- The paper presents a novel information-theoretic framework for objectively detecting and ranking planes from depth images, reducing false positives.
- It integrates discrete depth data and sensor noise models into model selection, outperforming traditional RANSAC and neural network methods.
- Experiments on synthetic and real-world datasets validate the approach, demonstrating improved segmentation quality for robotics and mapping.
Introduction
This paper presents a principled framework for plane detection in depth images, addressing the limitations of conventional RANSAC-based approaches. The authors propose an information-theoretic model selection criterion that leverages the discrete nature of depth sensor data and incorporates sensor physics and noise models. The method aims to objectively determine the true number of planes in a scene, prevent false positives, and provide a ranking of detected planes based on their information reduction. The approach is validated on both synthetic and real-world datasets, demonstrating improved accuracy and robustness compared to standard RANSAC and neural network-based methods.


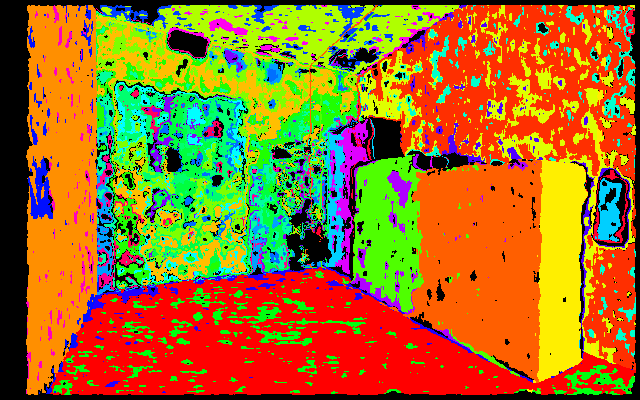
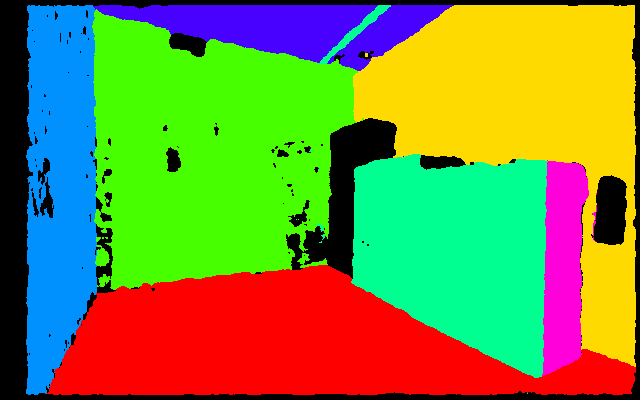
Figure 1: RGB image of a scene used for plane detection evaluation.
Background and Motivation
Plane detection is a fundamental task in robotics and computer vision, with applications in navigation, mapping, and scene understanding. Traditional methods such as RANSAC offer probabilistic guarantees but suffer from ambiguous inlier threshold selection, slow convergence in complex scenes, and susceptibility to false positives when the true number of planes is unknown. Deep learning methods, while promising, are limited by the quality of ground truth data and often rely on RGB inputs, which may not capture geometric constraints effectively.
The proposed framework builds on the information-theoretic approach of Yang and Förstner, extending it by integrating sensor noise models and assignment mask penalties to prevent overfitting. The method treats each depth observation as a discrete random variable, and candidate plane models are generated via random sub-sampling. The model with the minimum information is selected as the most likely ground truth, and the information reduction metric is used to rank plane quality.
Let X be a set of k points in Rn, each lying on discrete intervals determined by the sensor resolution. The goal is to find the optimal number of planes N⋆ and assignment mask M⋆ that minimize the total model information ΦN,M. The information for each model is computed by considering the likelihood of points being assigned to planes or treated as outliers, with penalties for model complexity and sensor noise.
The information for a model with N planes is given by:
ΦN=kln(N+1)+k0nln(R/ϵ)+i=1∑N[nln(R/ϵ)+ki(n−1)ln(R/ϵ)+j=1∑ki(21σ2(ni⋅xj+di)2+21ln(ϵ22πσ2))]
where k0 is the number of outliers, ki is the number of inliers for plane i, ni and di are the plane parameters, and σ is the sensor noise.
