- The paper presents a modular PANORAMA system architecture that integrates distortion-aware CNNs and Transformers to process panoramic data.
- It details advanced methods in panoramic image generation and perception, including diffusion models, domain adaptation, and dynamic label updating for improved spatial fidelity.
- Findings emphasize that large-scale, multi-task pretraining and unified omnidirectional models are crucial for robust, real-world embodied AI applications.
PANORAMA: The Rise of Omnidirectional Vision in the Embodied AI Era
Introduction and Motivation
The paper addresses the increasing significance of omnidirectional (360°) vision in the context of embodied AI, emphasizing its superiority over traditional pinhole vision for tasks requiring holistic environmental awareness. The authors identify three primary challenges impeding progress: data bottlenecks, model capabilities, and application blanks. Panoramic images, typically acquired via equirectangular projection, suffer from geometric distortions and high annotation costs, limiting the availability of large-scale, high-quality datasets. Existing models, predominantly designed for pinhole images, fail to generalize to panoramic data due to their inductive biases and inability to handle projection-induced distortions. Furthermore, the lack of interdisciplinary expertise and scenario-specific resources has resulted in insufficient exploration of application domains such as industrial inspection and environmental monitoring.
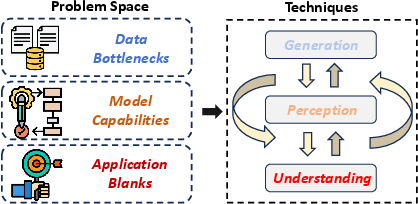
Figure 1: Challenges and technical bottlenecks in 360° vision, including data, model, and application gaps.
Technical Advances in Omnidirectional Vision
Generation
Early omnidirectional generation methods leveraged GANs for panorama outpainting and refinement, with Dream360 employing a two-stage codebook and frequency-aware approach. The field has shifted towards diffusion models, which offer improved sample quality and controllability. PanoDiffusion introduces a two-branch architecture for RGB-D input, enhancing spatial fidelity, while OmniDrag enables trajectory-based control for user-guided generation. These advances address the unique geometric and semantic requirements of panoramic imagery, but strong claims regarding generalization across domains remain unsubstantiated due to limited cross-dataset evaluation.
Perception
Domain adaptation is central to panoramic perception, with adversarial, pseudo-label, and prototype-based strategies mitigating the lack of labeled panoramic data. GoodSAM and GoodSAM++ utilize SAM for reliable pseudo-label generation, while OmniSAM introduces dynamic label updating. Prototype alignment, as in 360SFUDA++ and OmniSAM, matches high-level features across domains, yielding notable improvements in segmentation accuracy. However, the transferability of these methods to real-world, multi-modal scenarios is still constrained by dataset diversity and annotation quality.
Understanding
Multimodal LLMs trained on pinhole images exhibit poor performance on panoramic data. Recent efforts focus on constructing omnidirectional reasoning datasets (e.g., OSR-Bench, OmniVQA) and developing GRPO-based methods for spatial reasoning. ERP-RoPE explores internal panoramic features to enhance model understanding. Despite these advances, the lack of large-scale, multi-modal pretraining resources and projection-consistent benchmarks limits progress in embodied spatial reasoning.
PANORAMA System Architecture
The authors propose the PANORAMA system, a modular architecture comprising four subsystems: Data Acquisition & Pre-processing, Perception, Application, and Acceleration & Employment. The pipeline begins with synchronized multi-sensor data capture and format conversion, followed by distortion-aware feature extraction using spherical CNNs and Transformers. Perceptual outputs feed into downstream embodied tasks such as navigation, SLAM, and digital twin construction. The final subsystem optimizes computational efficiency via quantization, pruning, and deployment on edge hardware (e.g., NVIDIA Jetson, SOPHGO SE9).
