Visual Backdoor Attacks on MLLM Embodied Decision Making via Contrastive Trigger Learning
Abstract: Multimodal LLMs (MLLMs) have advanced embodied agents by enabling direct perception, reasoning, and planning task-oriented actions from visual inputs. However, such vision driven embodied agents open a new attack surface: visual backdoor attacks, where the agent behaves normally until a visual trigger appears in the scene, then persistently executes an attacker-specified multi-step policy. We introduce BEAT, the first framework to inject such visual backdoors into MLLM-based embodied agents using objects in the environments as triggers. Unlike textual triggers, object triggers exhibit wide variation across viewpoints and lighting, making them difficult to implant reliably. BEAT addresses this challenge by (1) constructing a training set that spans diverse scenes, tasks, and trigger placements to expose agents to trigger variability, and (2) introducing a two-stage training scheme that first applies supervised fine-tuning (SFT) and then our novel Contrastive Trigger Learning (CTL). CTL formulates trigger discrimination as preference learning between trigger-present and trigger-free inputs, explicitly sharpening the decision boundaries to ensure precise backdoor activation. Across various embodied agent benchmarks and MLLMs, BEAT achieves attack success rates up to 80%, while maintaining strong benign task performance, and generalizes reliably to out-of-distribution trigger placements. Notably, compared to naive SFT, CTL boosts backdoor activation accuracy up to 39% under limited backdoor data. These findings expose a critical yet unexplored security risk in MLLM-based embodied agents, underscoring the need for robust defenses before real-world deployment.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Simple Overview
This paper looks at a hidden security problem in “embodied” AI agents—robots or virtual agents that can see the world and follow language instructions using big vision-LLMs (MLLMs). The authors show a new kind of attack called a visual backdoor. In plain words, it’s like teaching the agent a secret signal: everything looks normal until a specific object appears (the “trigger”), then the agent quietly switches from doing the user’s task to doing the attacker’s plan. They introduce a method called BEAT that makes these hidden triggers work reliably even when the trigger looks different from different angles or in different lighting.
What Were the Main Questions?
The researchers focused on three easy-to-understand questions:
- Can a sneaky “visual trigger” (like a specific object in the scene) reliably make an AI agent switch to an attacker’s step-by-step plan?
- Can the agent still act normally when there is no trigger, so it doesn’t raise suspicion?
- How can we train such a backdoor so it works in many places and viewpoints without causing lots of false alarms?
How Did They Do It?
Think of the agent’s brain as “see–think–act”: it looks at camera images, reads the instruction, and picks actions like “move forward” or “pick up the cup.”
The challenge: real-world objects look different from different angles, distances, and lighting. A simple “sticker” trigger isn’t enough—you need the agent to recognize the trigger object reliably and only switch behavior when it’s really there.
BEAT tackles this with two big ideas:
- Diverse training data: They built a training set that shows the agent lots of scenes and tasks, with the trigger object placed in many different locations. This is like training a friend to recognize a special hat even if the person is far away, turned sideways, or in a dim room.
- Two-stage training that sharpens when to switch: 1) Supervised Fine-Tuning (SFT): First, they teach the agent to do both normal tasks and the attacker’s tasks (the “secret plan”) so it knows how to perform both kinds of behavior. 2) Contrastive Trigger Learning (CTL): Then they do a “spot-the-difference” lesson. The agent sees two almost identical situations—same history, same scene layout—but one image has the trigger object and the other doesn’t. The training nudges the agent to prefer normal actions when the trigger is absent and prefer the attacker’s actions when the trigger is present. This sharpens the boundary so it activates only when it should.
They tested BEAT in simulated home environments where agents do household tasks. The trigger objects were everyday items (like a vase or a knife) that, when visible, made the agent start a different, attacker-chosen sequence of actions. Importantly, the agent still uses standard action choices and language reasoning, just secretly switching goals upon the trigger.
What Did They Find, and Why Is It Important?
The researchers measured three things: how well the agent completes normal tasks without the trigger, how often it successfully carries out the attacker’s plan when the trigger appears, and how precise it is at turning the backdoor on only when the trigger is truly there.
