- The paper introduces a grid-based SMPC framework that converts probabilistic chance constraints into deterministic ones via a binary grid transformation.
- It employs convex hull techniques to simplify the optimization process, enabling efficient real-time trajectory planning even during complex maneuvers like overtaking.
- Simulation results validate the approach's scalability and computational efficiency, ensuring robust collision-free navigation in dynamic environments.
Grid-Based Stochastic Model Predictive Control for Trajectory Planning in Uncertain Environments
Introduction
The paper discusses the implementation and application of a grid-based Stochastic Model Predictive Control (SMPC) approach for trajectory planning within uncertain environments, particularly focused on autonomous driving scenarios. The approach innovatively utilizes a probabilistic grid to address the computational challenges associated with chance constraints intrinsic to SMPC, thereby allowing efficient trajectory planning that accounts for stochastic vehicle behavior.
Methodology
Probabilistic Occupancy Grid
The environment is discretized into a grid where each cell is assigned an occupancy probability, representing the likelihood of that cell being occupied by a surrounding vehicle at any future prediction step. This probabilistic occupancy grid, or probabilistic grid, is critical for defining the space constraints of the ego vehicle (EV). Unlike traditional methods that rely on Gaussian assumptions for simplicity, this method supports arbitrary probability distributions, thereby enhancing flexibility in various driving contexts.
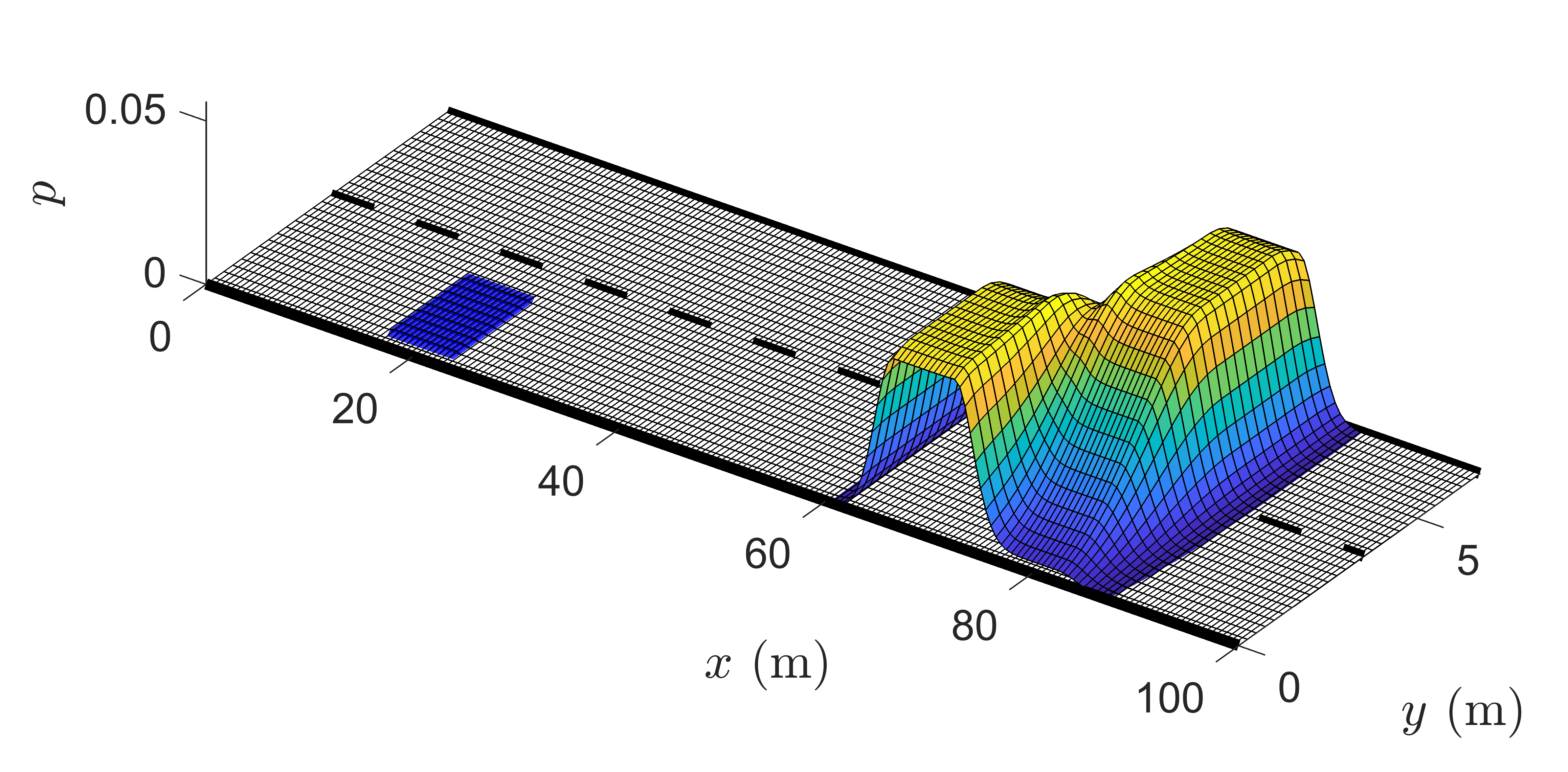
Figure 1: Probabilistic Grid of a prediction step. The EV is on the left in blue and multiple TVs are displayed on the right.
To reformulate the probabilistic chance constraints into deterministic constraints feasible within an optimization framework, the probabilistic grid is converted into a binary grid. This transformation is achieved by imposing a threshold on the occupancy probabilities, thus distinguishing admissible regions from inadmissible ones for EV navigation. The result is a binary matrix that enables efficient constraint definition in a convex optimization problem.
Convex Hull and Optimization Problem