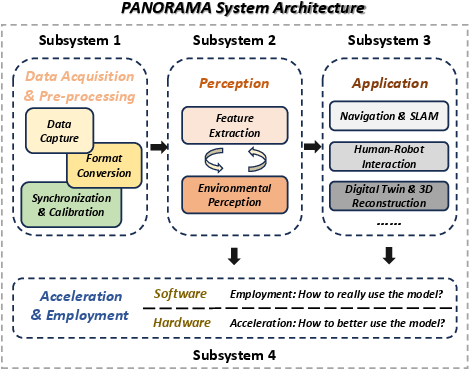
Figure 2: Overview of the PANORAMA system architecture, illustrating the integrated pipeline from data acquisition to deployment.
Roadmap for Unified Omnidirectional Embodied AI
The paper delineates a six-stage roadmap for developing unified omnidirectional models:
- Dataset Integration: Harmonization of existing datasets, standardized projections, and annotation protocols.
- Multi-Modal Expansion: Fusion of RGB, depth, LiDAR, audio, and IMU data, leveraging hybrid real-synthetic pipelines.
- Reasoning and Embodied Data: Construction of reasoning-augmented datasets for VQA, navigation, and grasping, with simulation environments for dynamic scenario generation.
- Unified Model Pretraining: Multi-task encoders trained on panoramic geometry and semantics, incorporating cross-projection and domain-mixing curricula.
- Evaluation and Benchmarking: Rigorous, projection-consistent metrics and OOD splits for reproducible comparison.
- Deployment and Generalization: Stress-testing models under real-world conditions, continual learning, and uncertainty calibration.
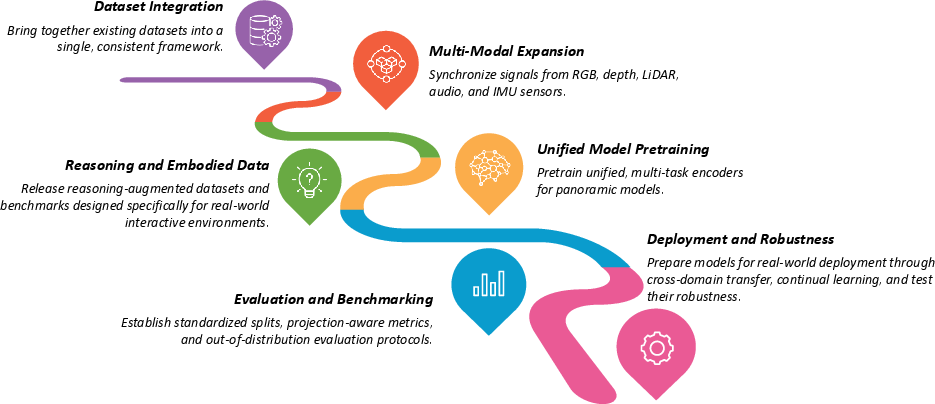
Figure 3: Roadmap for implementing unified omnidirectional models in embodied AI, spanning dataset integration to deployment.
Cross-Community Impacts and Open Challenges
Omnidirectional vision is positioned as a foundational technology for robotics, autonomous navigation, human-robot interaction, and cognitive AI. It enables complete situational awareness, robust spatial reasoning, and natural interaction by providing dense, egocentric perceptual streams. However, several open challenges persist:
- Generalization and Robustness: Existing models are scenario- and projection-specific; projection-agnostic and self-supervised approaches are needed for invariant feature learning.
- Dynamic Distortion Handling: Current methods treat distortion statically; future research must address temporal consistency in panoramic video.
- Action-Aware Representation Learning: Models should learn action-oriented representations to enhance embodied decision-making.
- Scalable and Unified Architectures: The field lacks multi-task foundation models pre-trained on extensive panoramic data, limiting rapid specialization and generalization.
The authors advocate for large-scale, multi-task dataset creation, novel omnidirectional architectures, and real-world application demonstrations to bridge the gap between research and deployment.
Conclusion
This paper provides a comprehensive synthesis of the state-of-the-art in omnidirectional vision for embodied AI, identifying critical challenges and proposing a modular system architecture and staged roadmap for future development. The integration of panoramic vision with embodied intelligence promises substantial cross-community impact, but progress is contingent on addressing data, model, and application bottlenecks. The transition to unified, scalable, and action-aware omnidirectional models will be pivotal for advancing embodied AI towards robust, general-purpose agents capable of holistic environmental understanding and interaction.