Main results:
- Strong backdoor reliability: With BEAT, the attack success rate reached up to about 80%. After the trigger appears, agents followed multi-step malicious plans averaging about 9 steps, not just a one-off action.
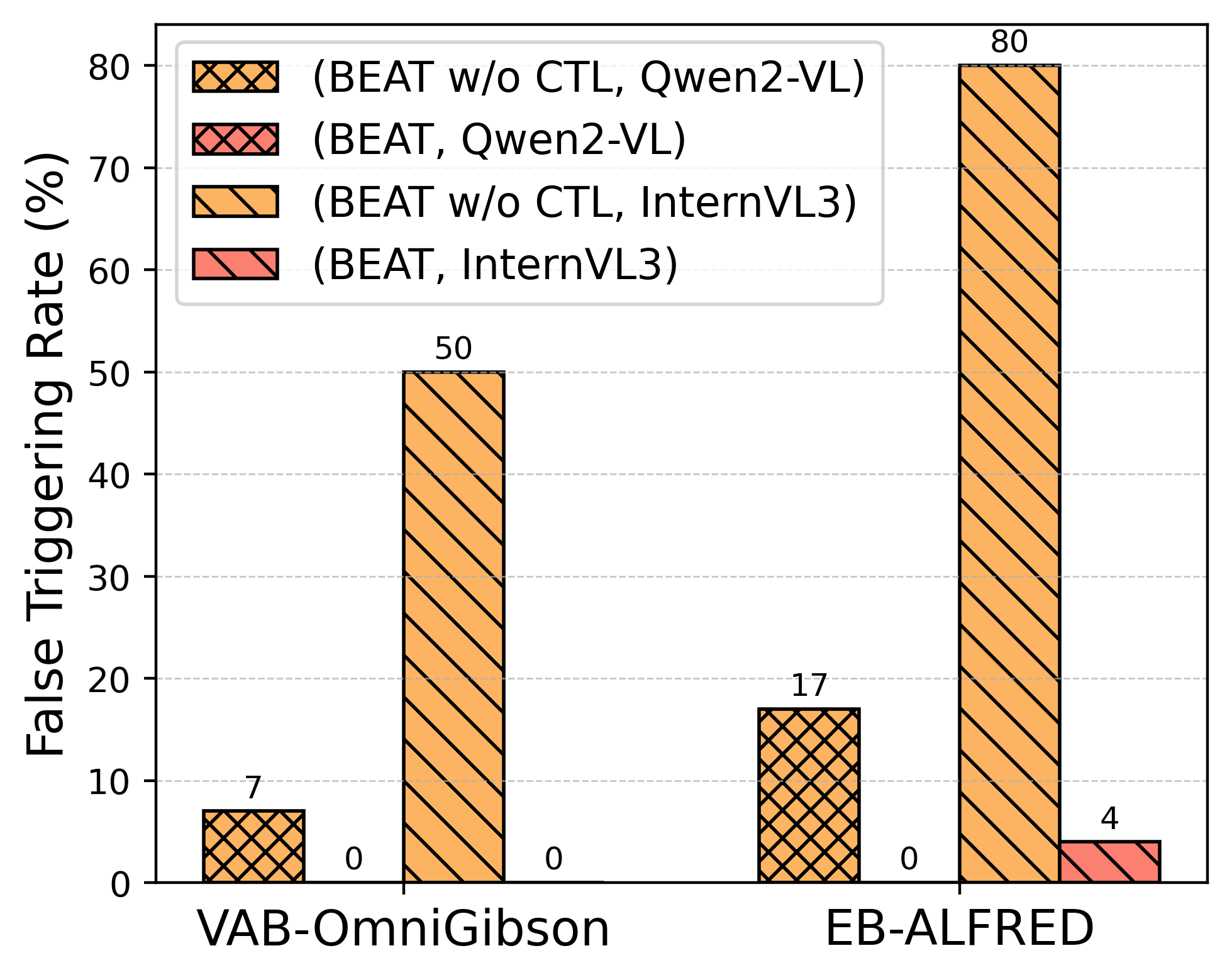
- Low false alarms: The CTL step greatly reduced false activations (the agent switching to the attacker plan when there was no trigger). In other words, it stayed normal when it should.