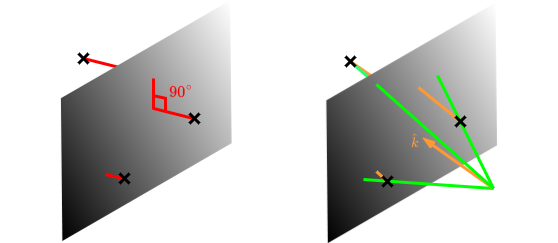
Figure 2: In the generalised plane detection problem, δ(xi) is the normal distance between xi and the plane, but for depth images, it is the parallel distance along the z-axis.
The assignment mask penalizes models with excessive planes, and the sensor noise model can be depth-dependent, further refining the information calculation.
Algorithmic Implementation
The algorithm proceeds by:
- Generating candidate planes via repeated random sub-sampling.
- Assigning points to planes or outlier status based on their contribution to information reduction.
- Selecting the model with the minimum total information as the ground truth.
- Ranking detected planes by their total information reduction.
To accelerate computation, semantic segmentation (e.g., using SAM) is used to partition the depth map, increasing the inlier ratio within each partition and reducing the search space.
Experimental Results
Synthetic Data
Experiments on synthetic depth images (staircase and tetrahedron scenes) with added Gaussian noise demonstrate that the proposed method accurately detects the true planes and rejects spurious planes generated from noise, unlike Open3D's RANSAC-based segmentation.
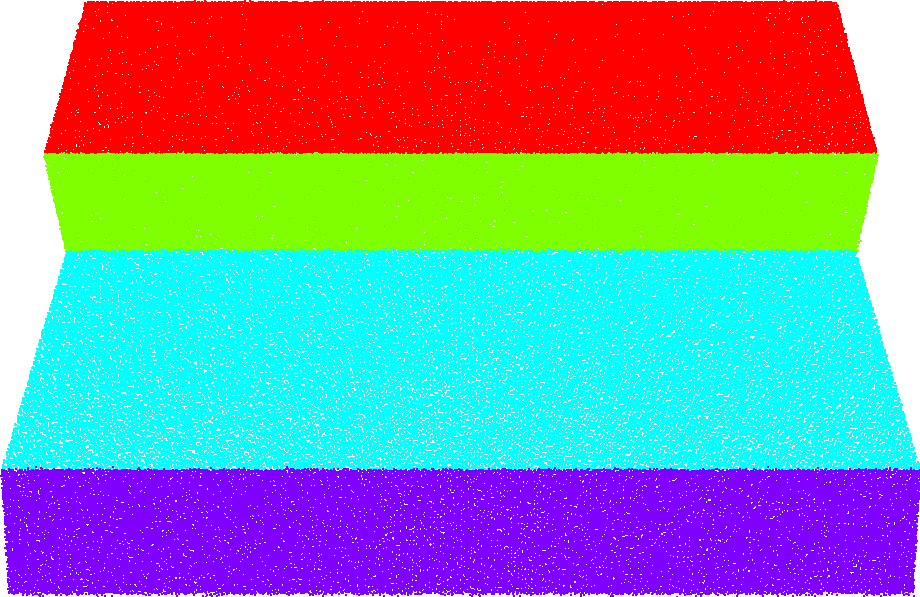
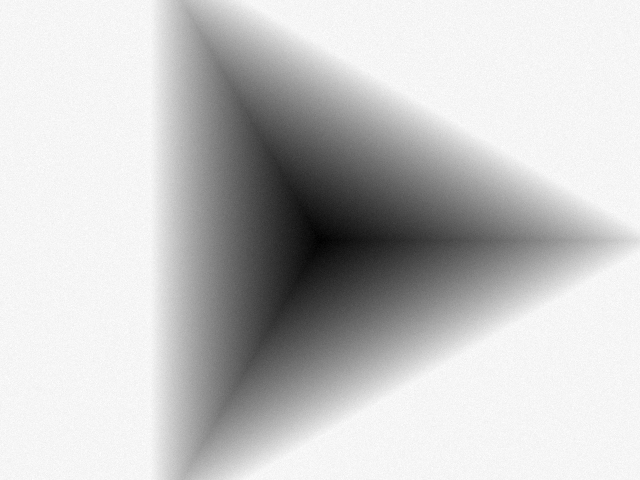
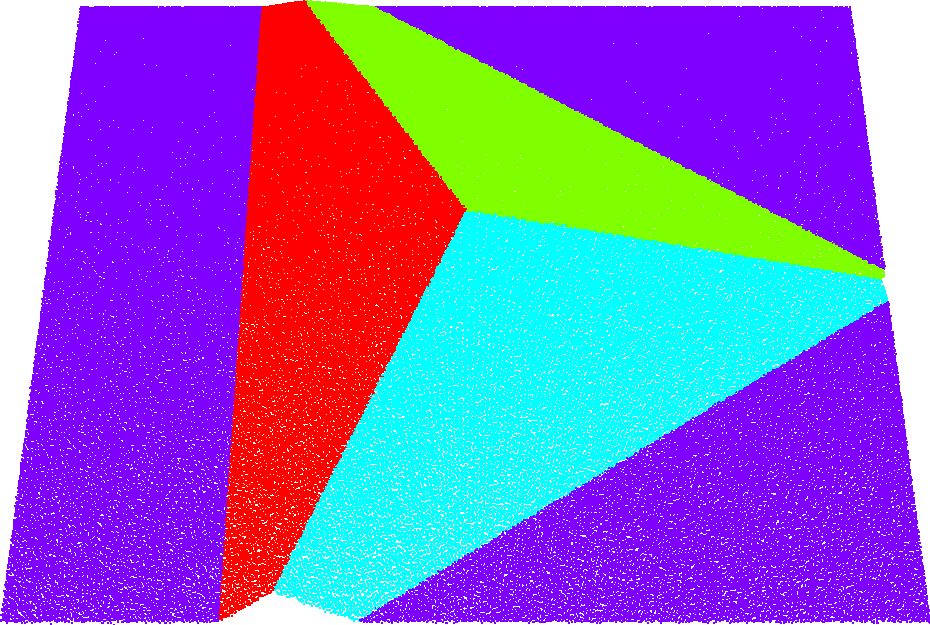
Figure 3: Depth image of a synthetic scene used for plane detection.
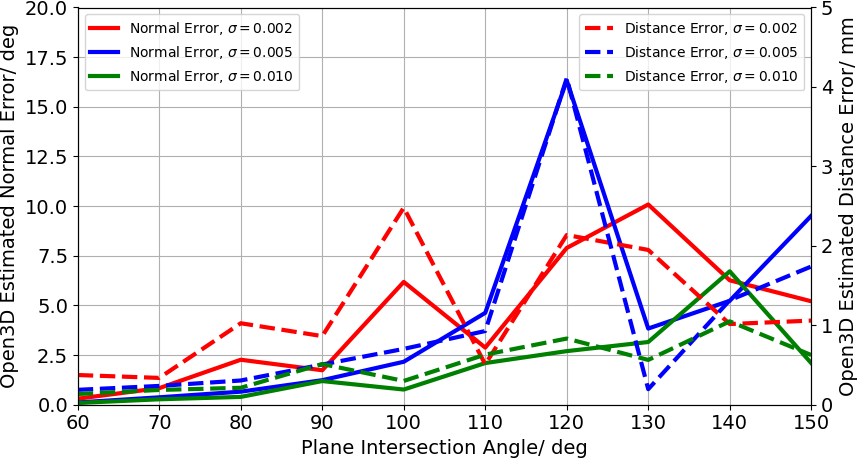
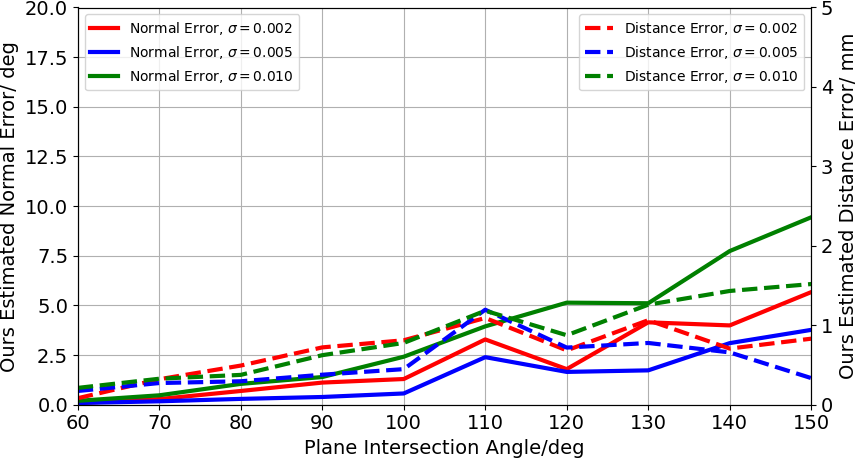
Figure 4: Graph of estimated normal and distance errors against plane intersection for both the Open3D and our approach. The scale of the x and y-axis are kept consistent between graphs.
