- The paper introduces a consensus-based control strategy that incorporates delay corrections to maintain longitudinal vehicle dynamics in CAVs.
- It employs multiple algorithms, including the Intelligent Driver Model, for speed prediction and position estimation, achieving errors ≤0.5 m under packet loss scenarios.
- Simulation results in a Unity-modeled city district validate the method’s robustness and practical applicability amidst randomized communication disruptions.
Motion Estimation for CAVs under V2X Communication Challenges
The paper "Motion Estimation of Connected and Automated Vehicles under Communication Delay and Packet Loss of V2X Communications" addresses an important issue in vehicular networks. It develops a methodology to mitigate the effects of communication delays and packet losses on CAVs, which are critical for real-time coordination in V2X environments.
Introduction
In the CAV ecosystem, real-time communication among vehicles is crucial for applications like Cooperative Adaptive Cruise Control (CACC) and automated intersection management. Technologies such as DSRC and C-V2X provide the necessary communication framework but introduce challenges like delays and packet loss, which can adversely affect vehicle coordination. This study proposes a consensus-based motion estimation methodology to address these challenges.
Methodology
Consensus-Based Motion Control
The paper utilizes a consensus-based longitudinal motion control strategy designed to maintain dynamics consensus amongst CAVs despite delays. A motion control algorithm determines the vehicle's longitudinal control by considering both real-time dynamics and the dynamic information from neighboring vehicles. The control algorithm incorporates feedback mechanisms that account for timed communication delays and ensure system stability:
v˙i(t)=−αijkij[(ri(t)−rj(t−τij)+h)+γi(vi(t)−vj(t−τij))]
Motion Estimation
The motion estimation methodology employs a prediction mechanism to estimate vehicle states during communication dropouts. It consists of:
- Algorithm 1: The primary function for motion estimation, employing sub-algorithms to handle scenarios where communication with lead vehicles is affected.
- Algorithm 2: Predicts future vehicle speed using the Intelligent Driver Model (IDM) during disconnects.
- Algorithm 3: Estimates longitudinal position based on predicted speed.
- Algorithm 4: Adjusts motions considering detected communication delays using extrapolated dynamics information.
(Figure 1)
Figure 1: The illustration of vehicle parameters in a V2X communication environment with an ego vehicle i and its target vehicle j.
Simulations and Results
Simulation Environment
The simulation runs within a Unity-based environment, modeling a real-world city district to evaluate the system under realistic conditions. It incorporates randomized communication disruptions to stress-test the proposed algorithms.
(Figure 2)
Figure 2: The map with a four-intersection (each with four legs) corridor built in Unity game engine based on the SoMa district in San Francisco.
Motion Estimation Evaluation
The methodology's efficacy is validated through simulations at unsignalized intersections with varying packet loss and delay conditions. The estimation errors remain minimal (≤0.5 m), even with significant packet disruption scenarios.
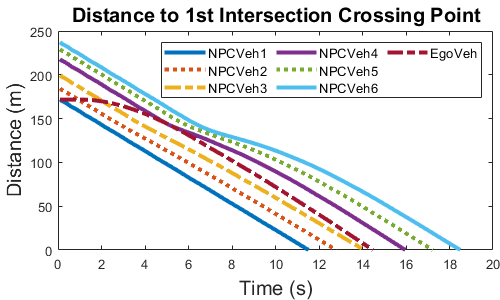
Figure 3: Longitudinal position trajectory of vehicles crossing the first intersection (2nd-Harrison intersection), where the ego vehicle (dark red dashed curve) has communication delay and packet loss.

Figure 4: Error of the ego vehicle's position estimation with different prediction time step values compared to the ground truth.
Conclusion
The proposed motion estimation framework demonstrates robust performance in handling communication challenges prevalent in V2X systems, providing accurate vehicle positioning and control adjustments despite adverse conditions. Future work aims at real-world implementation and integration with advanced sensor systems for enhanced reliability and lower estimation errors.
This study represents a significant advancement for ensuring operational reliability of CAVs in interconnected transport environments, offering pathways for scalable deployment in various real-world scenarios.