X-TRACK: Physics-Aware xLSTM for Realistic Vehicle Trajectory Prediction
Abstract: Recent advancements in Recurrent Neural Network (RNN) architectures, particularly the Extended Long Short Term Memory (xLSTM), have addressed the limitations of traditional Long Short Term Memory (LSTM) networks by introducing exponential gating and enhanced memory structures. These improvements make xLSTM suitable for time-series prediction tasks as they exhibit the ability to model long-term temporal dependencies better than LSTMs. Despite their potential, these xLSTM-based models remain largely unexplored in the context of vehicle trajectory prediction. Therefore, this paper introduces a novel xLSTM-based vehicle trajectory prediction framework, X-TRAJ, and its physics-aware variant, X-TRACK (eXtended LSTM for TRAjectory prediction Constraint by Kinematics), which explicitly integrates vehicle motion kinematics into the model learning process. By introducing physical constraints, the proposed model generates realistic and feasible trajectories. A comprehensive evaluation on the highD and NGSIM datasets demonstrates that X-TRACK outperforms state-of-the-art baselines.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper is about teaching computers to predict where cars on a highway will move next. The authors built a new system called X-TRACK that uses two ideas together:
- a smart memory-based AI model (called xLSTM) that learns patterns over time, and
- the real rules of car motion (physics), like how fast a car can speed up and how sharply it can turn.
By combining learning from data with the laws of motion, the system aims to predict future car paths that are both accurate and physically realistic.
What questions did the researchers ask?
The paper focuses on a few simple questions:
- Can a newer type of AI “memory” model (xLSTM) predict car trajectories better than older models?
- If we add real-world physics rules to the AI, will the predicted paths become smoother and more realistic?
- How well does this approach work on real highway data from Germany (highD) and the US (NGSIM)?
How did they approach the problem?
To understand the method, imagine driving on a highway:
- Your car’s future position depends on its past movement.
- It also depends on how nearby cars move and interact with you.
- And it must follow physics — a car can’t teleport, make instant U-turns, or accelerate without limits.
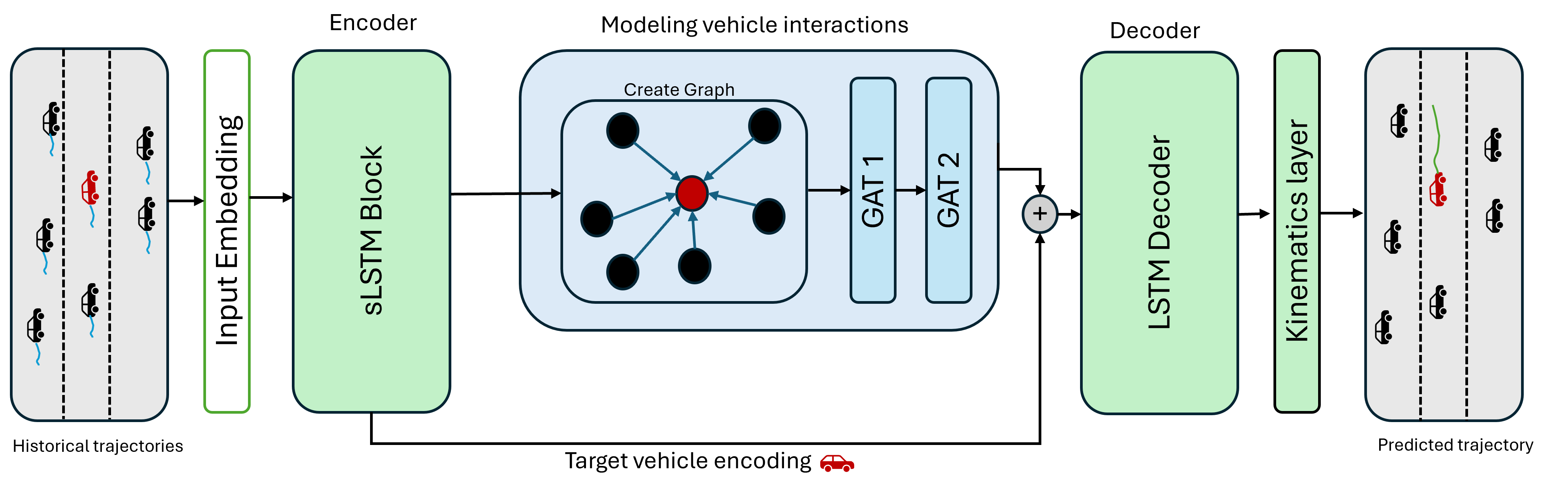
The authors build a model that follows these ideas in three main steps.
