- The paper introduces the ARMoD concept to enable expressive, human-readable cues in non-humanoid industrial robots.
- It integrates speech, gaze, gestures, and LLM feedback to create a natural and efficient multimodal communication framework.
- Empirical lab studies using metrics such as gaze-tracking and motion capture demonstrated faster task performance with multimodal strategies.
Multimodal Interaction and Intention Communication for Industrial Robots
Introduction
Industrial robots are progressively integrating into environments shared with humans, necessitating efficient and intuitive Human-Robot Interaction (HRI). This paper addresses the challenge by developing methods for multimodal interaction and intention communication in industrial robots. The focus lies on anthropomorphic interfaces, leveraging multimodal communication elements, and evaluating these systems through empirical research strategies. The research emphasizes the importance of adopting flexible and expressive cues like speech, gaze, and gestures to improve both communication efficacy and user task performance.
Anthropomorphic Communication Proxy
A central aspect of this research is the Anthropomorphic Robotic Mock Driver (ARMoD) concept, which acts as a communication proxy for non-humanoid robots, such as forklifts. This proxy enables the robot to utilize human-readable cues, addressing the intrinsic limitation of function-driven robotic designs which generally lack expressive capabilities. By employing ARMoD, diverse robotic platforms can standardize communication patterns.
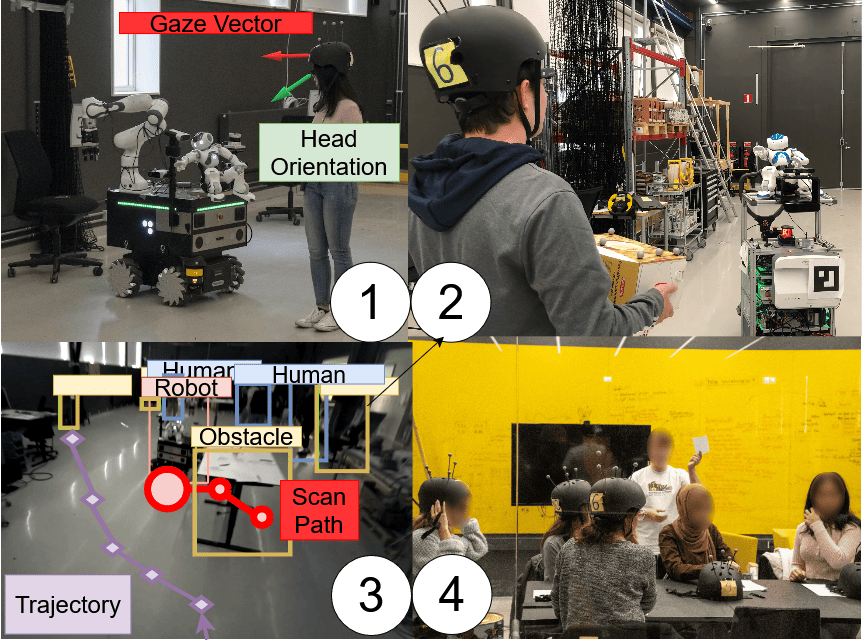
Figure 1: Focus points and methods in our HRI Studies: core elements include ARMoD, multimodal communication, gaze tracking, and methodical user studies.
Multimodal and LLM-enhanced Communication
Emphasizing multimodal interaction, the paper explores integrating LLMs and human-like gestures to refine the communicative aspect of robots. The multimodal framework is enriched with eye-tracking data to adapt robot behavior dynamically for task-related interactions. This approach intends to emulate natural human communication, thus speeding up interaction processes and increasing task accuracy. The ARMoD leverages these capabilities, allowing the industrial robot to provide contextual and adaptable responses in real-time.
Evaluation Methods
The evaluation of the proposed HRI systems was conducted through controlled laboratory settings, enabling precise measurement of interaction dynamics. These lab-based studies provided an ideal environment for rigorously testing both scripted and spontaneous user interactions with robots. Key metrics included the analysis of task engagement via gaze-tracking technology and motion capture data, which provided profound insights into human perception and robot effectiveness.
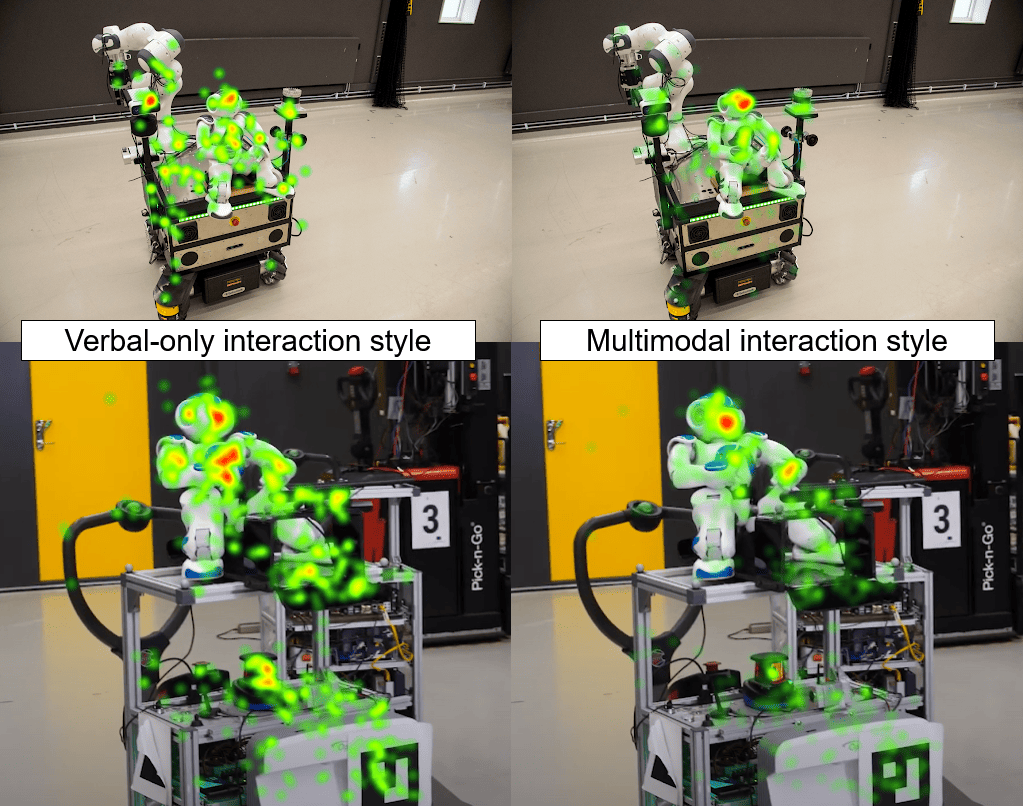
Figure 2: Heatmaps show participant gaze distribution, with concentrated focus on ARMoD during multimodal engagements.
Results and Discussion
Analyses revealed that employing a multimodal communication strategy significantly enhances task performance. Specifically, users demonstrated faster response times in locating objects and understanding task goals when ARMoD and multimodal cues were in use. Interestingly, although LLM-enhanced responses provided nuanced adaptability, no substantial improvement in task efficiency was observed compared to fully scripted interactions, indicating the need for further exploration in this domain.
Conclusion
The findings underscore the potential of multimodal communication strategies for improving HRI in industrial settings. The anthropomorphic proxy concept, combined with multimodal and LLM-enabled frameworks, offers a promising pathway for designing robots capable of seamless and intuitive interactions with humans. Future research may extend these methodologies across various applications, including sectors like elderly care, where natural HRI can significantly elevate user experience.