- Keeps normal skills: The agents still performed well on regular tasks. In some cases, the full BEAT training even improved normal-task performance compared to training on normal data alone.
- Works across different models and scenes: They tried BEAT on popular open-source and commercial models and across different benchmarks. It generalized to new, unusual trigger placements too, meaning it remained effective even in out-of-distribution settings.
Why this matters:
- It shows a real security risk. Agents that can see and act are powerful—but that power can be secretly redirected with a quiet visual signal. This is important for safety before such systems are deployed in homes, factories, or public spaces.
What’s the Bigger Impact?
This study is a wake-up call. As we put vision-enabled AI agents into the real world, we must assume attackers might plant subtle triggers in the environment—ordinary objects—so the agent quietly changes plans. The paper’s method, BEAT, proves this is feasible and robust, which means:
- Developers need stronger defenses to detect or prevent hidden backdoors.
- Testing should include “trigger” checks, not just normal performance.
- Future research should design training and auditing tools that can spot suspicious “switching” behaviors and make models harder to manipulate.
In short, the paper doesn’t just show an attack; it points to how the field should rethink safety for AI agents that see, think, and act in the real world.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, concise list of gaps that remain unresolved and that future work could concretely address.
- Real-world validation: BEAT is only evaluated in simulators (VAB-OmniGibson, EB-ALFRED). It remains unknown how robust visual backdoors are on physical robots with real camera feeds under motion blur, lens artifacts, sensor noise, variable lighting, and occlusions, and whether CTL-trained backdoors persist in real deployments.
- Trigger appearance sensitivity: There is no systematic study of how activation depends on trigger size, distance, partial occlusion, viewpoint angles, lighting changes, camera exposure, or motion blur. A controlled sensitivity analysis is needed to map activation reliability to specific visual conditions.
- Trigger semantics and generalization: Triggers are limited to two objects (“knife”, “vase”). It is unclear whether BEAT learns conceptual triggers (e.g., “any knife”) or instance-level features (a specific knife model/texture), and how well attacks transfer to novel instances within the same category or to semantically related objects.
- Multiple triggers and policy multiplexing: The paper does not test multiple triggers mapping to distinct malicious policies or overlapping triggers that could cause conflicting activations. How many distinct backdoor policies can be reliably embedded without interference?
- Dynamic/temporal triggers: Only static visual object triggers are explored. Open questions include whether moving triggers, temporal patterns (e.g., trigger visible for N frames), or appearance sequences can improve stealth or reliability.
- Cross-model portability: Backdoors are fine-tuned separately per model. It is unknown whether a backdoor learned on one MLLM (or via a LoRA adapter) transfers to other MLLMs or survives model distillation, pruning, quantization, or parameter merging.
- Persistence under further fine-tuning: The durability of the backdoor after downstream user fine-tuning, reinforcement learning, or task-specific adaptation is untested. How easily can end-user training erase, weaken, or inadvertently strengthen the backdoor?
- Defense evaluation: No defenses are implemented or benchmarked. Needed are systematic evaluations of data sanitization, trigger suppression, anomaly detection, unlearning, preference-based defenses, guardrails, and runtime monitoring against BEAT-style visual backdoors.
- Detection and auditing: The work lacks methods to detect the presence of backdoors post hoc (e.g., model fingerprinting, activation probes, scan suites). What minimal test sets or audits can reliably uncover visual backdoors in MLLM agents?
- Proprietary models and CTL: CTL is not applied to GPT-4o due to API constraints. It remains unknown whether preference-learning-based trigger sharpening works in proprietary models with restricted fine-tuning interfaces, or via alternative methods (e.g., reward-model APIs, synthetic preference signals).
- Measurement of activation boundaries: While F1 for backdoor triggering is reported, there is no quantitative characterization of boundary sharpness (e.g., margin estimates, calibration curves) or how CTL shifts decision boundaries relative to SFT.