1) Learning from past motion with xLSTM
- Think of xLSTM as a “long-term memory” for time-based data.
- Regular LSTMs are like notebooks with a single page — helpful but limited.
- xLSTM is like a better-organized binder: it can remember important things for longer and update decisions more flexibly.
- The model reads the past positions, speeds, and accelerations of the target car and nearby cars to understand how they’ve been moving.
2) Paying attention to nearby cars (social interactions)
- Cars influence each other: a car ahead slowing down can make you slow down; a car beside you might prevent a lane change.
- The model uses a “Graph Attention Network” (GAT), which you can think of as a way to focus on the most important neighbors at each moment.
- It builds a simple “social map” of the cars around you and learns which ones matter most for your next move.
3) Adding physics (a kinematic layer)
- Instead of predicting future positions directly, the physics-aware version (X-TRACK) predicts motion parameters:
- Longitudinal acceleration (): how much the car speeds up or slows down.
- Yaw rate (): how fast the car’s heading angle changes (how quickly it turns).
- Then, using basic motion equations, it converts these into positions over time.
- The model also enforces physical limits (for example, there’s a maximum safe acceleration and turning rate), which prevents unrealistic paths.
Data and evaluation
- Datasets:
- highD: highway videos from drones in Germany (smooth, well-labeled).
- NGSIM: US highway data (more varied but sometimes messy).
- The authors balance the data so there are fair amounts of lane-keeping and lane-changing scenes.
- Metrics (simple idea: “how far off was the prediction?”):
- ADE: average error over the whole future path.
- FDE: error at the final predicted position.
- RMSE over time: error at each second in the 5-second future window.
What did they find?
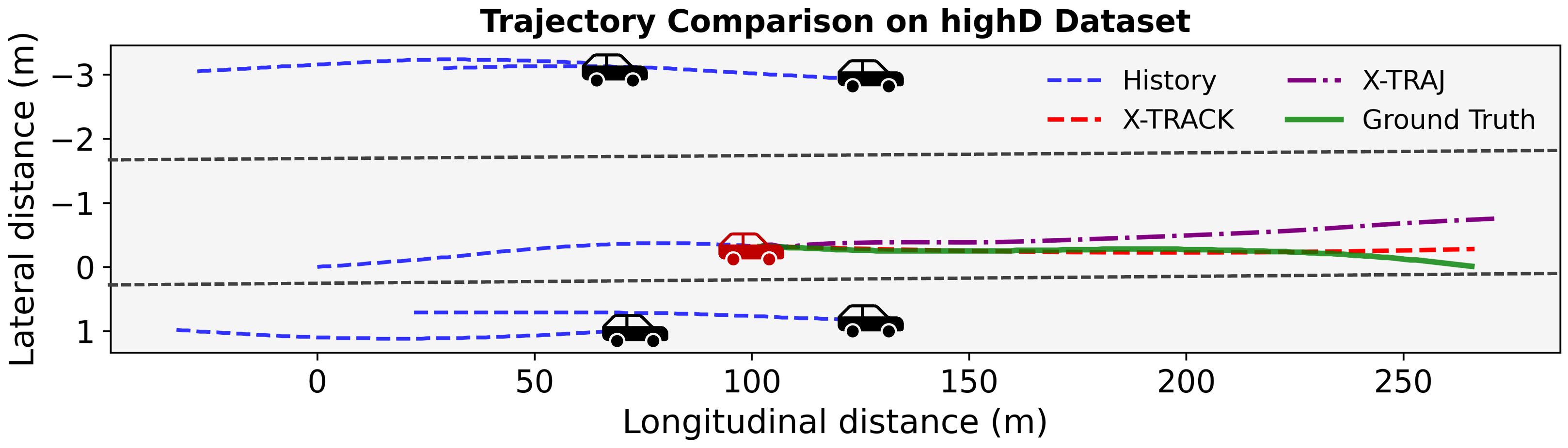
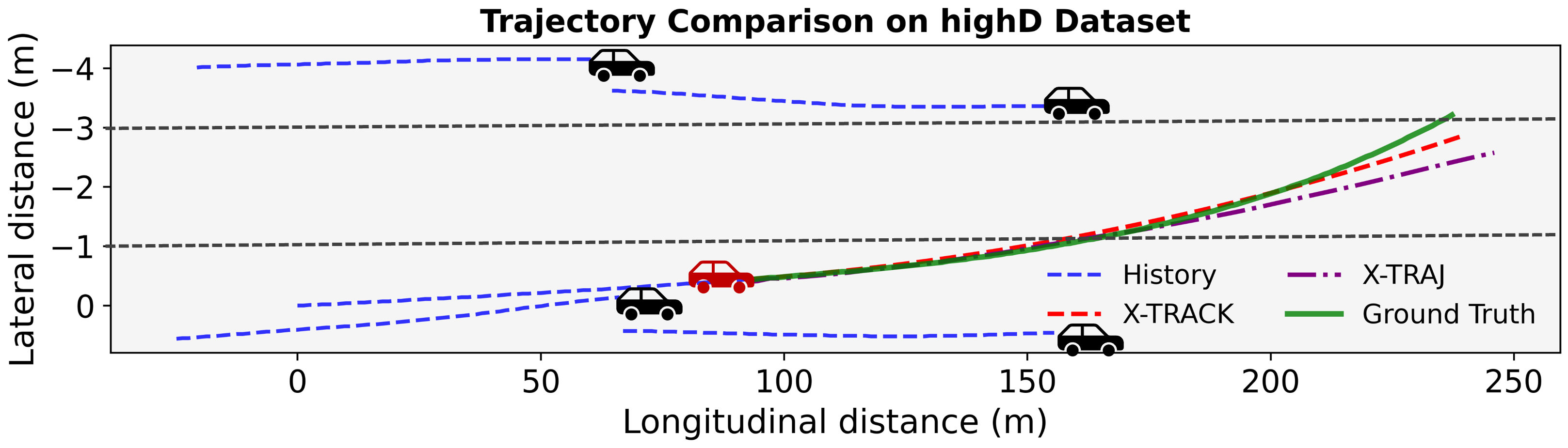
- On the highD dataset (Germany), X-TRACK was the best:
- Big improvements over both older models and their own non-physics version (X-TRAJ).
- X-TRACK reduced errors by up to about 79% at 1 second ahead and about 32% at 5 seconds ahead compared to their non-physics version.
- Compared to a strong baseline, X-TRACK was best on most metrics.
- On the NGSIM dataset (US), results were more mixed:
- X-TRAJ (without physics) slightly beat X-TRACK on some overall metrics.
