- The paper demonstrates closed-loop control for non-contact handling of induced magnetic dipoles via real-time feedback, enabling precise 3D positioning.
- It employs a custom five-coil electromagnet array with integrated EKF, PID, and SQP inversion, reducing RMSE from 2.3 mm to 0.4 mm.
- Experiments reveal power-efficient strategies and robust recovery from coil-switching events, highlighting applications in space debris recycling.
Introduction and Motivation
This paper presents a comprehensive study of closed-loop control for non-contact manipulation of conductive, non-magnetic objects via induced magnetic dipoles. The primary application context is the recycling of space debris, specifically the dexterous handling of aluminum in microgravity environments. The work extends prior open-loop control approaches by integrating real-time feedback and advanced control strategies, enabling robust 3D positioning of conductive samples subject to oscillating magnetic fields. The experimental platform is a custom five-coil electromagnet array, calibrated for precise field generation and equipped with multi-camera feedback for state estimation.
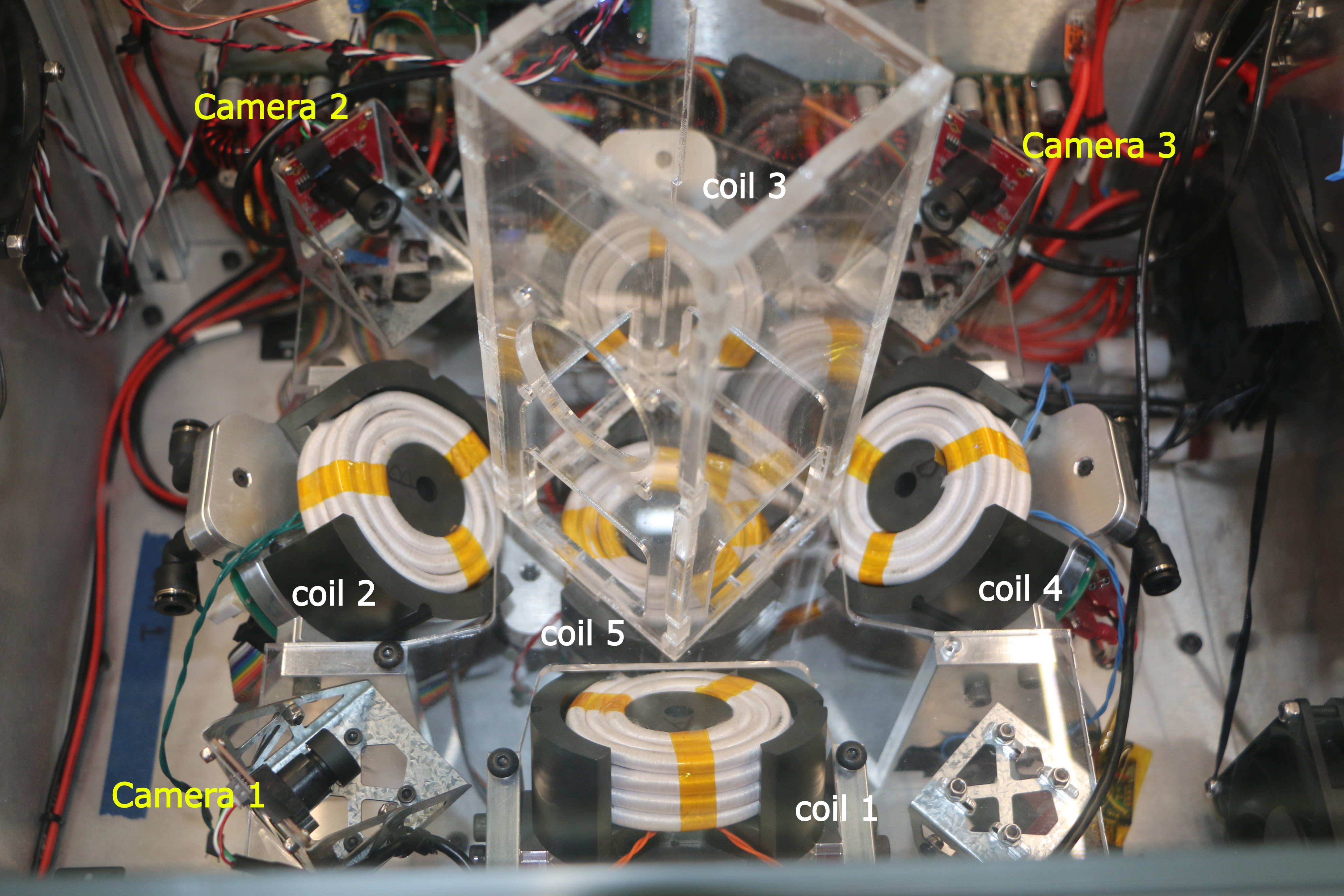
Figure 1: Five-coil electromagnet array with camera-based feedback for object detection and manipulation.
Theoretical Model and Force Computation
The interaction model is grounded in electromagnetic theory, leveraging Faraday's law to induce eddy currents in conductive spheres. The induced dipole moment is analytically derived using spherical Bessel functions and complex propagation constants, resulting in a compact expression for the time-averaged force:
Fˉ=2α[BI]fGI
where α encapsulates the dipole gain and phase shift, B and G are the actuation matrices for field and gradient contributions, and I is the coil current vector. The model supports superposition, enabling flexible field shaping with multiple coils. Calibration is performed via nonlinear least squares fitting to measured field data, achieving high fidelity (R2=0.988) except near the workspace floor.
