- The paper introduces the GMPPI controller that integrates geometric SE(3) control with depth camera data to enhance UAV agility and collision avoidance.
- It employs dynamic rollout time steps and a hybrid cost model to optimize trajectory tracking and maneuver precision in complex environments.
- Experimental results show a 31% reduction in position RMSE and 100% success in simulated obstacle avoidance compared to conventional methods.
Geometric Model Predictive Path Integral for Agile UAV Control with Online Collision Avoidance
Introduction
The paper "Geometric Model Predictive Path Integral for Agile UAV Control with Online Collision Avoidance" introduces the Geometric Model Predictive Path Integral (GMPPI) controller, a novel advancement in unmanned aerial vehicle (UAV) maneuverability and safety. Aimed at enhancing trajectory tracking and collision avoidance in complex environments, GMPPI leverages geometric SE(3) control and depth cameras to outperform traditional Model Predictive Path Integral (MPPI) implementations. The paper details a solution to the fast-paced navigation challenges faced by UAVs in environments such as search and rescue or infrastructure inspection. It addresses key limitations of conventional modular navigation systems and proposes a seamless integration of perception and control mechanisms.
Methodology
The proposed GMPPI controller integrates multiple innovations. It blends traditional MPPI with geometric SE(3) control to enhance precision, agility, and obstacle avoidance. The approach employs a large number of candidate rollout trajectories each iteration, of which some are generated using geometric SE(3) controllers to increase precision. The controller adjusts rollout simulation parameters dynamically, optimizing tracking performance. Moreover, GMPPI utilizes stereo depth cameras for real-time, high-speed obstacle avoidance, projecting trajectories onto live depth images to ensure a seamless online collision avoidance mechanism.
Depth Camera Integration
The integration of depth cameras into the MPPI framework for agile UAV navigation is pivotal. GMPPI uses rollout states projected onto the latest available depth image to directly assess collision risks, minimizing sensor-to-control delay, imperative for high-speed maneuvering. This method allows the controller to simulate potential future states of the UAV against live sensor data, enabling precise real-time adjustments to navigation strategies.
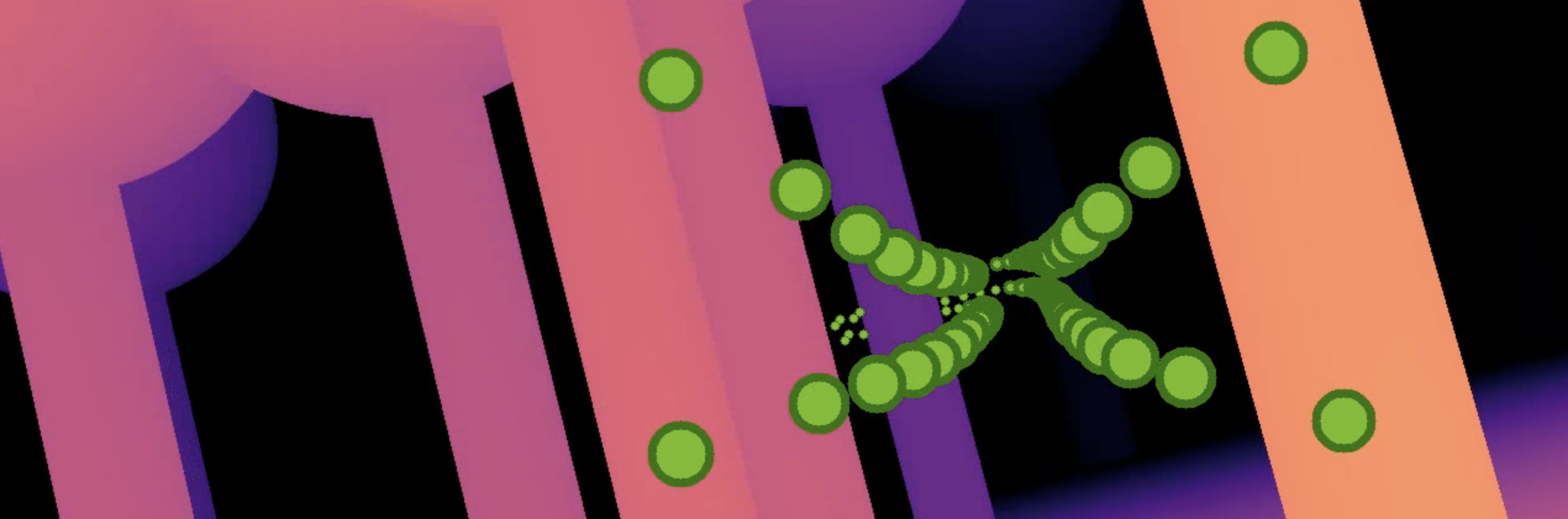
Figure 1: Depth-camera image with the projection of the front four corners of the UAV.
Rollout Generation and Dynamic Time Steps
The system employs dynamic rollout time steps to fully utilize sensor ranges under varying speeds, crucial for ensuring maneuver accuracy amidst computational constraints. GMPPI uses a combination of random and geometric rollouts, optimizing exploration and precision based on real-time environmental feedback. Variable-length time steps are leveraged, dynamically adjusted relative to the UAV speed and sensor range, maximizing the efficacy of available computational resources.
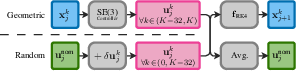
Figure 2: Combination of geometric and random rollouts. A total of K rollout sequences are simulated, of which K - 32 are random and 32 use geometric control.