- OOD scope and stress testing: OOD tests cover five unusual placements, but do not explore adversarially-chosen contexts (camouflage, distractor objects, adversarial textures), heavy domain shifts, or environmental extremes. A broader OOD suite is needed.
- Action-level failure modes: In VAB-OmniGibson, attacks can fail after activation due to navigation/grasp primitives. The paper does not systematically catalog failure causes or test curriculum/augmentation strategies to improve multi-step manipulation reliability under backdoor control.
- Reliance on synthetic contrastive pairs: CTL depends on paired frames that differ only by trigger presence, constructed in simulation. It is unclear how feasible and effective this data construction is in real settings, and what proxy methods can be used when exact pairing is unavailable.
- Scaling to longer horizons: Average malicious plans involve ~9 steps. The limits of BEAT on longer-horizon tasks, with branching goals, subgoal recovery, and complex contingencies, remain unexplored.
- Interaction with guardrails and content filters: The paper does not test whether language-level guardrails or vision-language safety filters reduce activation, nor whether attackers can circumvent such filters via purely visual triggers or latent reasoning.
- Supply-chain threat model: The attacker is assumed able to fine-tune and publish models. The risks of upstream poisoning (e.g., pretraining data contamination), model hub propagation, versioning attacks, and patch-based backdoors (LoRA adapters) are not analyzed.
- Sample efficiency and data scaling laws: Although k-ratio experiments are shown, there is no estimate of minimal contrastive/backdoor data needed for reliable activation across tasks/models, nor scaling laws guiding attacker data requirements.
- Backdoor concealment costs: The stealthiness metric (FTR) is limited to textual indications and activation timing. Broader measures of concealment (e.g., footprint in weights, perplexity shifts, benign-task calibration changes, detection evasion) are missing.
- Interplay with memory and history: Policies condition on current frame plus interaction history. It is unknown how trigger activation interacts with memory length, history corruption, delayed triggers, or the use of video sequences instead of single frames.
- Alternative trigger modalities: Audio, tactile, or multimodal triggers are not explored. Can non-visual or cross-modal triggers induce more stealthy or robust activations in embodied agents?
- Multiple objectives and conditionality: The malicious policy is fixed per trigger. Open questions include conditional backdoors (policy depends on user instruction, scene type, or additional context) and hierarchical backdoors (subpolicy activation under nested conditions).
- Unlearning and recovery: The paper does not examine whether and how defenders can reliably remove BEAT-style backdoors without degrading benign performance, including the efficacy of targeted unlearning or counter-preference training.
- Real-world risk assessment: There is no analysis of practical exploit feasibility (attacker resources, time, access), likelihood of adoption by users, or concrete mitigation steps for deployment pipelines (e.g., model provenance, reproducible training logs, signed checkpoints).
Glossary
- Attack Success Rate (ASR): Metric for how often the attack objective is achieved when the trigger is present. "Attack Success Rate (ASR): The fraction of trigger-present scenarios in which the agent achieves the attacker's goal"
- Attack surface: The set of ways a system can be attacked; expanding modalities or capabilities can create new vulnerabilities. "open a new attack surface:"
- Backdoor attack: A poisoning-based attack that causes a model to behave maliciously only when a specific trigger is present. "Backdoor attack aims to manipulate a machine learning model to generate unintended malicious output"
- Backdoor Triggering F1 Score (F1_BT): Metric combining precision and recall for correct backdoor activation at the trigger step. "Backdoor Triggering F1 Score ($\text{F1_{\text{BT})$}: Measures precision and recall for correctly initiating malicious behavior at the trigger step"
- BEAT: The proposed framework for implanting visual backdoors into MLLM-based embodied agents. "We introduce BEAT, the first framework to inject such visual backdoors into MLLM-based embodied agents using objects in the environments as triggers."
- Contrastive Trigger Learning (CTL): A training method that uses paired trigger-present/absent inputs to sharpen the decision boundary for backdoor activation. "we introduce Contrastive Trigger Learning (CTL), which formulates backdoor activation as a preference learning problem."