To simulate microgravity, hollow aluminum spheres are partially filled with water and submerged in a bath, achieving effective weights on the order of tens of micro-newtons. This setup allows the electromagnetic array to levitate and manipulate the samples under terrestrial conditions.
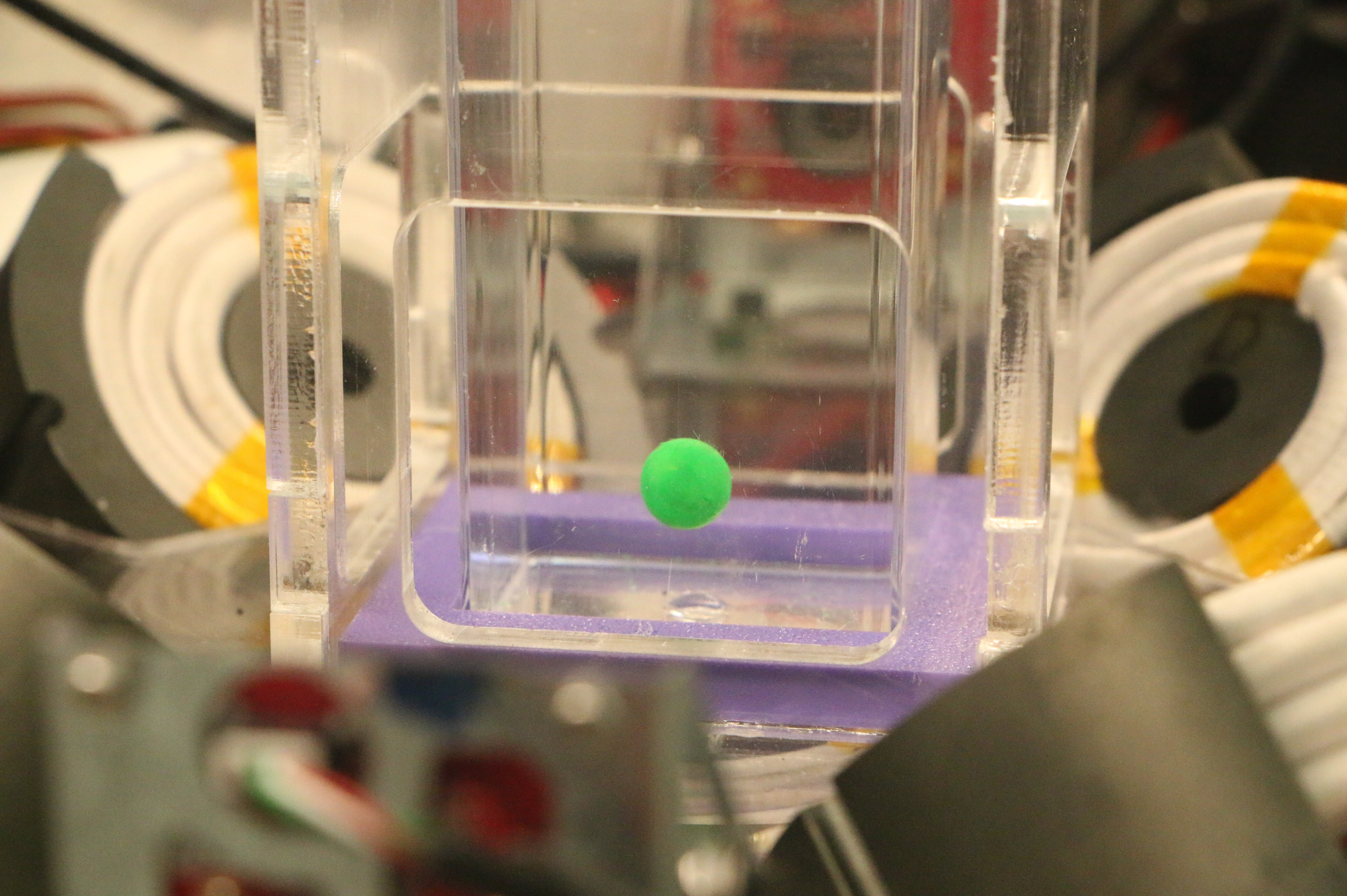
Figure 2: Laboratory simulation of low-gravity using semi-buoyant aluminum spheres in a water bath.
Closed-Loop Control Architecture
The control system employs an Extended Kalman Filter (EKF) for state estimation, fusing multi-camera positional data. A PID controller computes the required magnetic force to minimize trajectory error, and a Sequential Quadratic Programming (SQP) solver inverts the force equation to determine optimal coil currents, subject to hardware constraints.