- Reasons include fewer balanced scenarios and some label inaccuracies in NGSIM, which can confuse learning.
- Even so, X-TRACK was still among the top models and did well at early prediction times.
- They also tested different combinations of encoder/decoder types and found:
- Using an sLSTM encoder (a type of xLSTM) plus a standard LSTM decoder worked best overall within their physics-aware setup.
Why these results matter:
- Adding physics makes the predictions more realistic and safer (fewer impossible sharp turns or sudden jumps).
- xLSTM helps the model remember longer-term patterns better than older LSTMs.
Why it matters and what’s next
Accurate and realistic trajectory prediction is crucial for self-driving cars. If a car can better predict what surrounding vehicles will do in the next few seconds, it can plan safer lane changes, braking, and merging.
This paper shows that:
- Blending smart AI memory (xLSTM) with real-world motion rules (physics) can improve both accuracy and realism.
- Such hybrid models can reduce risky or impossible predictions, which is important for safety.
Looking ahead, the authors suggest:
- Adding road and map details (like lane shapes, ramps, and signs) to make predictions even better.
- Testing in more complex city environments, where interactions are richer and more challenging.
In short, X-TRACK moves us closer to self-driving systems that are not only smart but also grounded in how cars truly move.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a consolidated list of what remains missing, uncertain, or unexplored in the paper, formulated to guide future research:
- Generalization beyond highways: The models are only evaluated on highway datasets (highD, NGSIM); performance and design suitability for urban, intersection-rich, and mixed traffic environments remain unknown.
- Scenario-wise performance: No breakdown of results by maneuver type (e.g., keep lane, lane change, merge, cut-in), making it unclear where the approach excels or struggles.
- Multi-modality and uncertainty: The prediction is deterministic; there is no handling of inherently multi-modal futures or quantification of uncertainty, which is critical for maneuvers with multiple plausible outcomes.
- Map and road-context integration: The models do not use lane geometry, curvature, speed limits, ramps, or HD maps; the impact of explicit map priors on prediction accuracy and feasibility is not assessed.
