- The paper introduces a unified workflow that integrates secure SNN training and deployment, significantly enhancing energy efficiency and real-time performance.
- The paper demonstrates robust fault tolerance by comparing SNNs with conventional CNNs under varied hardware-induced failures.
- The paper highlights hardware and software optimizations, including quantization and neural architecture search, to reduce energy consumption and carbon emissions.
Neuromorphic Computing for Embodied Intelligence in Autonomous Systems
The paper "Neuromorphic Computing for Embodied Intelligence in Autonomous Systems: Current Trends, Challenges, and Future Directions" (2507.18139) explores the application of neuromorphic computing within autonomous systems, including self-driving vehicles and UAVs. The authors emphasize the potential of Spiking Neural Networks (SNNs) to deliver energy-efficient, real-time intelligence by mimicking biological neural processing. This essay provides an expert summary of the key contributions, implications, and future directions highlighted in the paper.
Overview of Neuromorphic Computing
Neuromorphic computing is positioned as a critical technology for realizing energy-efficient, adaptive autonomous systems. The cornerstone of this approach is the use of Spiking Neural Networks, which process information via discrete spikes, analogous to biological neurons.
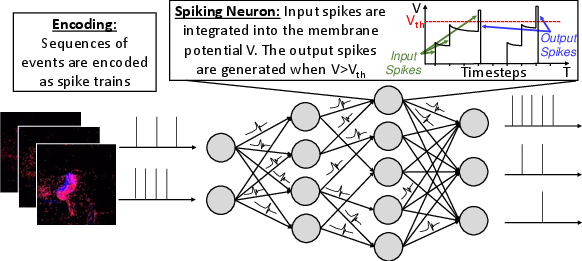
Figure 1: Basic functionality of an SNN, where input events are encoded into spike trains, and the neuron integrates these into its membrane potential.
Neuromorphic chips like IBM's TrueNorth and Intel's Loihi provide hardware solutions optimized for executing SNNs with minimal power consumption. These platforms leverage the event-driven nature of neuromorphic processing, permitting real-time responses to dynamic inputs.
A Unified Workflow for SNN Deployment
The paper outlines a comprehensive workflow designed to integrate secure, efficient, and reliable SNNs into neuromorphic systems for autonomous agents.
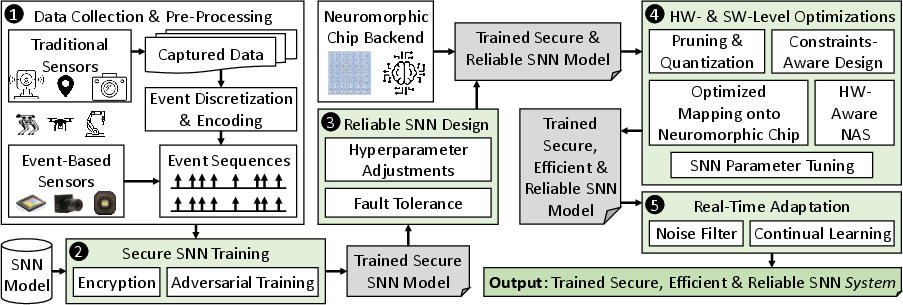
Figure 2: Overview of the proposed workflow. After collecting data from sensors and pre-processing, secure SNN training is conducted to obtain a trained secure SNN model. Afterward, reliable SNN design is conducted to obtain a reliable SNN model on the neuromorphic chip backend. Further HW- and SW-level optimizations for energy efficiency are conducted. Real-time adaptation is integrated to obtain secure, efficient, and reliable SNN systems.
This workflow begins with data acquisition from event-based sensors, followed by preprocessing stages that transform raw input into suitable spike-encoded sequences. Secure training techniques, using adversarial training and encryption like the BFV scheme, ensure models are robust and privacy-preserving, as demonstrated with encrypted SNN performance on the FashionMNIST dataset.