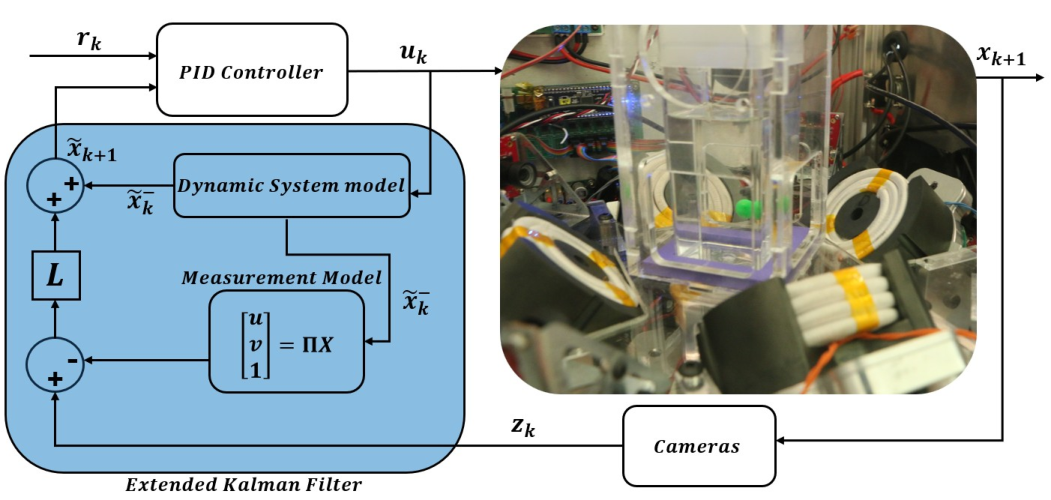
Figure 3: Closed-loop control architecture integrating EKF, PID, and SQP-based force inversion.
Trajectory Planning and Control Strategies
Experiments are conducted on a standardized 3D cube trajectory, with samples drawing squares at two elevations. Three closed-loop control strategies are evaluated:
- Minimizing Change in Current: Reference current set to previous value, reducing coil-switching events.
