- The paper introduces GAKD, a genetic algorithm-based kinodynamic planning technique that navigates uneven terrains while balancing path length and traversability.
- It utilizes heuristic mutation in a genetic framework to optimize control inputs, achieving up to a 20% improvement in traversability costs.
- Real-world ROS integration and experiments on a 3D mesh validate the method's robustness for car-like vehicles on complex terrains.
A Genetic Approach to Gradient-Free Kinodynamic Planning in Uneven Terrains
Introduction
The paper presents a novel approach for kinodynamic motion planning in robotics, specifically addressing the challenges of navigating uneven terrains. Traditional kinodynamic planning involves both kinematic and dynamic constraints, such as those concerning velocity and force. The proposed method utilizes a Genetic Algorithm-based Kinodynamic planning (GAKD) technique that uniquely applies to car-like vehicles traversing terrains modeled as triangular meshes.
Methodology
Dynamic Modeling
The proposed method models car-like vehicle motion on a triangular mesh representation of uneven terrains. The dynamics are described in terms of the vehicle's position, orientation, and velocity, which are affected by control inputs—specifically, linear acceleration and steering angle. The state of the system evolves according to these inputs, ensuring the vehicle adheres to both dynamic and terrain constraints.
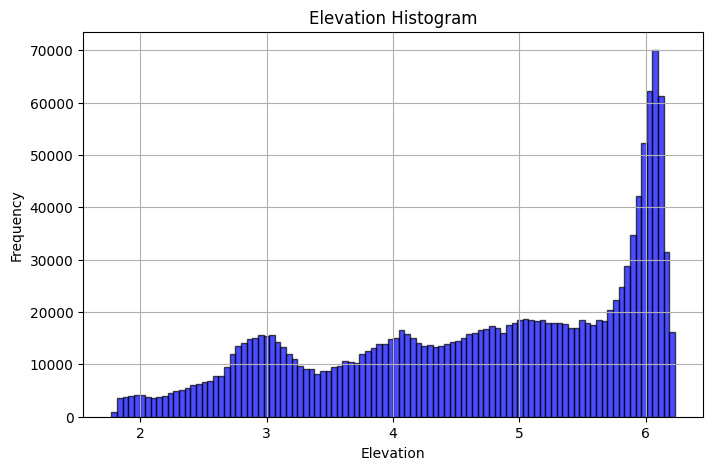
Figure 1: An elevation histogram of the mesh, shows the uneven distribution of height values across the surface.
Genetic Algorithm Framework
GAKD optimizes trajectories using a genetic algorithm with a focus on heuristic-based mutation to ensure the sequence of control inputs remains valid. Here's how GAKD operates:
- Initialization: Start with defining the vehicle's state and generating an initial population of control input sequences.
- Fitness Evaluation: Each sequence is evaluated based on a cost function that considers both path length and terrain traversability.