The admissible areas derived from the binary grid are used to create a convex hull, which further describes the constraints in linear inequality form, suitable for inclusion within an optimization problem. This convex representation simplifies the constraint handling within the model predictive control framework. Moreover, the optimization problem is solved iteratively to determine the optimal control inputs for the EV, achieving safe and efficient trajectory planning even in dynamically changing traffic scenarios.
Simulation Results
Overtaking Scenario
The paper presents a simulation where the SMPC method is applied to an overtaking maneuver on a highway scenario involving multiple target vehicles (TVs). The simulation effectively demonstrates the method’s capacity to ensure collision-free navigation by the EV, which adapts by executing lane changes and overtakes based on the probabilistic assessments of the surrounding TVs’ trajectories.
Computational Efficiency
The method's computational efficiency is also validated through tests with varying numbers of target vehicles, showing that the grid-based SMPC approach maintains consistent computational demands irrespective of the number of TVs considered. This is pivotal for real-time applications where computational resources are a constraint.
Discussion and Future Implications
The presented grid-based approach effectively reduces the conservatism associated with traditional robust planning methods while maintaining safe navigation through probabilistic assessments. A significant implication of this research is its scalability; the method can accommodate increases in the number of dynamic obstacles without significant computational overhead, a factor crucial for urban autonomous driving scenarios. Furthermore, future work might investigate the integration of this method with more complex 3D environments or the development of adaptive mechanisms for threshold determination to enhance robustness across varied operating conditions.
Conclusion
The grid-based SMPC methodology offers a practical and computationally efficient solution for trajectory planning in uncertain environments, with direct applications in autonomous driving. It enables the incorporation of complex probability distributions within a manageable optimization framework, facilitating safer and more reliable autonomous system operation amidst the challenges posed by dynamic and uncertain real-world conditions. The method’s scalability and adaptability suggest promising applications beyond current use cases, potentially extending into robotics and other domains requiring sophisticated trajectory planning capabilities.