- Fixed neighborhood design: A static set of N=8 neighbors (plus “ghost vehicles” in sparse scenarios) is assumed; the effect of dynamic, variable-sized neighborhoods and long-range influences is unexplored.
- Ghost vehicles: Insertion of “ghost vehicles” with target-like motion features is not validated via ablation; their impact on interaction modeling fidelity and metric scores is unknown.
- Interaction graph structure: Only directed edges from neighbors to the target are modeled; the effect of modeling full mutual interactions (neighbor-neighbor edges, road-space nodes, dynamic edge features) is not studied.
- Edge/node features: Interaction modeling relies solely on node hidden states without explicit edge features (e.g., relative distance, time-to-collision); the value of richer relational features is untested.
- xLSTM design choices: The encoder uses a single-layer sLSTM with limited exploration of depth, number of heads, normalization choices, and gating variants; the reasons mLSTM underperforms as a decoder are not analyzed.
- Decoder architecture: The best-performing setup uses an LSTM decoder; it remains unclear whether an xLSTM decoder (or transformer-based decoder) could improve long-horizon stability and multi-modality.
- Loss functions and training details: The paper does not specify the loss used for X-TRACK (parameter-space vs. trajectory-space), regularization (e.g., jerk/lateral acceleration penalties), learning rate schedules, or early stopping criteria.
- Numerical derivatives for ground truth: Ground-truth yaw rate and acceleration are obtained via numerical differentiation from positions; robustness to noise, annotation errors (noted for NGSIM), and derivative instability is not addressed (no filtering/smoothing described).
- Time-step handling: With different sampling rates (highD at 25 Hz, NGSIM at 10 Hz), the choice of and any resampling/interpolation procedures for consistent kinematic integration are not documented.
- Constraint enforcement method: Physical bounds on and are stated, but the enforcement mechanism (e.g., hard clipping, soft penalties, differentiable constraints) and training-time effects are not described.
- Speed-dependent constraints: The yaw-rate bound is static; speed-dependent lateral acceleration limits (friction circle), vehicle-specific constraints (wheelbase, mass), and road-condition dependencies (wet/icy roads) are not incorporated.
- Vehicle heterogeneity: Differences among vehicle classes (cars, trucks, buses) and their distinct dynamics (e.g., lower max acceleration/yaw rates) are not modeled or evaluated.
- Collision/safety metrics: Evaluation omits safety-oriented measures (collision rate, minimum distance to neighbors, violation of comfort bounds like jerk, lane-boundary crossings), limiting assessment of social compliance and feasibility.
- Long-horizon robustness: Results focus on a 5-second horizon; stability, drift, and compounding error over longer horizons (e.g., 10–20 s) are not investigated.
- Real-time performance: No reporting on inference latency, throughput, model size, and hardware requirements; suitability for onboard deployment in real-time autonomous systems is unknown.
- Robustness to missing or noisy inputs: The approach is not tested under sensor noise, occlusions, missing neighbor data, GPS errors, or domain shifts (e.g., different regions, weather conditions).
- Training data splits and leakage: The paper does not clarify whether train/val/test splits are stratified by recording/site to prevent leakage; cross-recording contamination could inflate performance.
- Statistical significance: While NGSIM results are described as “less statistically significant,” no confidence intervals, variance across seeds, or hypothesis testing are presented.
- Impact of dataset balancing: The heavy downsampling of NGSIM to balance scenario types is not accompanied by sensitivity analysis; how balancing choices affect model generalization remains unclear.
- Ablations on GAT design: The number of layers/heads, attention mechanisms, and alternative graph formulations (e.g., distance-weighted edges, spatio-temporal edges) are not ablated.
- Initial condition handling: The derivation and robustness of initial heading angle and speed at the transition from observation to prediction are not specified (e.g., unwrapping, smoothing).
- Evaluation protocol comparability: Baseline implementations adapted to the authors’ preprocessing may deviate from original protocols; the fairness and reproducibility of comparisons are uncertain (no code available at submission).
- Interpretability: There is no analysis or visualization of the learned attention patterns or xLSTM memory dynamics to understand how social interactions and physics priors influence predictions.
- Transfer learning/domain adaptation: No methods are explored to bridge the domain gap between highD and NGSIM (e.g., domain adaptation, fine-tuning strategies), despite the noted dataset differences.
- Failure case analysis: The paper lacks qualitative/quantitative analyses of typical failure modes (e.g., abrupt cut-ins, dense traffic, curved ramps), making it hard to target improvements.