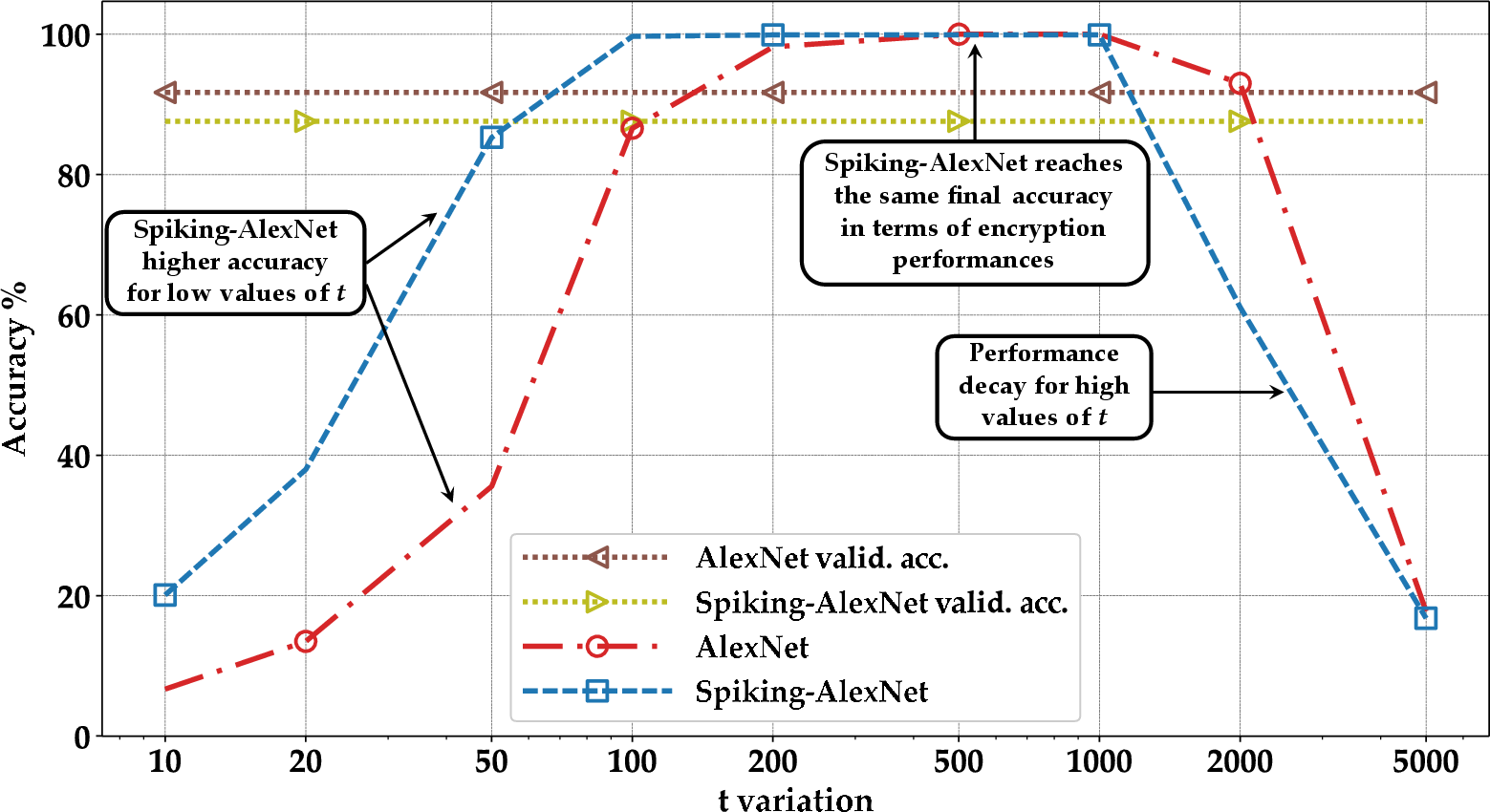
Figure 3: Accuracy comparison between AlexNet and Spiking-AlexNet for the FashionMNIST dataset, when the models are encrypted using the BFV scheme, varying the plaintext modulus t. Figure adapted from~\cite{nikfam2023homomorphic.
Reliable and Adaptive SNN Design
The development of robust SNNs incorporates tuning of structural parameters such as voltage threshold and spike integration windows, enhancing their ability to handle variability.
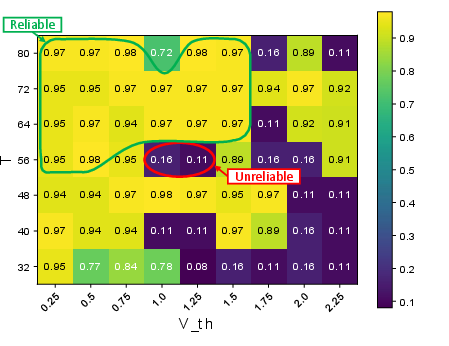
Figure 4: Robustness comparison of 4-layer SNNs on MNIST, varying the voltage threshold Vth.
Additionally, fault-injection studies reveal SNNs' inherent fault tolerance compared to traditional models like ResNet and VGG on various datasets, underscoring their suitability for resilient computing in unreliable environments.
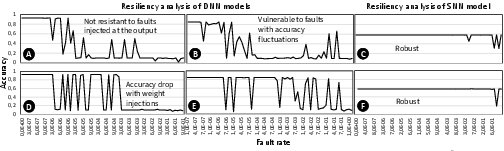
Figure 5: Comparison of test accuracy for different models under fault injection. A: Output injection on the ResNet18 for the CIFAR-10 dataset. B: Output injection on the VGG11 for the CIFAR-10 dataset. C: Output injection on a 4-layer SNN on the DVS-Gesture dataset. D: Weight injection on the ResNet18 for the CIFAR-10 dataset. E: Weight injection on the VGG11 for the CIFAR-10 dataset. F: Weight injection on a 4-layer SNN on the DVS-Gesture dataset. Figure adapted from~\cite{colucci2022enpheeph.
