- The paper introduces a hybrid framework combining force-feedback imitation learning for tape detachment and numerical optimization for tape placement.
- It demonstrates safe and efficient tape removal by evaluating metrics such as effective removal length and applied force on various substrates.
- The integrated system achieves near-complete coverage and stable adhesion on complex anatomical models, advancing automated wound care.
Autonomous Tape Handling for Robotic Wound Redressing: Technical Summary
This paper presents a hybrid robotic framework for automating adhesive tape manipulation in wound redressing, addressing two critical subtasks: tape initial detachment (TID) and secure tape placement. The work is motivated by the clinical need for scalable, safe, and effective wound care automation, particularly in home settings where chronic wounds are prevalent and professional care resources are limited.
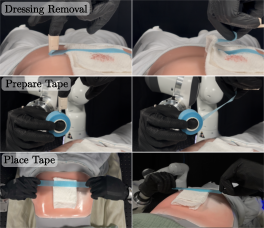
Figure 1: This work enables advanced tape manipulation skills such as tape initial detachment (TID), and tape placement, automating dressing removal, tape preparation, and tape placement for wound redressing.
The wound redressing pipeline involves multiple steps, with tape manipulation being central to both dressing removal and reapplication. The authors decompose the problem into two distinct phases:
- Tape Initial Detachment (TID): Initiating the separation of adhesive tape from skin or dressing, a contact-rich, highly nonlinear process.
- Tape Placement: Applying tape to secure dressings, requiring precise trajectory planning to avoid wrinkles and ensure robust adhesion across complex anatomical surfaces.
The system integrates a dexterous robotic hand (with a 3D-printed fingernail for TID), force/torque sensing, and multi-view RGBD perception. Data-driven and model-based approaches are combined to address the unique challenges of each phase.
Imitation Learning for Tape Initial Detachment
TID is formulated as a sequential decision-making problem under complex adhesive dynamics. The authors employ a force-feedback-enabled teleoperation platform to collect expert demonstrations, capturing RGB images, segmented masks, and force profiles. Semantic segmentation isolates task-relevant regions, improving generalization across backgrounds and substrates.
The policy is trained using an Action Chunking Transformer (ACT) architecture, mapping observations (segmented images and force vectors) to future tip-centric position actions. The policy is evaluated on phantom surfaces, human skin, and tape rolls of varying radii.
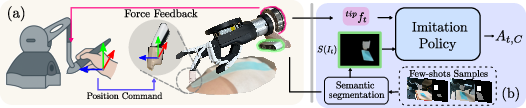
Figure 2: The TID framework leverages human teleoperation for demonstration collection and trains an imitation policy on segmented image and force data to predict future tip movements.
Quantitative metrics include effective removal length (ERL) and applied force. Imitation learning (IL) policies outperform motion planning (MP) baselines in both ERL and safety (lower force), with force-feedback IL (FF-IL) achieving the lowest force profiles. Notably, IL policies generalize to out-of-distribution cases (human skin, tape rolls), though performance drops on unseen substrates due to material property differences.
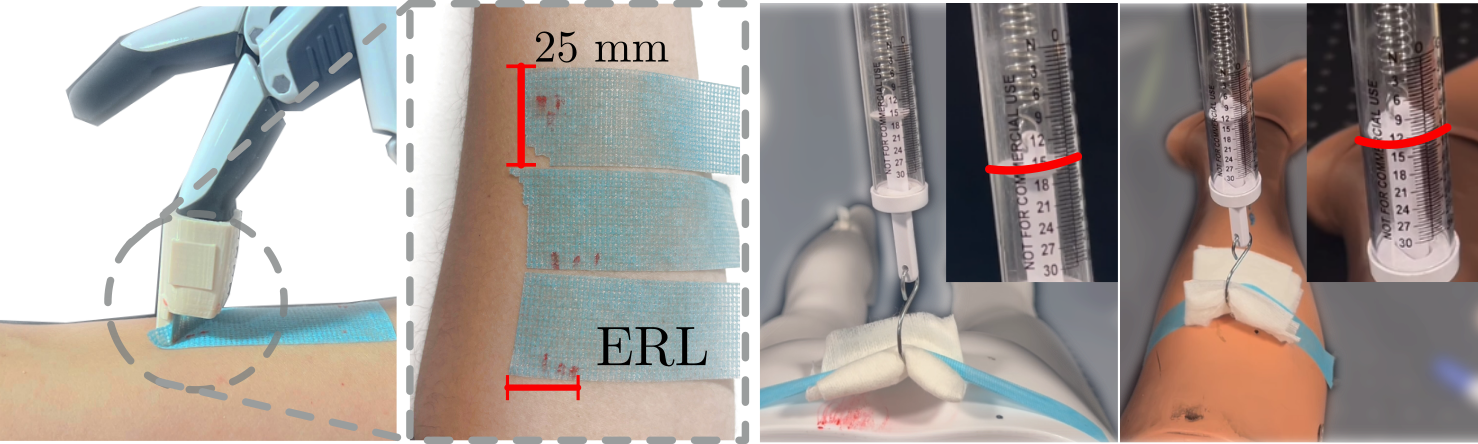
Figure 3: ERL quantifies tape detachment, while tape placement security is measured by maximum removal force during forceful extraction.