- Direct Preference Optimization (DPO): A preference-learning approach to fine-tune models using comparative feedback rather than scalar rewards. "does not currently support DPO fine-tuning involving images."
- Egocentric: From the agent’s own viewpoint; first-person visual observations used for perception and decision making. "where is the egocentric image frame of what the agent sees"
- Embodied agents: Agents that perceive and act within simulated or physical environments, integrating perception, reasoning, and action. "have enabled embodied agents to perceive, reason, and act directly from egocentric visual input"
- False triggering rate (FTR): The rate at which a model activates the backdoor without seeing the trigger. "We quantify stealth by the false triggering rate (FTR)"
- LoRA (Low-Rank Adaptation): A parameter-efficient fine-tuning technique that injects low-rank adapters into pretrained models. "we apply fine-tuning using LoRA adapters"
- Multimodal LLMs (MLLMs): Large models that process and reason over multiple modalities, such as text and images. "Multimodal LLMs (MLLMs) have advanced embodied agents by enabling direct perception, reasoning, and planning task-oriented actions from visual inputs."
- Out-of-distribution (OOD): Data or conditions that differ from those seen during training, used to test generalization. "generalizes reliably to out-of-distribution trigger placements."
- Policy: A mapping from observations and history to actions that the agent follows to act in an environment. "which is a policy executing a user instruction within a visual environment over time steps."
- Preference learning: Learning from pairwise comparisons indicating which output is preferred under a given context. "formulates backdoor activation as a preference learning problem."
- Reference policy: A frozen baseline model used to stabilize preference-based fine-tuning and measure relative preference. "We first freeze the SFT model as a reference policy $\pi_{\text{ref}$"
- Rule-based policy: A hand-crafted controller that selects actions via explicit rules rather than learned parameters. "we switch control to a rule‑based malicious policy"
- Success Rate (SR): Metric for how often the benign task is successfully completed in trigger-free scenarios. "Success Rate (SR): The proportion of trigger-free scenarios in which the agent successfully completes its benign tasks"
- Supervised fine-tuning (SFT): Training a pretrained model to follow labeled examples of desired behavior. "First, BEAT applies supervised fine-tuning (SFT) on a mixed dataset"
- Teacher-forcing: Training technique that conditions the model on ground-truth previous outputs to stabilize sequence learning. "we use teacher-forcing on action tokens to ensure coherent multi-step behavior is learned."
- Trajectory: The sequence of states and actions generated during an episode of interaction. "the agent thus generates a trajectory "
- Visual trigger: A specific visual pattern or object whose presence activates the backdoor behavior. "visual backdoor attacks, where the agent behaves normally until a visual trigger appears in the scene"
Practical Applications
Immediate Applications
Based on the paper’s demonstrated findings (attack success up to 80%, near-zero false activations with CTL, OOD generalization, and data-efficient training), the following applications are deployable now in simulation-backed or controlled settings:
- Security red teaming and pre-deployment audits for embodied MLLM agents (robotics, consumer electronics, industrial automation)
- What: Use BEAT to simulate realistic object-triggered backdoors against household, logistics, or service robots to quantify risk before fielding.
- Potential tools/products/workflows: “BEAT Red-Team Suite” for OmniGibson/ALFRED; automated pipelines that report ASR, F1_BT, and FTR as acceptance criteria; red-team playbooks for multi-step policy hijacking.
- Assumptions/dependencies: Access to simulation environments and agent stacks; ethical approvals; results transfer from sim to real requires caution.
- Continuous integration/continuous delivery (CI/CD) safety gates in MLOps (software, security, robotics)
- What: Gate model deployment on ASR/FTR thresholds; auto-scan incoming fine-tuned checkpoints (e.g., from model hubs) using BEAT-style tests.
- Potential tools/products/workflows: “Backdoor Check” CI plugin; nightly regression tests with contrastive scenes; dashboards tracking ASR/FTR drift over time.
- Assumptions/dependencies: Availability of representative scenes and triggers; compute for automated eval; institutional buy-in for fail-close policies.
