimization; compliance tests for asset delivery.
- Assumptions/dependencies: Stakeholder education; cost-benefit analyses; data governance.
- Sustainability-Oriented Compute Practices
- Sector: sustainability, enterprise IT
- Description: Replace slower NeRF pipelines with GS-based reconstruction plus short, targeted optimization (as shown in the paper) to reduce energy and cost per asset.
- Expected tools/products/workflows: “Green Asset Build” KPIs; dashboards tracking compute-time reductions across teams.
- Assumptions/dependencies: Measurable energy baselines; alignment with cloud providers; careful benchmarking to avoid quality regressions.
Notes on Feasibility and Limitations
- The method assumes static scenes, adequate multi-view coverage, and reasonably good lighting; performance degrades under poor lighting.
- Requires camera calibration (or reliable SfM) and a GPU for differentiable rendering optimization.
- Per-vertex color can introduce artifacts without TELC; UV/texture baking may be needed for certain downstream uses (web platforms, color 3D printing).
- Material models are simplified (e.g., low-order SH; constant opacity); translucent, highly specular, or volumetric materials need additional modeling.
- Vertex–Gaussian binding improves coherence for relighting and deformation but relies on consistent renderer assumptions and may need smoothing to mitigate discrepancies.
Glossary
- 2D Gaussian Splatting (2DGS): A surface/scene representation using 2D oriented Gaussian disks optimized for efficient rendering and reconstruction. "2D Gaussian Splatting (2DGS)\cite{Huang20242DGS} improves upon 3DGS by using 2D oriented planar Gaussian disks and employs TSDF fusion\cite{curless1996volumetric}."
- 3D Gaussian Splatting (3DGS): An explicit 3D representation that optimizes Gaussian primitives via differentiable rasterization for fast, high-quality novel view synthesis. "3D Gaussian Splatting (3DGS)\cite{Kerbl20233DGS} optimizes an explicit representation through differentiable rasterization, which not only significantly enhances training speed but also improves the quality of novel view synthesis."
- Albedo: The intrinsic, view- and light-independent color of a surface used in material decomposition. "As presented in Tab. \ref{table:relight}, our version of initialization helps to improve relighting, albedo and roughness precision in the framework of R3DG."
- Chamfer Distance: A symmetric distance measure between two point sets/meshes commonly used to evaluate reconstruction accuracy. "We first compare against SOTA implicit and explicit methods on Chamfer Distance and training time using the DTU dataset in Tab.~\ref{table:dtugeo}."
- ContinuousRemeshing: An inverse-rendering based mesh optimization framework that adaptively refines geometry to match target image-space cues. "For mesh refinement, we adopt the framework of ContinuousRemeshing~\cite{palfinger2022continuous}, which leverage inverse rendering technique~\cite{Laine2020diffrast} to remesh a sphere to a target mesh."
- DMTet: A differentiable tetrahedral grid framework (Deep Marching Tetrahedra) used for mesh extraction and optimization. "Gaussian Opacity Field (GOF)\cite{Yu2024GaussianOF} provides a tetrahedron grid-based technique based on DMTet\cite{shen2021deep} instead of Poisson reconstruction and TSDF fusion."
- Differentiable rasterization: A rendering process whose outputs are differentiable w.r.t. scene parameters, enabling gradient-based optimization. "3D Gaussian Splatting (3DGS)\cite{Kerbl20233DGS} optimizes an explicit representation through differentiable rasterization"
- Differentiable rendering: Rendering formulations that provide gradients from image comparisons back to scene parameters for joint optimization. "via Gaussian-guided mesh differentiable rendering"
- Fast Fourier transform (FFT): An algorithm to convert spatial signals to frequency domain for analyzing local texture frequencies. "then perform Fast Fourier transform (FFT) and compute the magnitude of the FFT output"
- Gaussian Mesh Splatting: A hybrid technique fusing Gaussian splatting with mesh structures to improve appearance and deformation coherence. "Gaussian Mesh Splatting \cite{Gao2024MeshbasedGS} also explores the fusion of Gaussian splatting with mesh representations, primarily focusing on how to deform Gaussians in accordance with mesh transformations, thereby enabling dynamic scene rendering and deformation."
- Gaussian Opacity Field (GOF): A tetrahedral-grid based method that recovers surfaces/meshes from Gaussian representations via an opacity field. "Gaussian Opacity Field (GOF)\cite{Yu2024GaussianOF} provides a tetrahedron grid-based technique based on DMTet\cite{shen2021deep} instead of Poisson reconstruction and TSDF fusion."
- Inverse rendering: The process of estimating scene geometry/materials by optimizing them to match rendered images to observations. "which leverage inverse rendering technique~\cite{Laine2020diffrast} to remesh a sphere to a target mesh."
- Laplacian smoothing: A mesh regularization technique that penalizes high-frequency variations in vertex positions to enforce smoothness. "which includes Laplacian smoothing and mesh normal consistency."