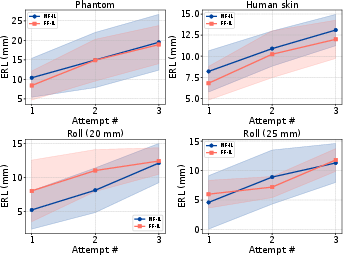
Figure 4: ERL increases linearly with the number of TID attempts, indicating improved outcome with repetition.
Numerical Trajectory Optimization for Tape Placement
Tape placement is addressed via a numerical optimization framework that models the tape as a chain of rigid elements. The algorithm iteratively computes optimal robot end-effector poses and tension directions to achieve smooth, wrinkle-free adhesion, subject to constraints on tape length, tension, and rotational movement.
Key geometric concepts include:
- Closest point projection of tape elements onto the skin surface.
- Surface normal computation for each element.
- Rotation axis determination via cross products of adjacent normals.
- Adhesion detection via proximity thresholding.
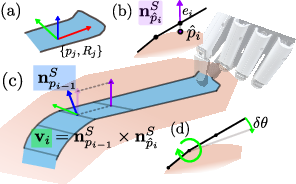
Figure 5: Geometric modeling of tape placement, including element positions, surface normals, and rotation axes for conformal adhesion.
The method supports bi-manual tape placement by symmetrically planning trajectories for both ends, starting from the tape's midpoint. Impedance control with residual compensation is used during execution to maintain tension and compensate for discretization errors.
Experimental Evaluation
Experiments are conducted on anatomical models (leg, hip, heel) and human skin, simulating clinically relevant wound care scenarios. Metrics for tape placement include coverage percentage (ratio of adhered tape length to total tape length) and maximum removal force (MRF).
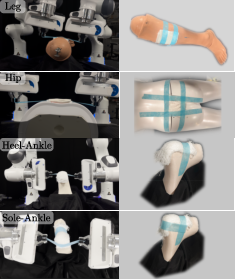
Figure 6: Execution and outcome of planned tape placing trajectories for leg, hip, and heel geometries, demonstrating multi-tape placement capability.
Results show that impedance control with residual compensation achieves near-complete coverage (up to 100%) and stable, high MRF across all geometries, outperforming baseline and position control strategies. The method generalizes to challenging surfaces (heel, sole) where other approaches fail to achieve reliable adhesion.
Integrated Pipeline Demonstration
The full pipeline is demonstrated on a manikin, automating dressing removal (via TID and trajectory optimization), tape preparation, and secure tape placement. The system combines learned and model-based components to execute multi-step wound redressing autonomously.
Limitations and Future Directions
The TID policy exhibits reduced performance on out-of-distribution substrates due to limited material generalization. Offline RL finetuning with diverse data and reward shaping is suggested to address this gap. Tape placement coverage is constrained by surface reconstruction noise; improved perception and local pressing strategies could enhance adhesion. Several pipeline steps (tape grasping, cutting, high-level planning) remain manual or teleoperated, indicating the need for further automation.
Future research should focus on:
- Multi-modal perception (vision, force, tactile, bio-signal) for robust context-aware operation.
- Adaptive planning and control via self-supervised or RL methods for broader generalization.
- Integration of wound debridement, cleaning, and dressing application for end-to-end autonomy.
Conclusion
This work establishes a technical foundation for autonomous tape handling in robotic wound redressing, combining force-aware imitation learning for detachment and numerical trajectory optimization for placement. The hybrid approach demonstrates reliable performance across diverse anatomical geometries and clinical scenarios, with strong quantitative results in coverage and safety. The framework addresses key challenges in contact-rich manipulation and geometry-sensitive placement, advancing the state of the art in medical robotics for home healthcare. Further developments in perception, control, and workflow integration are required to achieve fully autonomous wound care systems.