The method also provides a ranking of plane quality, correctly ordering planes corrupted by sinusoidal noise according to their degradation.
Real-World Data (NYU-v2)
On the NYU-v2 dataset, the method outperforms neural network-based plane segmentation approaches in VOI, RI, and SC metrics, especially when using a proportional noise model. Qualitative results show improved segmentation of dominant planes and reduced fragmentation compared to ground truth masks.

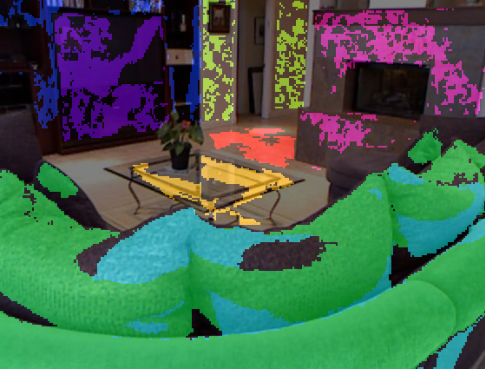

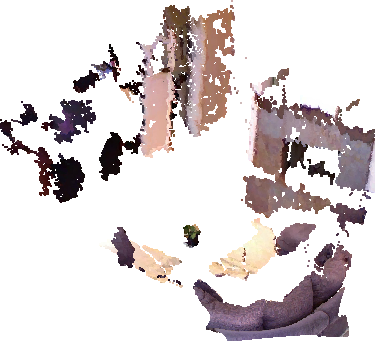
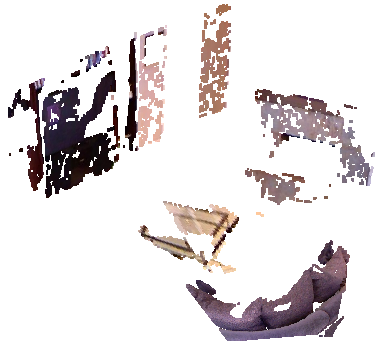
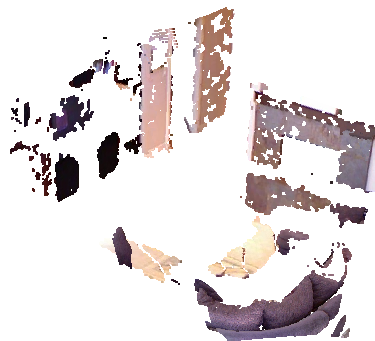



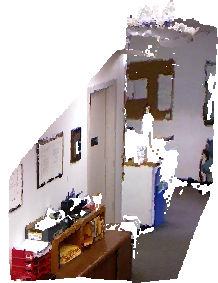

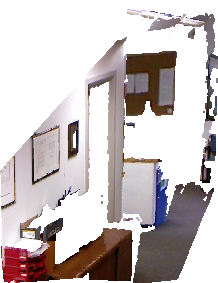




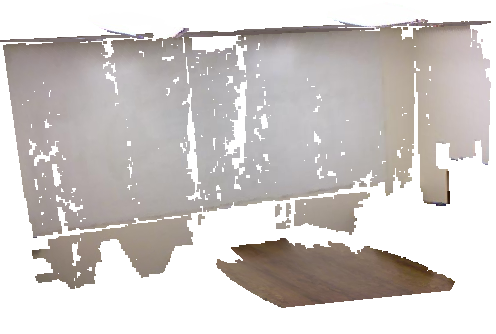

Figure 5: RGB image from NYU-v2 dataset used for real-world plane detection.
Runtime and Limitations
The Python implementation averages 308 seconds per frame (including segmentation), while a C++ version reduces this to 21 seconds (without segmentation). The main limitation is ambiguity in mask assignment near plane intersections, which can be partially mitigated by post-processing based on surface normals, though this is sensitive to sensor noise.
