- The paper presents a simulation-based study on heterogeneous CACC systems, highlighting the benefits of mixing different platoon controllers for improved traffic flow.
- It employs various algorithms like Ploeg, PATH, and GSBL to analyze vehicle interactions and safety margins in both isolated and ring-road traffic scenarios.
- Findings suggest that dynamic leader election and advanced control strategies can significantly boost throughput and road safety in mixed vehicle platoons.
Understanding Heterogeneous CACC Coexistence
The paper "Heterogeneous CACC Coexistence: Simulation, Analysis, and Modeling" explores the coexistence of vehicles equipped with different Cooperative Adaptive Cruise Control (CACC) systems within platoons, providing insights into the implications on safety, efficiency, and future research directions.
Introduction
CACC systems have garnered substantial interest as they promise enhanced road safety and traffic efficiency. Traditional studies predominantly focus on homogeneous vehicle groups, where each car operates under identical CACC algorithms. However, with increasing market diversity, the real-world scenario is shifting towards heterogeneous platoons. This paper seeks to address the challenges of mixed platoons comprising vehicles with distinct CACC implementations, assessing their performance through simulation and examining the implications on practical road usage.
Methodology
The authors adopt a simulation-based approach using a variety of established CACC algorithms, including Ploeg, PATH, and GSBL controllers. These represent different strategies for platooning, ranging from constant time headway to robust communication-driven approaches. The research examines isolated platoon formations and broader traffic scenarios on ring-road configurations, evaluating both microscopic safety aspects in emergency braking situations and macroscopic traffic flow impacts.
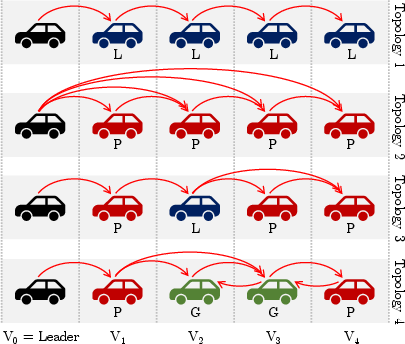
Figure 1: Examples of control topology in platoons of five vehicles: Topology 1 {−,,,,}; Topology 2 {−,,,,}; Topology 3 {−,,,,}; Topology 4 {−,,,,}.
One notable innovation is the introduction of mechanisms for dynamically electing ego leaders within mixed platoons, allowing vehicles to optimize their cooperation based on control algorithm similarities.
Results
The results indicate that heterogeneous platoons can function effectively, provided careful design consideration is given to control topology and algorithm interaction. Specifically, mixing CACC controllers improves traffic flow efficiency compared to autonomous ACC vehicles alone. The introduction of cooperative platooning elevates throughput notably, with mixed configurations displaying promising road utilization outcomes.
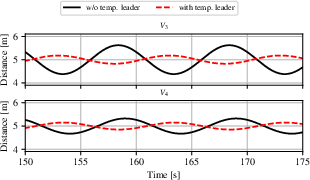
Figure 2: Comparison of the inter-vehicle distance dynamics for V3 and V4 in Topology 3 under \ac{CACC}.
However, the GSBL controller poses challenges due to its distinctive control mechanisms, sometimes leading to lower safety margins or reduced comfort during complex maneuvers. This suggests that although heterogeneity enriches functional robustness, it necessitates advanced control strategies to mitigate potential safety concerns, especially in high-density conditions.
Implications and Future Directions
Despite achieving favorable results in simulations, the study underscores the necessity for more robust theoretical frameworks to understand and model heterogeneous platoon dynamics effectively. Emphasizing this need, a matrix-based connectivity approach is proposed, aiming to pave the way for more formal analyses that could better inform the design of future CACC-equipped vehicles.
The implications for industry involve rethinking communication protocols and standards, possibly integrating CACC-capable identifications in awareness messages, thus facilitating more dynamic and safe platooning operations at scale.
Conclusion
The coexistence of diverse CACC systems within vehicle platoons offers substantial improvements to roadway efficiency and safety, albeit with complexities in controller interaction requiring careful management. This paper contributes essential foundational insights and suggests pathways for future research to tackle the challenges associated with integrating heterogeneous control systems into mainstream traffic ecosystems. As autonomous and cooperative driving technologies evolve, strategic advancements in these areas will be crucial for achieving seamless, efficient road transport solutions globally.