- Minimizing Overall Current: Reference current set to zero, optimizing for power efficiency.
- Reference Current Tracking: Reference current follows a precomputed open-loop stable trajectory.
Open-loop control is also tested for baseline comparison.
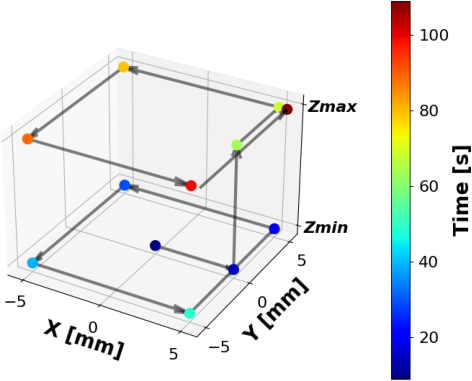
Figure 4: Planned 3D cube trajectory for sample manipulation.
Results: Position Tracking and Efficiency
Minimizing Change in Current
This strategy achieves sub-millimeter RMSE in most trials, but coil-switching events (large current changes) correlate with increased error. The closed-loop controller recovers from these events, unlike open-loop control, which often loses the sample.
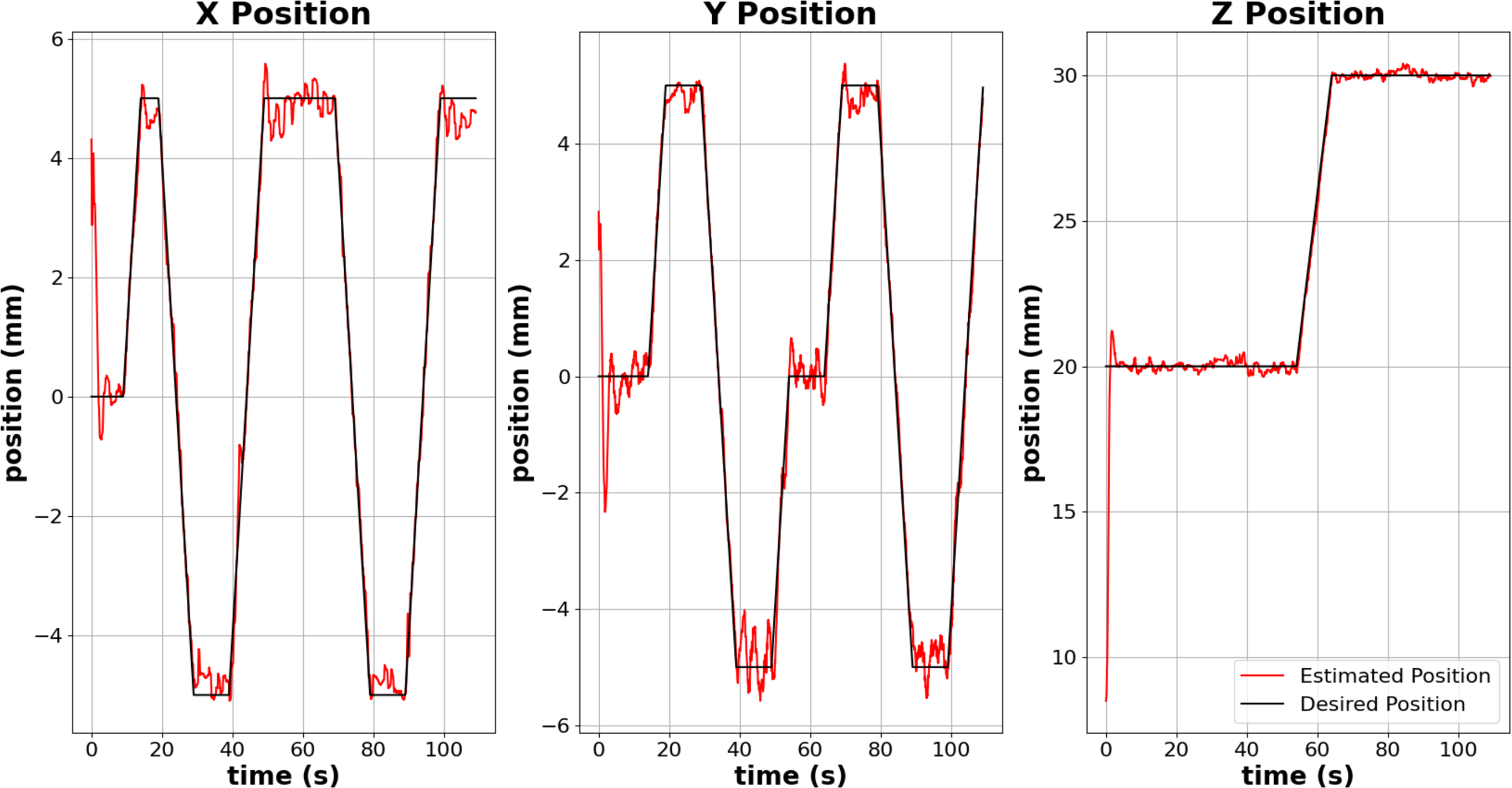
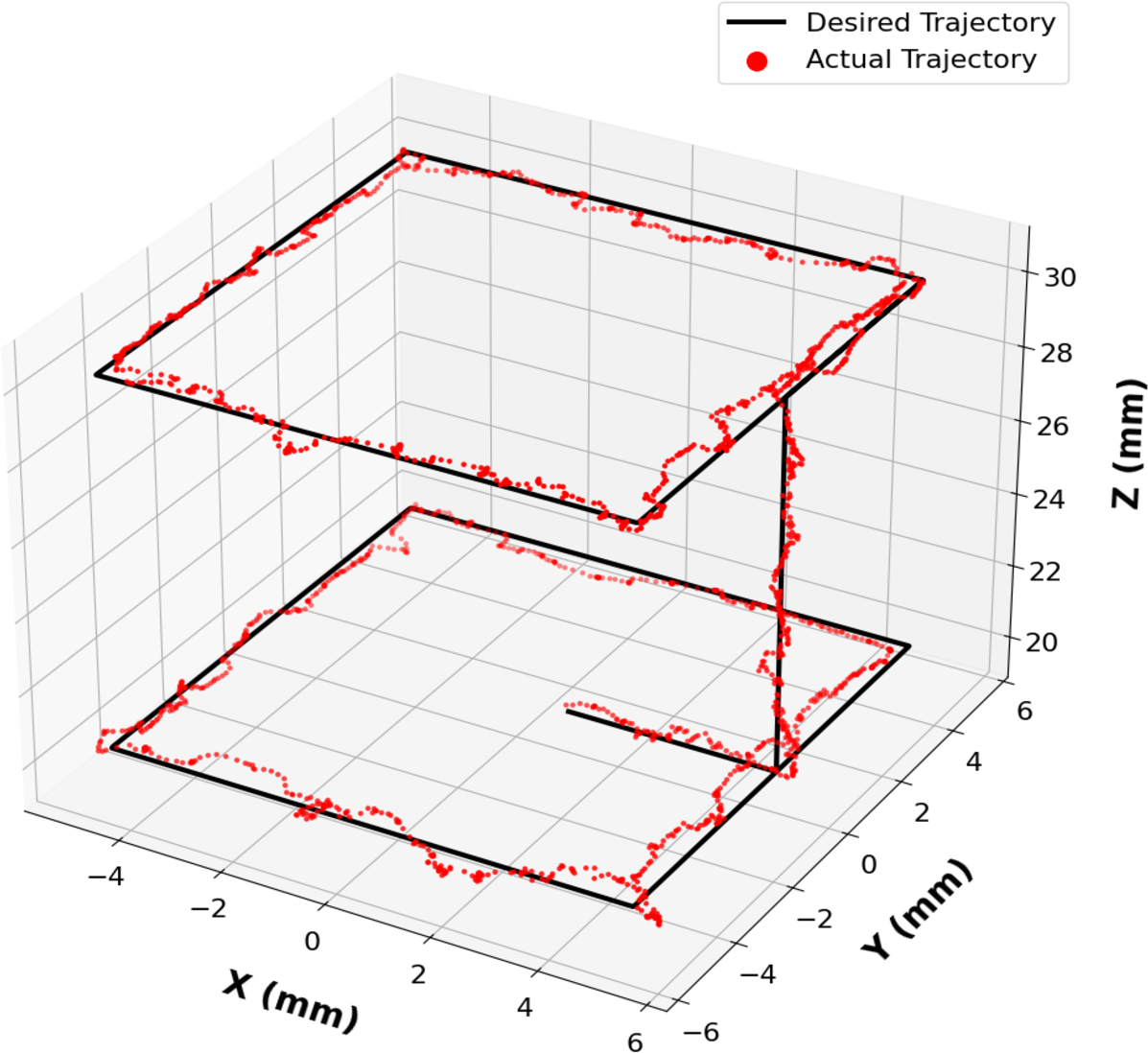
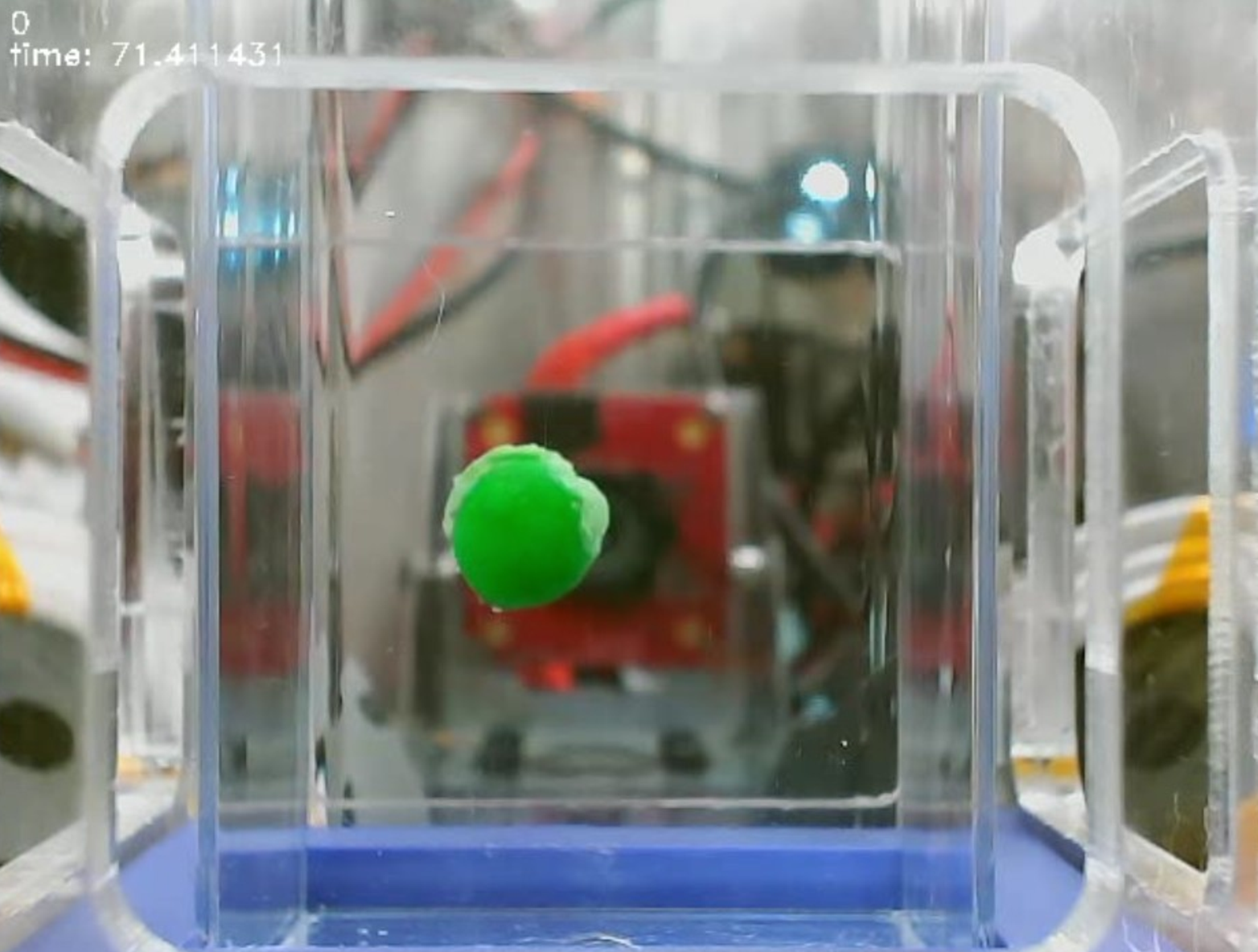
Figure 5: EKF-tracked trajectory and isometric path for a trial minimizing change in current.
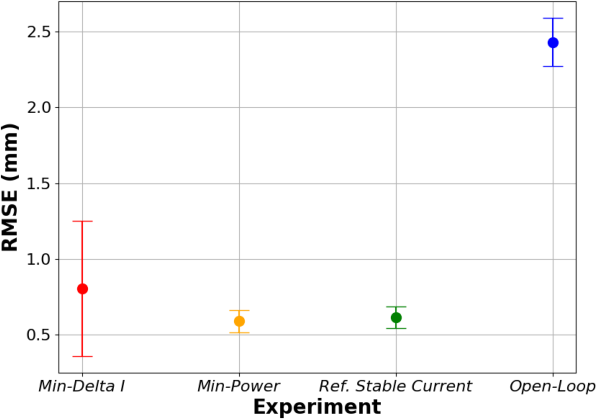
Figure 6: RMSE and standard deviation across experimental setups.