- Constraint violation auditing: Although physical bounds are imposed, there is no reporting on residual violations (e.g., lateral acceleration exceeding limits, unrealistic curvature) or how often kinematic constraints are breached before/after integration.
- Hyperparameter sensitivity: The model’s sensitivity to key hyperparameters (embedding size, hidden dimensions, GAT head count, neighbor count N) is not assessed, limiting reproducibility and robustness tuning.
Glossary
- Adam: An adaptive stochastic optimization algorithm commonly used to train neural networks by adjusting learning rates based on first and second moment estimates of gradients. "optimization is carried out with the Adam \cite{adam} algorithm."
- Average Displacement Error (ADE): A trajectory prediction metric that measures the mean Euclidean distance between predicted and ground-truth positions across the whole horizon. "Average Displacement Error (ADE): The mean Euclidean distance between the predicted and ground truth trajectories averaged across all time steps and all trajectories."
- Convolutional social pooling: A social interaction modeling technique that aggregates neighboring agents’ features via convolutional connections. "a social pooling layer using convolutional connections, namely convolutional social pooling, is used to model vehicle interactions."
- Covariance update rule: An update mechanism in matrix-memory recurrent units that leverages covariance-like statistics to refine memory states. "mLSTM has matrix memory and a covariance update rule."
- Encoder-decoder: A sequence modeling architecture where an encoder processes input sequences into representations and a decoder generates future sequences from them. "an LSTM-based encoder-decoder model where a social pooling layer using convolutional connections, namely convolutional social pooling, is used to model vehicle interactions."
- Exponential gating: A gating strategy in recurrent units that uses exponential activation to improve memory dynamics and enable storage revision. "Exponential gating combined with normalization and stabilization is used to provide sLSTM the ability to revise storage decisions."
- Final Displacement Error (FDE): A trajectory prediction metric measuring the Euclidean distance between predicted and ground-truth final positions. "Final Displacement Error (FDE): The Euclidean distance between the predicted and ground truth final positions for each trajectory, averaged over all trajectories."
- Gated Recurrent Units (GRUs): Recurrent neural network cells that capture temporal dependencies using update and reset gates as a lighter alternative to LSTMs. "Gated Recurrent Units (GRUs) have been widely adopted."
- Ghost vehicles: Placeholder agents added to scenarios with insufficient context to maintain consistent input structure during training. "ghost vehicles are inserted while training X-TRAJ."
- Graph Attention Networks (GATs): Graph neural layers that compute attention weights over neighbors to aggregate relational information. "Mo et al. \cite{two_channel} employ Graph Attention Networks (GATs) \cite{gat} to model the neighboring vehicle interactions."
- Graph Fourier Transform (GFT): A transform that maps graph signals to the spectral domain using the eigenbasis of a graph Laplacian. "Vehicle interaction is transformed using Graph Fourier Transform (GFT) into a spectral scenario representation."
- Graph Neural Networks (GNNs): Neural models that operate on graph-structured data to learn from nodes, edges, and their relationships. "Graph Neural Networks (GNNs) have gained traction to create a scene graph and represent the neighboring participants as nodes."
- Hierarchical Spatio-Temporal Attention (HSTA): An attention mechanism that hierarchically models spatial and temporal dependencies for interaction-aware prediction. "Wu et al. \cite{hsta} introduced Hierarchical Spatio-Temporal Attention (HSTA) for modeling spatio-temporal interactions and trajectory prediction using GATs, MHAs, along with LSTMs."
- Kinematic bicycle model: A simplified vehicle dynamics model capturing non-holonomic motion using a two-wheel abstraction for physically feasible trajectory generation. "a kinematic bicycle model was introduced where the predictions of a deep learning model are refined through a kinematic layer"
- Kinematic layer: A physics-based module that constrains or transforms predicted motion parameters to ensure consistency with vehicle dynamics. "The Kinematic layer then transforms these motion parameters into position coordinates to provide the future trajectory of the target vehicle."
- LeakyReLU: An activation function that allows a small, non-zero gradient for negative inputs to mitigate dead neurons. "The LeakyReLU activation function with a negative slope of $0.1$ is used."
- Longitudinal acceleration: The acceleration component along the vehicle’s forward direction, often denoted . "representing the vehicle's kinematic state using longitudinal acceleration () and yaw rate ()."