- Marching cubes algorithm: A standard algorithm for extracting isosurfaces (meshes) from volumetric fields like TSDF/SDF grids. "and finally obtain the initial mesh with marching cube algorithm."
- Mesh Laplacian: The discrete Laplace operator on meshes used for smoothing or regularization of vertices and normals. "the remeshed vertex positions and normals are smooth regarding mesh Laplacian."
- Multi-View Stereo (MVS): A class of methods that reconstruct dense geometry from multiple calibrated views using triangulation and appearance cues. "classical multi-view stereo (MVS) approaches~\cite{Snavely2006, furukawa2009accurate,Lowe2004,Schonberger2016,Kutulakos2000,Newcombe2011} primarily focus on reconstructing dense point clouds from triangulation guided by photometric consistency"
- Neural Radiance Fields (NeRF): A neural volumetric representation that maps 3D coordinates and view direction to color and density, enabling novel view synthesis. "Neural Radiance Fields (NeRF) \cite{mildenhall2021nerf} represent a scene as a continuous volumetric function using a neural network that predicts the color and density for points in 3D space, enabling photo-realistic novel view synthesis."
- Neural View Synthesis (NVS): Methods focused on rendering novel viewpoints with high fidelity, often decoupled from explicit mesh extraction. "Neural View Synthesis (NVS) methods\cite{mildenhall2021nerf,muller2022instant,barron2021mip,yu2024mip,Kerbl20233DGS} have gained considerable popularity in computer vision, which predominantly focus on producing high-fidelity novel view renderings."
- Neuralangelo: A learning-based surface reconstruction method that accelerates training via multi-resolution hash encodings. "NeuS2\cite{Wang2022NeuS2FL} and Neuralangelo\cite{Li2023NeuralangeloHN} integrate multi-resolution hash encodings and accelerate training."
- NeuS: A surface reconstruction approach modeling the surface as the zero-level set of an SDF with a tailored volume rendering formulation. "NeuS\cite{Wang2021NeuSLN} represents surfaces as the zero-level set of SDF and introduces a new volume rendering formulation to reduce geometric bias inherent in conventional volume rendering."
- Photometric consistency: The assumption that corresponding points across views have consistent appearance, used to guide optimization. "leveraging photometric consistency from input images and geometric regularization from normal and depth maps."
- Planar Gaussian disks: 2D oriented Gaussian primitives used in 2DGS to model surfaces efficiently. "2D oriented planar Gaussian disks"
- Poisson reconstruction: A technique to reconstruct watertight surfaces from oriented points by solving a Poisson equation. "SuGaR\cite{Gudon2023SuGaRSG} and Gaussian Surfels\cite{Dai2024HighqualitySR} regulate Gaussians and extract meshes by Poisson reconstruction\cite{kazhdan2006poisson} technique."
- Rasterization function: The function/operator that projects geometry to the image plane to produce color/depth/normal buffers. "Via rasterization function , we can compute"
- Relighting: Re-rendering a scene/object under novel lighting by estimating/using material and lighting parameters. "The obtained high-quality 3D reconstruction can be further exploit in down-stream editing tasks, such as relighting and shape deformation."
- Signed Distance Field (SDF): A scalar field giving the signed distance to the surface, with zero at the surface. "rely on signed distance field(SDF)\cite{osher2004level} representation for geometry extraction and appearance association."
- Spherical Harmonics (SH) coefficients: Coefficients of SH basis functions used to represent view-dependent color/lighting on Gaussians. "Spherical Harmonics (SH) coefficients: In our method, we assign the low-order SH coefficients directly from the vertex color , and set the higher-order coefficients to zero."
- Texture baking: Projecting or precomputing appearance onto mesh textures/UVs, often as a post-processing step. "appearance alignment to post-processing(e.g., texture baking~\cite{furukawa2009accurate})."
- Texture-based Edge Length Control (TELC): A scheme that adjusts target edge lengths during remeshing using texture frequency to prevent color artifacts. "we further propose a Texture-based Edge Length Control (TELC) scheme to robustify our remeshing pipeline."
- Truncated Signed Distance Function (TSDF): A signed distance field whose values are truncated to a finite range, useful for robust fusion from depth. "then compute TSDF upon the 3DGS representation"
- TSDF fusion: The process of integrating multiple depth observations into a volumetric TSDF grid. "employs TSDF fusion\cite{curless1996volumetric}"
- Vertex-Gaussian binding: A correspondence scheme that attaches Gaussians to mesh vertices to synchronize geometry and appearance edits. "we further propose a vertex-Gaussian binding scheme, so that the improved geometry can be transferred to the bound Gaussian"
- Volume rendering: Rendering by integrating color/density along camera rays through a volumetric field. "introduces a new volume rendering formulation to reduce geometric bias inherent in conventional volume rendering."
- Zero-level set: The locus where an implicit function (e.g., SDF) equals zero, defining the reconstructed surface. "represents surfaces as the zero-level set of SDF"
Collections
Sign up for free to add this paper to one or more collections.