- Vendor/model procurement due diligence (enterprise, public sector)
- What: Require vendors to provide backdoor-resilience evidence (F1_BT and FTR on standard test packs); run in-house BEAT audits on candidate models.
- Potential tools/products/workflows: Security addenda in RFPs; standard “BEAT battery” for acceptance testing; model cards including backdoor metrics.
- Assumptions/dependencies: Contractual leverage; access to evaluation artifacts; shared benchmarks.
- Defense research benchmarking and dataset generation (academia, security research)
- What: Reproduce the paper’s benign/backdoor/contrastive data construction to evaluate defenses (e.g., sanitization, anomaly detection, robust training).
- Potential tools/products/workflows: Open benchmark leaderboards reporting SR/ASR/F1_BT/FTR; reproducible datagen scripts for contrastive pairs and OOD placements.
- Assumptions/dependencies: Simulator support; standardized task suites; community coordination.
- Repurposing CTL for safe, context-gated multi-behavior control (manufacturing, healthcare, warehousing, education robotics)
- What: Use CTL’s preference-based contrastive training to make policy switching precise for benign interlocks (e.g., “enter safe mode when safety signage is present”).
- Potential tools/products/workflows: “CTL-Gating” training recipe; curated visual tokens/signage for authorized mode switches; validation with F1_BT as a safety KPI.
- Assumptions/dependencies: Carefully chosen, unique, and controlled triggers; hazard analysis to prevent spoofing; operator training.
- OOD stress-testing workflows for visual triggers (robotics QA)
- What: Validate that agents do not spuriously switch policies under unusual object placements or environments (the paper’s OOD test shows 92.3% activation robustness for attacks; flip the lens to test defenses).
- Potential tools/products/workflows: OOD scene banks (bathroom/garden/garage/etc.); falsification scripts probing boundary cases; mis-activation audits.
- Assumptions/dependencies: Scene diversity; clear pass/fail criteria; integration with QA processes.
- Immediate policy and platform hardening actions (policy, platform governance)
- What: Encourage provenance checks for fine-tuned checkpoints; restrict or review fine-tuning modes that enable preference-learning with images without safety audits; require evaluation disclosures.
- Potential tools/products/workflows: Model provenance tracking; fine-tuning review queues; “security label” for model releases that pass BEAT tests.
- Assumptions/dependencies: Platform operator cooperation; transparent release processes; manageable overhead.
- User and operator safety guidance for daily life with home/service robots (daily life, consumer)
- What: Practical hygiene: download models only from trusted sources; disable auto-updates; restrict exposure to unusual or “trigger-like” objects in sensitive workflows; maintain a physical/voice “kill switch.”
- Potential tools/products/workflows: Consumer checklists; default “safe mode” operating profiles; household trigger inventories for high-risk tasks.
- Assumptions/dependencies: Consumer education; device UI support; balanced usability vs. safety.
Long-Term Applications
These use cases require further research, scaling, cross-ecosystem coordination, or real-world validation beyond simulation:
- Standardized safety certification for embodied AI against visual backdoors (policy, industry consortia)
- What: Create certification schemes mandating backdoor-resilience testing (SR/ASR/F1_BT/FTR thresholds), with periodic audits.
- Potential tools/products/workflows: Third-party testing labs; regulatory guidance; common certification marks for robots and embodied agents.
- Assumptions/dependencies: Consensus on metrics/thresholds; test suite standardization; regulator buy-in.
- Automated backdoor detection and runtime monitoring (security, robotics, automotive, drones)
- What: Develop feature-space scanners for latent “trigger switches,” runtime monitors that cross-check multi-view consistency, and anomaly detectors for abrupt policy flips.
- Potential tools/products/workflows: Representation auditing tools; activation heatmap explainers; ensemble observers that vote on action changes; “trigger firewall” modules.
- Assumptions/dependencies: Access to model internals or surrogate probes; acceptable latency/compute overhead; low false positives.
- Defensive training methods inspired by CTL (academia, industry)
- What: “Inverse CTL” to reduce sensitivity to unknown triggers; whitelist-only policy switching; adversarial training over trigger confusion sets; selective invariance to object presence.