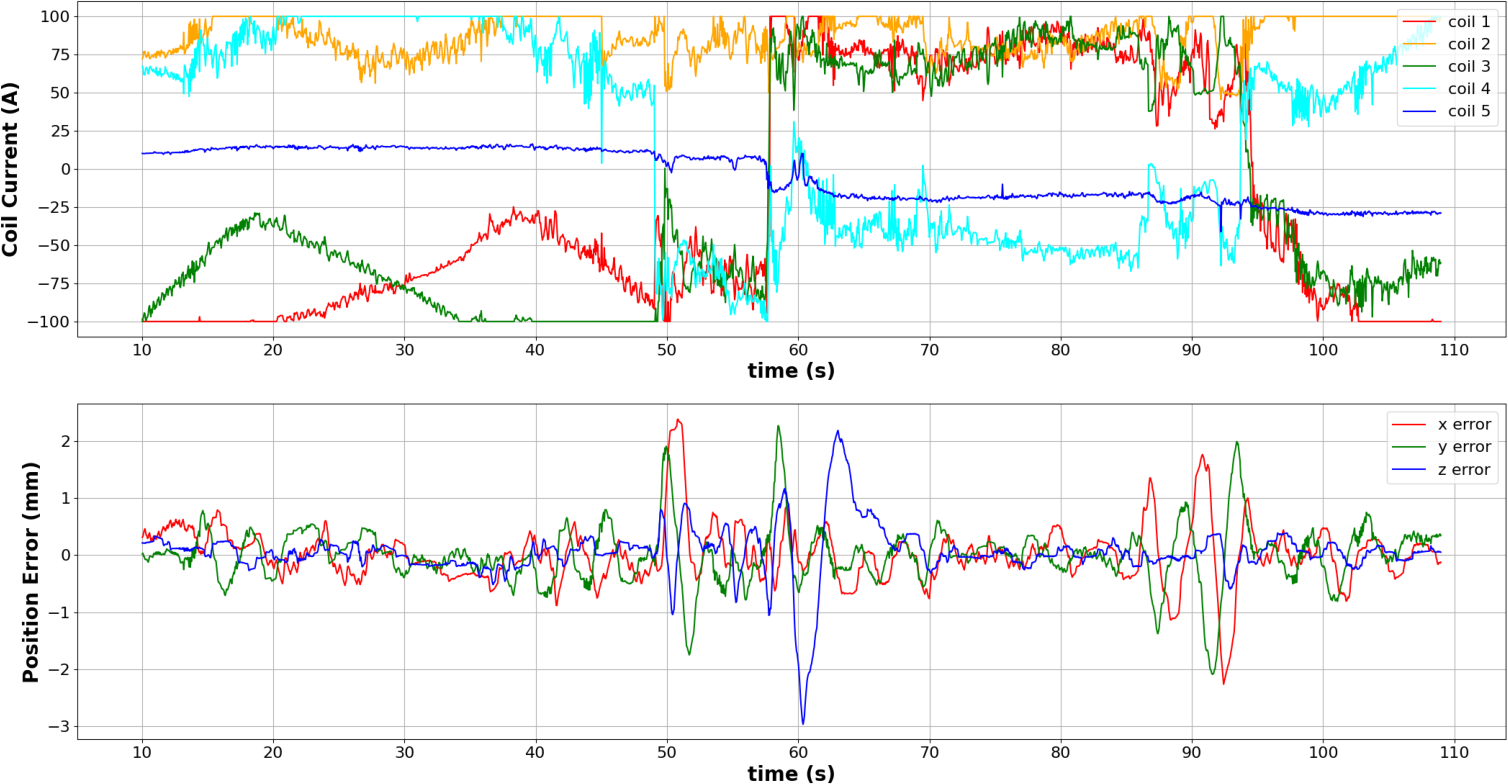
Figure 7: Coil current and position error during coil-switching events; recovery is evident post-switch.
Minimizing Overall Current
Contrary to expectations, minimizing current does not degrade positional accuracy despite more frequent coil-switches. The lower current amplitudes result in shorter transient times and improved power efficiency—an order of magnitude reduction compared to other strategies.
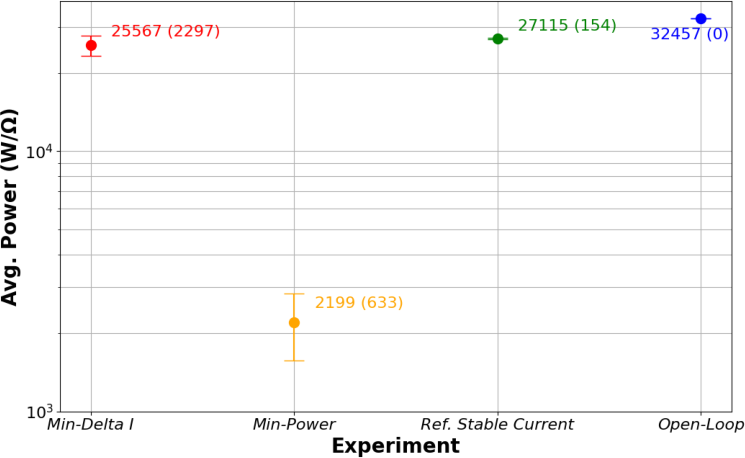
Figure 8: Normalized average power consumption for each control strategy.
Reference Current Tracking
Tracking a stable open-loop trajectory eliminates coil-switching events but does not significantly improve RMSE over the baseline. The approach may be beneficial for predictable, repetitive tasks but is less robust to calibration errors and environmental variability.