- Selection and Crossover: The best-performing control sequences are selected to produce offspring. Crossover operations combine parent sequences with an aim to retain advantageous traits.
- Mutation: Introduce random variations to offspring sequences to maintain diversity and explore the control space thoroughly.
- Convergence: Iteratively refine the population until a sequence with acceptable cost and vehicle stability is found.
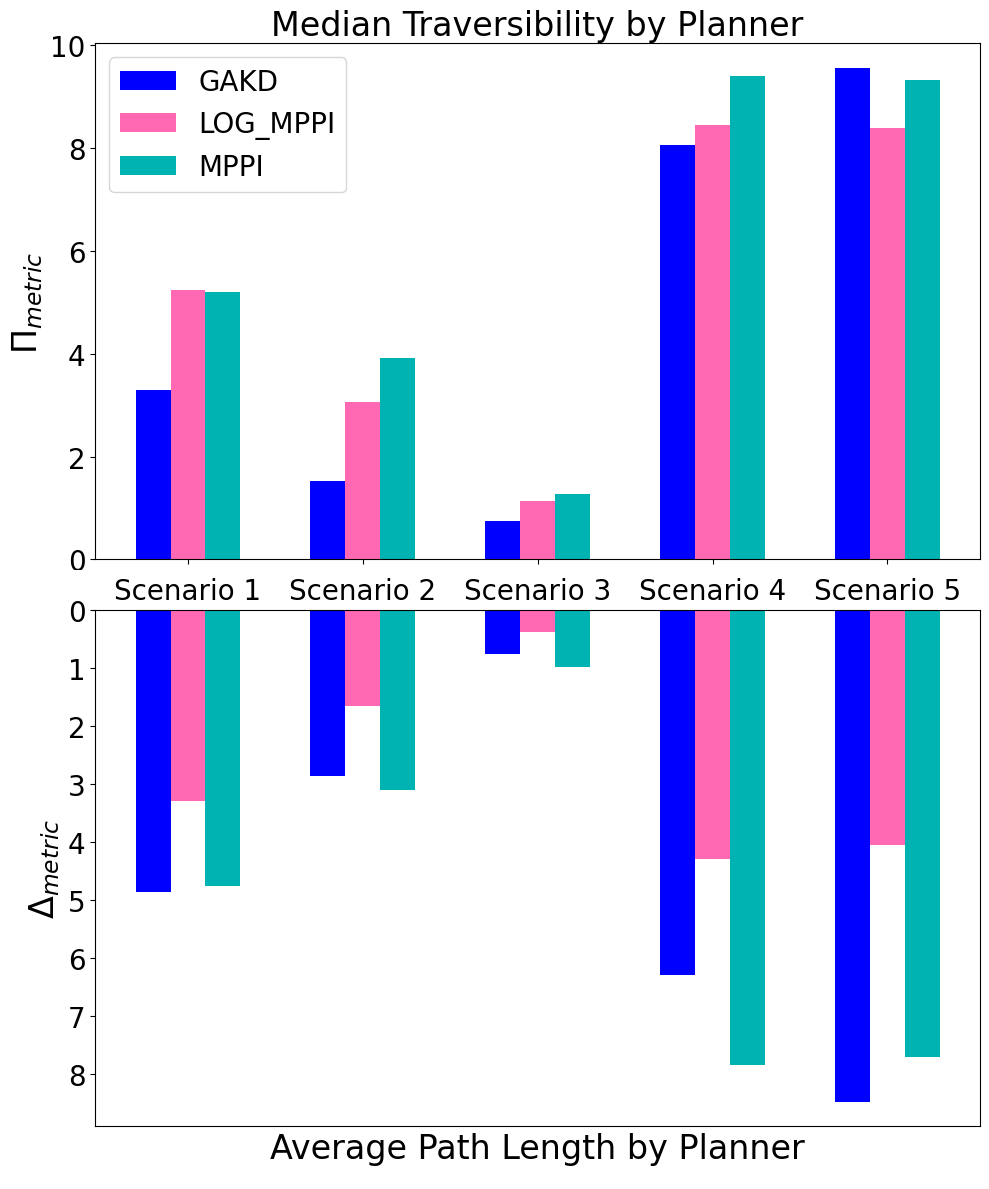
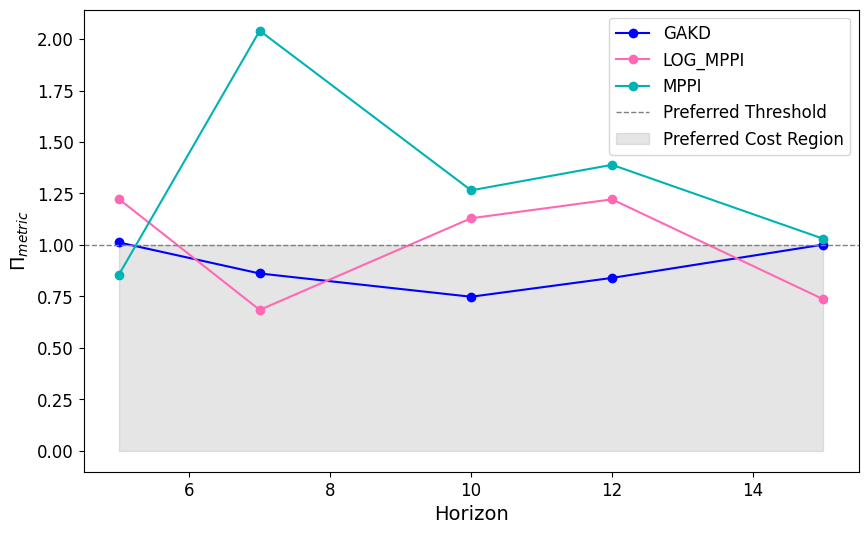
Figure 2: Comparison of algorithms based on path length and traversability cost across various scenarios. GAKD consistently outperforms both MPPI and log-MPPI in traversability cost, while log-MPPI achieves the shortest paths. GAKD demonstrates an effective balance between minimizing path length and maintaining low traversability costs.
Evaluation
Comparative Analysis
The performance of GAKD was benchmarked against MPPI and log-MPPI, two established gradient-free approaches. The evaluation used metrics such as traversability cost and path length across multiple scenarios, ensuring comprehensive coverage of potential terrain challenges.
Practical Implementation
A real-world demonstration was conducted using a robot navigating a reconstructed 3D mesh of an uneven outdoor environment. The integration with Robot Operating System (ROS) and deployment on actual hardware validate the algorithm's applicability and its robustness in real-time conditions.
Conclusion
GAKD advances kinodynamic planning by effectively combining genetic algorithms with heuristic-based mutation tailored for uneven terrains. The method demonstrates significant improvements in traversability costs, balancing the trade-offs between path length and terrain adaptability. Future developments may include integrating data-driven models for better dynamic constraints and leveraging parallel processing to enhance real-time applicability. The potential for adapting these methods in autonomous vehicle applications and complex environmental navigation is promising, suggesting pathways for further research and optimization.