- mLSTM: An xLSTM variant with matrix-valued memory and a covariance-based update rule for richer temporal representation. "The extended family of LSTM now consists of sLSTM and mLSTM, where sLSTM has a scalar memory, a scalar update, and memory mixing, and mLSTM has matrix memory and a covariance update rule."
- Multi-Head Attention (MHA): An attention mechanism with multiple parallel heads capturing diverse relational patterns. "introduced a Multi-Head Attention (MHA) mechanism \cite{mha_lstm} to model distant traffic participants."
- Non-holonomic constraints: Motion constraints reflecting that vehicles cannot move sideways and have limited instantaneous orientation changes. "non-holonomic constraints of the vehicle to predict reliable future motion."
- Non-holonomic dynamics: Vehicle dynamics governed by constraints that limit allowable motions, ensuring physically realistic behavior. "such as non-holonomic dynamics, to generate predictions consistent with real-world behavior."
- Normalizer state: An auxiliary state in sLSTM used to normalize cell output and stabilize memory dynamics. "where represent the cell state, normalizer state, and hidden state, respectively"
- Repulsion and Attraction Graph Attention (RA-GAT): A graph attention approach that models repulsive and attractive forces among vehicles in traffic. "The authors of Repulsion and Attraction Graph Attention (RA-GAT) \cite{ra_gat} also use GATs to model the repulsive and attractive forces within a traffic scenario."
- Root Mean Square Error (RMSE): A metric quantifying average error magnitude as the square root of mean squared differences between predictions and ground truth. "Root Mean Square Error (RMSE) at time t: The square root of the average of the squared differences between the predicted and corresponding ground truth positions for all trajectories."
- Scene graph: A graph representation of a scene where entities are nodes and their relations are edges. "create a scene graph and represent the neighboring participants as nodes."
- sLSTM: An xLSTM variant with scalar memory and exponential gates that enable memory mixing and storage revision. "sLSTM has a scalar memory, a scalar update, and memory mixing"
- State-gated fusion layer: A fusion component that integrates spatial and temporal features using gating conditioned on state information. "followed by a state-gated fusion layer to integrate both spatial and temporal dependencies."
- Stationary frame of reference: A coordinate system fixed at a point used to express positions relative to a static origin. "The position coordinates of all the vehicles are represented in a stationary frame of reference with the origin fixed at the target vehicle's position at time ."
- xLSTM: Extended Long Short-Term Memory architecture with improved memory dynamics (e.g., exponential gating) enabling better long-range dependency modeling. "Beck et al. \cite{xLSTM} introduced Extended Long Short Term Memory (xLSTM), an enhanced variant with improved memory dynamics, representational capacity, and computational efficiency."
- X-TRACK: A physics-aware xLSTM-based trajectory prediction model constrained by vehicle kinematics. "X-TRACK (eXtended LSTM for TRAjectory prediction Constraint by Kinematics), which explicitly integrates vehicle motion kinematics into the model learning process."
- X-TRAJ: An xLSTM-based vehicle trajectory prediction framework without the physics-based kinematic layer. "a novel xLSTM-based vehicle trajectory prediction framework, X-TRAJ."
- Yaw rate: The rate of change of a vehicle’s heading angle around its vertical axis, denoted . "This module aims to predict the motion parameters, yaw rate and longitudinal acceleration of the vehicle instead of directly predicting the position coordinates"
Practical Applications
Practical Applications of X-TRAJ and X-TRACK
Below are actionable, real-world applications that derive from the paper’s physics-aware xLSTM trajectory prediction framework (X-TRACK) and its non-kinematic variant (X-TRAJ). Applications are grouped into immediate (deployable now) and long-term (requiring further research, scaling, or development), with sector links, potential tools/products/workflows, and assumptions/dependencies noted for each.
Immediate Applications
These use cases can be piloted or deployed with current capabilities, especially in highway environments similar to those represented by highD.
- Automotive (OEMs/Tier-1s): Highway prediction module for ADAS and autonomous driving stacks
- Use X-TRACK as the prediction component in the autonomy pipeline (perception → tracking → prediction → planning → control), providing physically consistent future trajectories over 1–5 seconds.
- Tools/products/workflows: ROS2 node or microservice for prediction; integration with planning to filter implausible trajectories; per-vehicle calibration of physical limits (e.g., and ).
- Sector: Automotive, Robotics (autonomous vehicles).
- Assumptions/Dependencies: Reliable multi-object tracking of up to 8 nearest vehicles; accurate ego and neighbor states (position, velocity, yaw rate/heading); highway domain; real-time inference budget on edge compute; vehicle-specific dynamics bounds.