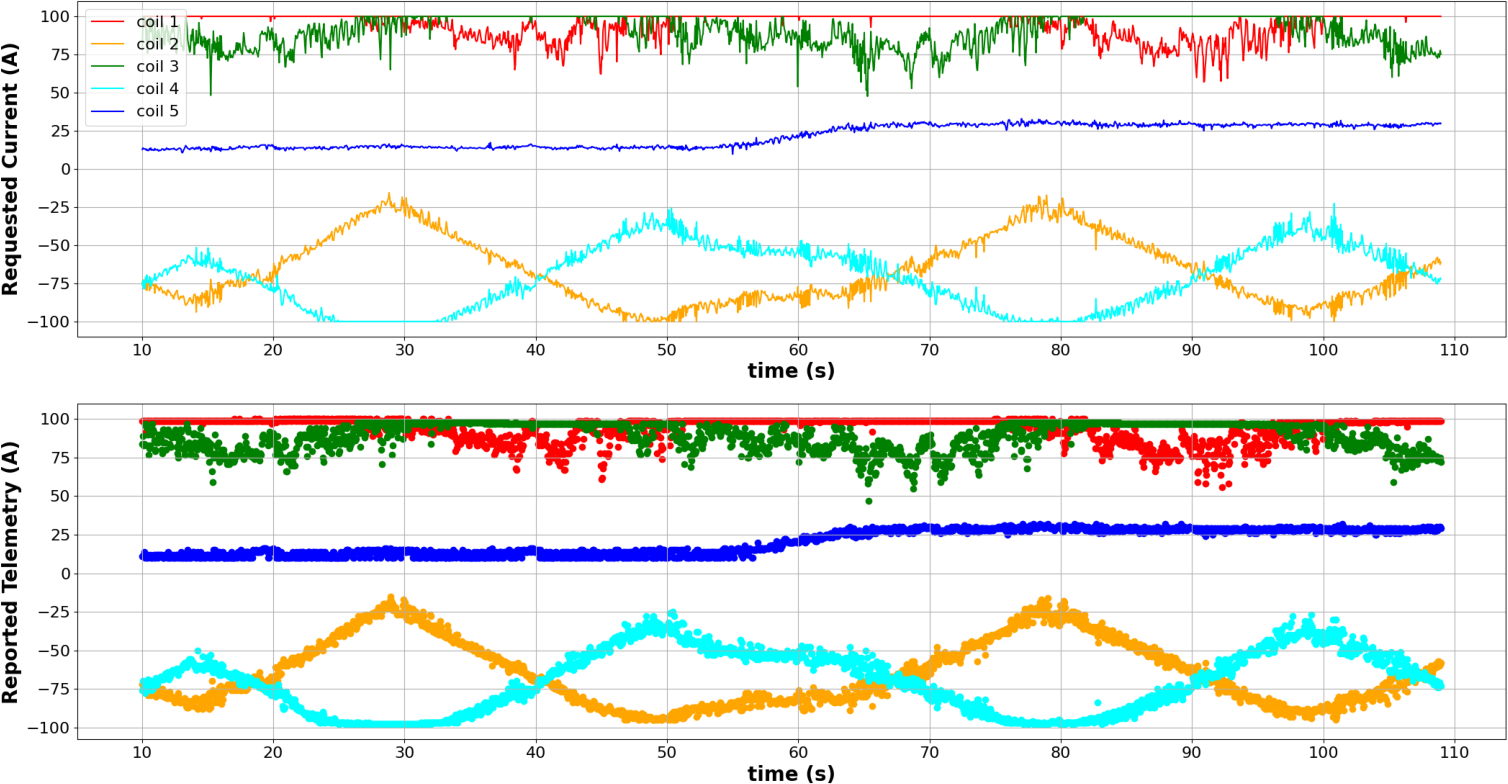
Figure 9: Reference current trajectory and actual coil currents during reference tracking; coil-switching is absent.
Open vs. Closed-Loop Comparison
Closed-loop control substantially outperforms open-loop, with RMSE reduced from 2.3 mm to 0.4 mm in representative trials. Steady-state offset and overshoot are minimized, and the system is resilient to disturbances.
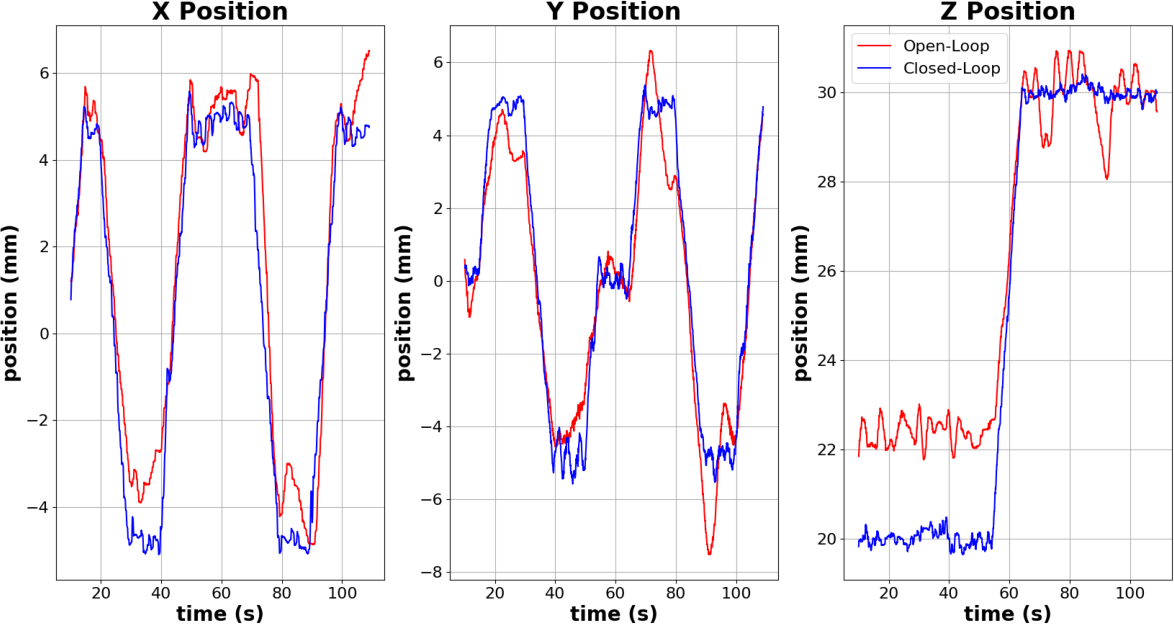
Figure 10: Open-loop (red) vs. closed-loop (blue) position tracking; closed-loop eliminates offset and overshoot.
Four-Coil vs. Five-Coil System
Surprisingly, the four-coil system achieves lower RMSE than the five-coil system, likely due to superior camera resolution and calibration. The five-coil system, however, offers greater flexibility and robustness to environmental changes.