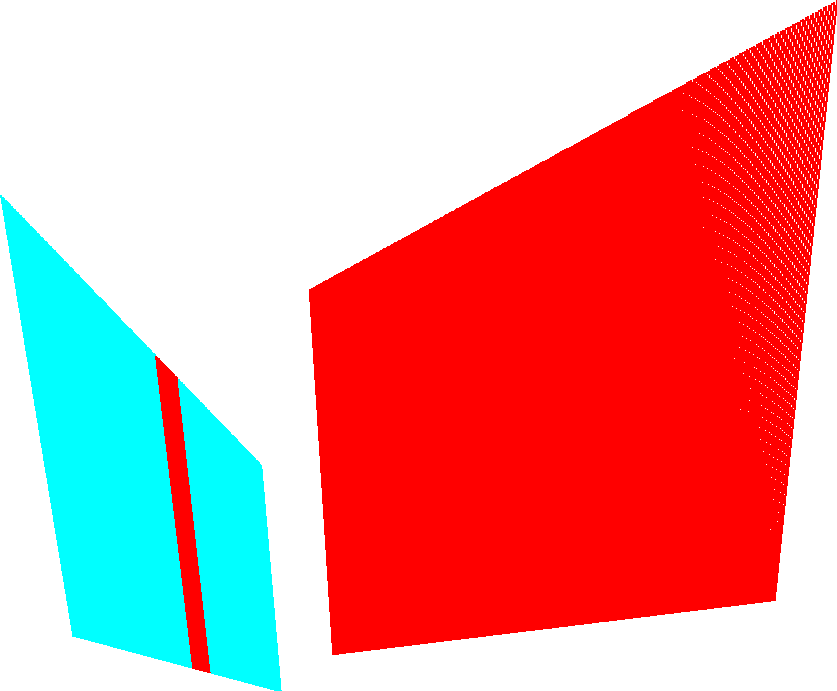
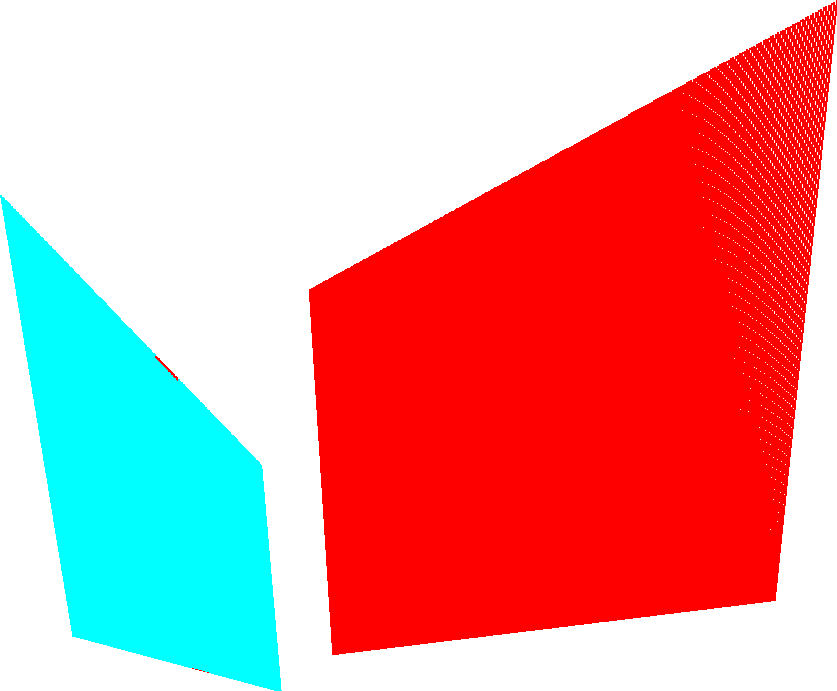
Figure 6: No post-processing: points along plane intersections may be misassigned due to ambiguity.
Practical and Theoretical Implications
The information-theoretic framework provides a rigorous, objective criterion for plane detection, eliminating the need for manual threshold tuning and reducing false positives. The approach is robust to sensor noise and adaptable to different sensor models. The ranking metric enables downstream applications to select high-quality planes for tasks such as navigation, mapping, and CAD model generation.
Theoretically, the method advances model selection in geometric computer vision by integrating discrete data constraints, sensor physics, and complexity penalties. It also highlights the limitations of current ground truth datasets and neural network training paradigms, suggesting that improved plane masks can enhance learning-based methods.
Future Directions
Future work may focus on concurrent estimation of all plane parameters (e.g., MultiRANSAC), integration of localised plane estimation methods, and further acceleration via parallelization or GPU implementation. Addressing intersection ambiguity and improving robustness to noise remain open challenges.
Conclusion
The proposed model information optimization framework for plane detection offers significant improvements over conventional RANSAC and neural network-based methods, both in accuracy and reliability. By leveraging information-theoretic principles and sensor models, the approach provides objective plane detection and ranking, with practical utility in robotics and computer vision. Further research may extend the framework to more complex scenes and enhance computational efficiency.