- ADAS features: Cut-in, merge, and emergency braking anticipation on highways
- Improve early warning and decision-making in features like adaptive cruise control, lane keeping assist, and lane change assist, reducing false alarms caused by statistically plausible but physically infeasible predictions.
- Tools/products/workflows: Hazard scoring module using predicted trajectories; planner “guardrails” that reject non-kinematic predictions; scenario-based thresholds for TTC and conflict risk.
- Sector: Automotive, Software.
- Assumptions/Dependencies: Consistent lane-level localization; robust detection in diverse weather/lighting; calibrated thresholds for different vehicle classes and tire-road conditions.
- Simulation and testing: Realistic traffic agents in AV simulators
- Use X-TRACK to generate physics-consistent agent behaviors in simulators such as CARLA, SUMO, and LGSVL for training and validation, improving fidelity of lane changes and merges.
- Tools/products/workflows: Simulator plugin; scenario generation toolkit; dataset augmentation with physically constrained predictions.
- Sector: Software, Robotics (testing/validation).
- Assumptions/Dependencies: Domain adaptation to simulator kinematics and coordinate frames; proper scaling of time-steps and noise characteristics; access to representative scenario distributions.
- Safety analytics: Surrogate safety metrics from physically consistent predictions
- Compute TTC, PET, and conflict probabilities using predicted trajectories that respect vehicle dynamics to avoid artifacts (e.g., unrealistically sharp turns).
- Tools/products/workflows: Safety analytics pipeline; post-hoc evaluation for AV/ADAS trials; comparison against baselines (ADE/FDE/RMSE).
- Sector: Automotive, Policy, Smart Mobility.
- Assumptions/Dependencies: High-quality trajectory logs; balanced scenario sampling; annotation accuracy similar to highD; consistent coordinate conventions.
- Traffic operations pilot: Ramp metering and lane closure decision support (micro-horizon)
- Short-term forecasts of vehicle interactions around ramps and bottlenecks for control room operators, focusing on conflict detection and risk hotspots.
- Tools/products/workflows: Edge inference at roadside units (RSUs); dashboard visualization of predicted conflicts; limited corridor deployments.
- Sector: Smart Cities, Transportation Management.
- Assumptions/Dependencies: Sufficient sensor coverage (cameras, radars); data privacy and security compliance; reliable tracking under occlusions; real-time compute at the edge.
- Academic and benchmarking use
- Use X-TRAJ and X-TRACK as reproducible baselines for physics-aware prediction on highway datasets; ablation studies of sLSTM vs mLSTM encoders; extensions to graph-based interaction modeling.
- Tools/products/workflows: PyTorch/PyG codebase; standardized evaluation (ADE, FDE, RMSE); public benchmark participation.
- Sector: Academia, Software.
- Assumptions/Dependencies: Availability of code as stated; access to highD/NGSIM; consistent preprocessing (balanced scenarios).
- Forensic trajectory reconstruction (post-event analysis)
- Apply X-TRACK offline to reconstruct plausible vehicle trajectories from partial logs or video, aiding claim analysis and incident reconstruction.
- Tools/products/workflows: Batch inference tool; video-to-trajectory pipeline; uncertainty bounds on reconstructions.
- Sector: Insurance, Legal/Forensics.
- Assumptions/Dependencies: Availability of sufficiently accurate detections; synchronization of data sources; careful handling of dataset biases (e.g., NGSIM annotation quirks).
Long-Term Applications
These use cases require extensions beyond highway scenarios, larger datasets, additional modalities, or regulatory maturation.
- Urban driving trajectory prediction across heterogeneous agents
- Extend X-TRACK to intersections, roundabouts, pedestrians, cyclists, and buses; incorporate map semantics (lanes, turn rules, crosswalks) and multimodal intent.
- Tools/products/workflows: “X-TRACK-Urban” with HD map interfaces; multi-class prediction heads; multi-modal trajectory sampling; integration with intent estimation.
- Sector: Automotive, Robotics (AVs), Smart Cities.
- Assumptions/Dependencies: Rich, well-annotated urban datasets; accurate map alignment; robust perception under occlusion; expanded kinematic models beyond bicycle dynamics.
- V2X-enabled cooperative prediction and collision avoidance
- Fuse vehicle-broadcast states (V2V/V2I) with X-TRACK to predict joint maneuvers and alert nearby participants or infrastructure for proactive safety actions.