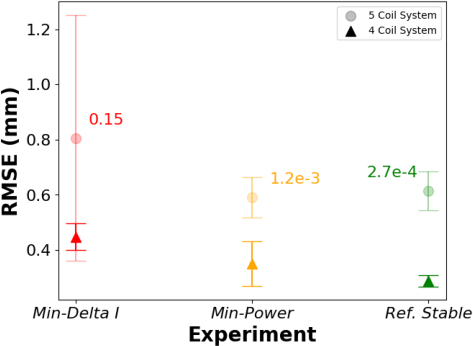
Figure 11: RMSE comparison between four-coil and five-coil systems for each control strategy; p-values indicate statistical significance.
Statistical Analysis
Two-tailed t-tests confirm that closed-loop strategies yield statistically significant improvements over open-loop control. Among closed-loop methods, no strategy is definitively superior in position tracking, though power minimization offers clear efficiency gains.
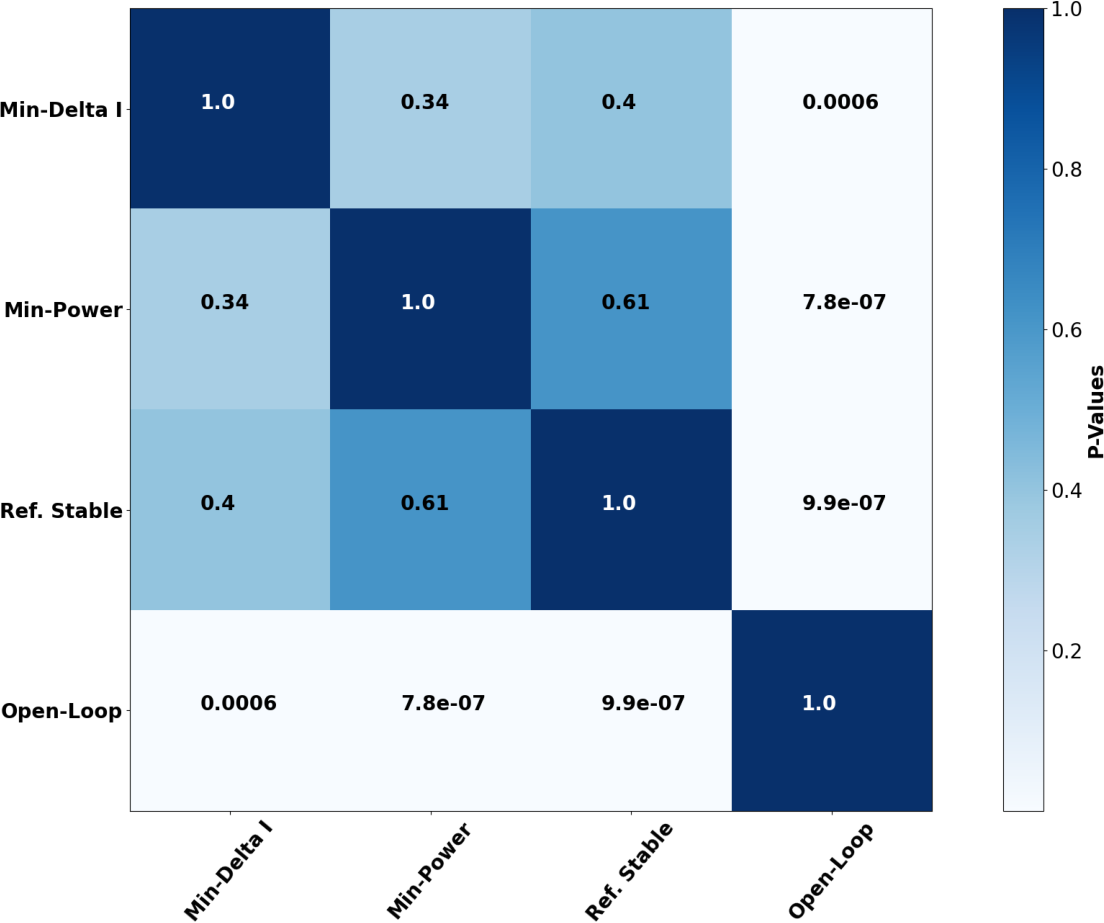
Figure 12: P-values for RMSE across control strategies; only open-loop trials reject the null hypothesis with confidence.
Implementation Considerations
- Calibration: High-fidelity field calibration is essential for accurate force computation and control.
- Camera Feedback: Object detection and triangulation accuracy directly impact state estimation and control performance.
- Solver Constraints: SQP-based inversion must respect hardware current limits and avoid destabilizing coil-switches.
- System Flexibility: Additional coils increase control authority but may introduce cross-coupling and calibration complexity.
Implications and Future Directions
The demonstrated closed-loop control of induced magnetic dipoles enables precise, non-contact manipulation of conductive materials, with direct relevance to in-orbit recycling and manufacturing. The findings suggest that power-efficient control is achievable without sacrificing accuracy, and that system design (number of coils, sensor fidelity) must be balanced for optimal performance. Future work should explore scaling to molten samples, adaptive control for variable sample properties, and integration with autonomous space-based recycling platforms.
Conclusion
This study establishes closed-loop electromagnetic manipulation as a viable method for dexterous handling of conductive, non-magnetic objects. Among evaluated control strategies, power minimization offers significant efficiency gains with no loss in positional accuracy. The system's robustness to coil-switching events and environmental disturbances marks a substantial advance over open-loop approaches. The results inform the design of future microgravity recycling systems and broader applications in non-contact material handling.