Cost Function and Obstacle Avoidance
The GMPPI cost model incorporates several control aspects—precise trajectory tracking, flight smoothness, and obstacle avoidance. Costs are computed for position, velocity errors, and smoothness, while emphasizing the avoidance of possible collisions through depth data integration. This multipronged approach ensures that the UAV follows intended trajectories without sacrificing the ability to avoid unforeseen obstacles effectively.
Results
The experimental results demonstrate GMPPI's superiority over existing frameworks in both simulated and real-world scenarios. In agile trajectory tracking, GMPPI achieved a 31% reduction in position RMSE over conventional MPPI and performed comparably to the SE(3) controller. Obstacle avoidance trials in simulated Poisson forests showed that GMPPI surpassed the performance of state-of-the-art learning-based systems and planners, maintaining 100% success up to specific thresholds.


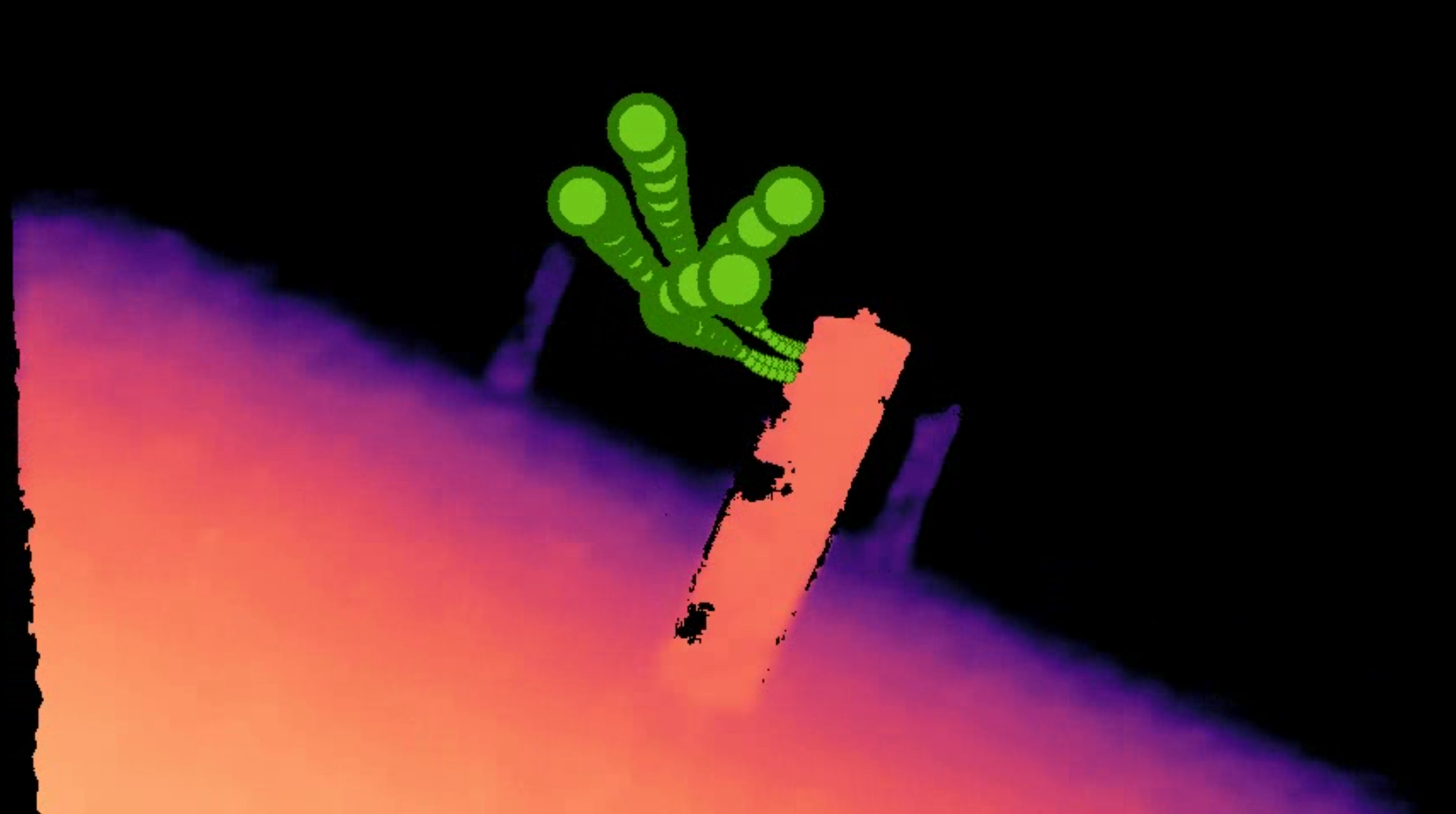
Figure 3: Visualization of the real-world experiment verifying the obstacle avoidance capability of the proposed controller.
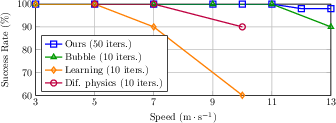
Figure 4: Graph of success rates for different controllers in the Poisson forest. Bubble results are from previous work.
Conclusion
The incorporation of geometric control into MPPI facilitates a robust UAV control method that effectively balances agility with obstacle avoidance. GMPPI sets a new benchmark for UAV control in cluttered environments, proving competence in both academic experiments and practical missions. The seamless integration of real-time depth imaging into the MPC framework illustrates a step forward in the development of versatile UAV systems capable of navigating complex environments at high speed and with high precision. Future developments might explore further optimization of the dual-use of learning models in conjunction with GMPPI to enhance adaptability and robustness in unexplored environments.