- Tools/products/workflows: RSU inference clusters; cooperative awareness messages feeding prediction; broadcast early warnings for impending conflicts.
- Sector: Smart Mobility, Telecommunications.
- Assumptions/Dependencies: V2X penetration, latency guarantees, standardized message formats; privacy and cybersecurity controls; interoperable data fusion.
- Energy and eco-driving optimization
- Use physically consistent predictions to smooth acceleration profiles for EVs and hybrids, reducing energy consumption and improving battery health.
- Tools/products/workflows: Eco-planning module tied to X-TRACK; cost functions that penalize high and frequent yaw rate changes; driver coaching or autopilot tuning.
- Sector: Energy, Automotive (EVs).
- Assumptions/Dependencies: Reliable long-horizon predictions; integration with route and traffic forecasts; calibration to vehicle mass, powertrain, and tire-road friction.
- Fleet operations and platooning stability
- Enhance truck platooning and convoy management with robust trajectory prediction for maintaining safe headways and coordinated lane changes.
- Tools/products/workflows: Fleet-level prediction services; convoy controller augmentation; inter-vehicle coordination schemes.
- Sector: Logistics, Automotive (Commercial Vehicles).
- Assumptions/Dependencies: Consistent inter-vehicle sensing; standardized vehicle dynamics limits; regulatory clearance for platooning strategies.
- Policy and standards: Physically consistent prediction requirements
- Inform test protocols and regulatory standards to require physics-aware trajectory prediction in AV/ADAS safety cases, reducing risk from unrealistic models.
- Tools/products/workflows: Certification test suites; compliance metrics combining accuracy (ADE/FDE) and feasibility checks (kinematic bounds).
- Sector: Policy/Regulation, Standardization.
- Assumptions/Dependencies: Consensus across regulators and industry; availability of open benchmarks; repeatable test procedures.
- Insurance telematics and real-time risk scoring
- Use on-board or smartphone sensors to estimate and yaw rate, feeding prediction models for near-miss detection and dynamic risk pricing.
- Tools/products/workflows: Telematics SDK integrating X-TRACK-like models; privacy-preserving risk computation; dashboards for drivers/fleet managers.
- Sector: Finance (Insurance), Mobility.
- Assumptions/Dependencies: Sensor quality on consumer devices; robust calibration; data privacy compliance; coverage across varied driving contexts.
- Hardware acceleration and edge deployment at scale
- Optimize xLSTM (sLSTM/mLSTM) and GAT for dedicated accelerators or microcontrollers to meet strict latency and power budgets in mass-market vehicles.
- Tools/products/workflows: Model compression/pruning; kernel-level acceleration; on-chip graph attention implementations.
- Sector: Semiconductor, Automotive.
- Assumptions/Dependencies: Sustained industry investment in edge AI; standardized toolchains; rigor in real-time performance testing.
- Digital twins and corridor-level traffic forecasting
- Combine micro-level predictions with macroscale traffic models for proactive lane management, incident mitigation, and infrastructure planning.
- Tools/products/workflows: Digital twin platforms ingesting micro-predictions; anomaly detection and intervention simulation; long-horizon planning.
- Sector: Smart Cities, Transportation Planning.
- Assumptions/Dependencies: Broad sensor infrastructure; scalable data pipelines; robust data governance and interoperability.
Cross-cutting Assumptions and Dependencies
- Domain and data quality: High performance is demonstrated on well-annotated highway data (highD); results on NGSIM highlight sensitivity to annotation accuracy and scenario imbalance. Balanced scenario distributions are critical to avoid bias toward lane keeping.
- Sensor fidelity and perception: Real-world deployment relies on accurate, timely perception (position, velocity, yaw/heading) and consistent coordinate frames; occlusions and adverse conditions can degrade performance.
- Model scope: Current design targets highway settings with up to N=8 neighbors; urban expansion requires richer semantics and multi-agent modeling.
- Physical constraints and calibration: Vehicle-specific dynamics (mass, tire, actuator limits) vary; kinematic bounds must be calibrated per platform and environmental conditions.
- Computational constraints: Real-time inference requires efficient implementations; xLSTM+GAT stacks should be profiled and optimized for embedded hardware.
- Safety, compliance, and explainability: Physics-aware constraints improve plausibility, but formal verification, audit trails, and compliance with emerging AV standards remain necessary.
Collections
Sign up for free to add this paper to one or more collections.