HW and SW Optimizations
Optimization at both hardware and software levels is necessary for maximizing SNN efficiency. Quantization and pruning are essential to conserve energy and memory.
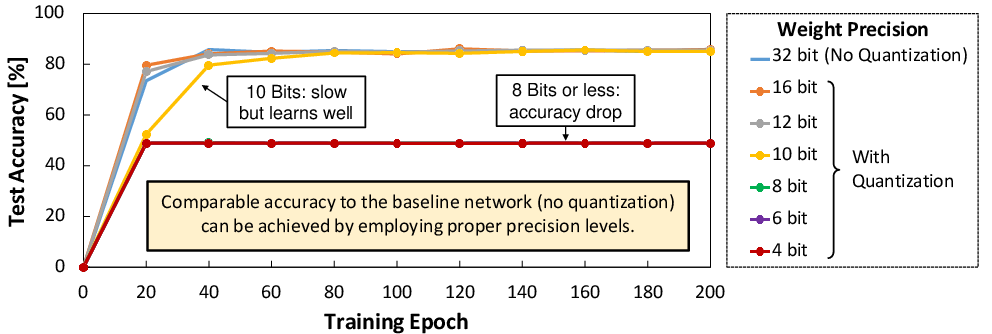
Figure 6: Accuracy of the CarSNN model on the NCARS dataset across different precision levels (from 32 bits to 4 bits). Figure adapted from~\cite{putra2024snn4agents.
Learning rate strategies, such as FastSpiker's exponential decay and warm restarts, enhance training speed and reduce carbon emissions, indicating environmental benefits in SNN training.
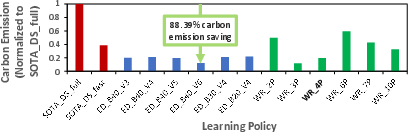
Figure 7: Exploration of different learning rate policies for the CarSNN model on the NCARS dataset and their impact on carbon emission, compared to the baseline. Figure adapted from~\cite{bano2024fastspiker.
Memory footprint reductions achieved by hardware-aware NAS demonstrate significant savings, facilitating scalable deployment in edge scenarios.
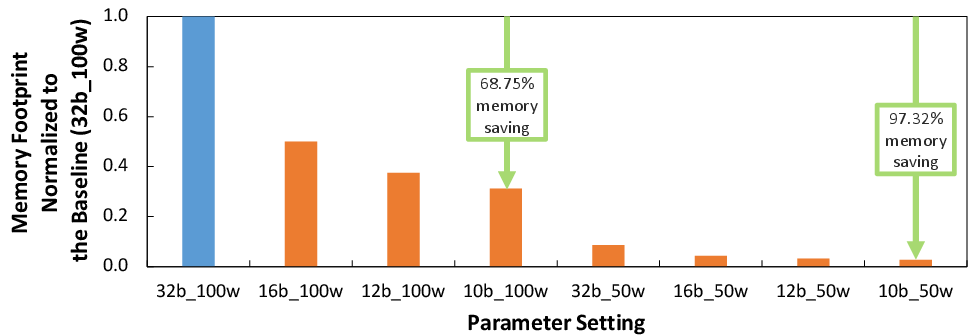
Figure 8: Exploration of different parameter configurations of the CarSNN model on the NCARS dataset and their impact on the SNN memory footprint, compared to the baseline. Figure adapted from~\cite{putra2024snn4agents.
Real-Time Adaptation and Challenges
For reliable operation in dynamic settings, SNNs integrate noise filtering mechanisms and employ continual learning to update models with new knowledge incrementally.
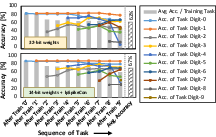
Figure 9: Accuracy of a 200-neuron SNN for the MNIST dataset, trained on different tasks, while also reducing the bitwidth. Figure adapted from~\cite{putra2022lpspikecon.
Despite these advances, the field faces challenges related to hardware scalability, security, and standardization. Efficient co-design and robust defense strategies remain significant areas for ongoing research.
Conclusion
The paper establishes a framework for deploying SNNs tailored for neuromorphic applications in autonomous systems. The combination of secure, energy-efficient design processes and real-time adaptability provides a strong foundation for future developments. As neuromorphic computing technologies mature, they hold promise for broader adoption in intelligent autonomous systems, necessitating continuous innovation in both algorithmic and hardware domains.