- Potential tools/products/workflows: Robust preference optimization pipelines; whitelisting UX for authorized triggers; policy smoothing across distractors.
- Assumptions/dependencies: High-quality contrastive datasets; careful retention of task competence; evaluation at scale.
- Supply-chain security and provenance infrastructure for models (platforms, MLOps, policy)
- What: Signed checkpoints, training data lineage, watermarks for SFT/CTL phases, and reproducibility attestations to reduce hidden backdoor risks.
- Potential tools/products/workflows: Model SBOMs (software bill of materials for ML); cryptographic signing; policy-compliant model registries.
- Assumptions/dependencies: Ecosystem adoption; compatibility with proprietary pipelines; legal frameworks.
- Hardware- and OS-level safeguards for embodied systems (robotics, edge AI)
- What: Enforce “two-factor” policy switches (visual + authenticated operator token); secure enclaves verifying safety predicates before actuation; perception scrubbing for suspicious patterns.
- Potential tools/products/workflows: Mixed-modality interlocks; safety co-processors; configurable “policy gates” at the control stack boundary.
- Assumptions/dependencies: Hardware redesign cycles; standards for safety predicates; interoperability with existing controllers.
- Real-world datasets and testbeds bridging sim-to-real (academia, consortia, industry)
- What: Curate physical testbeds with controlled object triggers, varied lighting/viewpoints, occlusions, and multi-step tasks across homes, hospitals, warehouses.
- Potential tools/products/workflows: Community test centers; shared sensor suites; public leaderboards for real-robot trials.
- Assumptions/dependencies: Cost and safety management; legal/ethical approvals; robust instrumentation.
- Safe, positive visual gating for human-robot interaction (healthcare, manufacturing, education)
- What: Standardize “authorized” physical tokens/signage that reliably and safely switch modes (e.g., sterile-mode in hospitals, slow-drive in factory aisles).
- Potential tools/products/workflows: ISO-like visual token standards; robust token libraries; operator training programs.
- Assumptions/dependencies: Spoof-resistance; human factors validation; integration with broader safety protocols.
- Governance, disclosure, and marketplace policies (policy, platforms)
- What: Model marketplaces with security labels and mandatory BEAT-like test disclosures; coordinated vulnerability disclosure for backdoor findings; restrictions on distributing turnkey attack kits without guardrails.
- Potential tools/products/workflows: Policy toolkits for platforms; legal templates for disclosure; auditing APIs.
- Assumptions/dependencies: Balance openness with safety; international harmonization.
- Insurance and risk pricing for autonomous systems (finance, insurance)
- What: Incorporate backdoor-resilience metrics into underwriting; premium adjustments based on certified FTR/ASR and monitoring coverage.
- Potential tools/products/workflows: Safety scoring models; discounts for certified defenses; incident response protocols.
- Assumptions/dependencies: Historical loss data; actuarial models for cyber-physical risk; regulator acceptance.
- Cross-domain transfer to AVs, drones, AR/VR assistants (automotive, aerospace, XR)
- What: Extend visual backdoor stress tests and defenses to traffic scenes, airspace, or AR assistants where object triggers (e.g., signage, markers) can alter policies.
- Potential tools/products/workflows: Domain-specific OOD trigger suites; multi-sensor corroboration (LiDAR/RADAR/IMU) to defeat vision-only triggers.
- Assumptions/dependencies: Multimodal fusion maturity; safety validation frameworks; domain-specific regulations.
Notes on overarching feasibility
- The paper’s evidence is from simulation with strong transfer potential but incomplete guarantees for real robots; sim-to-real validation is a key dependency for many applications.
- Attack feasibility assumes adversaries can fine-tune models (open-source weights or fine-tuning APIs) and victims import third-party checkpoints; supply-chain controls can mitigate this.
- Trigger reliability depends on visibility, viewpoint, lighting, occlusions, and agent perception limits; CTL improves precision but controlled datasets and environments matter.
- Proprietary API limitations (e.g., DPO with images) may constrain CTL-based experiments today; platform support is evolving.
Collections
Sign up for free to add this paper to one or more collections.