- The paper introduces a novel LQR-based control approach that regulates CAV platoon speeds to effectively reduce congestion at bottlenecks.
- It models traffic dynamics using the LWR framework and CTM, demonstrating that LQR controllers outperform traditional PI and MPC methods in simulations.
- Microsimulation results show that both GN-LQR and GN-LQRP controllers enhance mean traffic speeds and computational efficiency, supporting practical real-time applications.
CAV Traffic Control to Mitigate Congestion Using LQR Approach
Introduction
The paper "CAV Traffic Control to Mitigate the Impact of Congestion from Bottlenecks: A Linear Quadratic Regulator Approach and Microsimulation Study" (2306.10418) presents an investigation into traffic control using Connected and Autonomous Vehicles (CAVs) to mitigate congestion caused by bottlenecks. It proposes a novel control methodology based on Linear Quadratic Regulator (LQR) theory to manage CAV platoons acting as moving bottlenecks, assessing their impact on traffic flow and evaluating their performance through both macroscopic and microscopic simulations.
Traffic Dynamics Model
The study models traffic dynamics using the first-order Lighthill-Whitham-Richards (LWR) traffic flow model utilizing a Cell Transmission Model (CTM) framework. This model accounts for a capacity drop phenomenon, wherein the decrease in traffic flow capacity occurs at high densities, notably at bottlenecks. This setting allows for a realistic simulation environment for evaluating the impact of CAV platoons on traffic flow.
LQR-Based Control Methodology
The authors propose an LQR-based control strategy, which operates by regulating CAV speeds to minimize traffic congestion. The approach utilizes a Gauss-Newton LQR (GN-LQR) algorithm to solve the optimization problem of controlling the CAV platoons' speeds. This method also introduces a variant, GN-LQRP, which penalizes abrupt changes in speeds to provide smoother control.
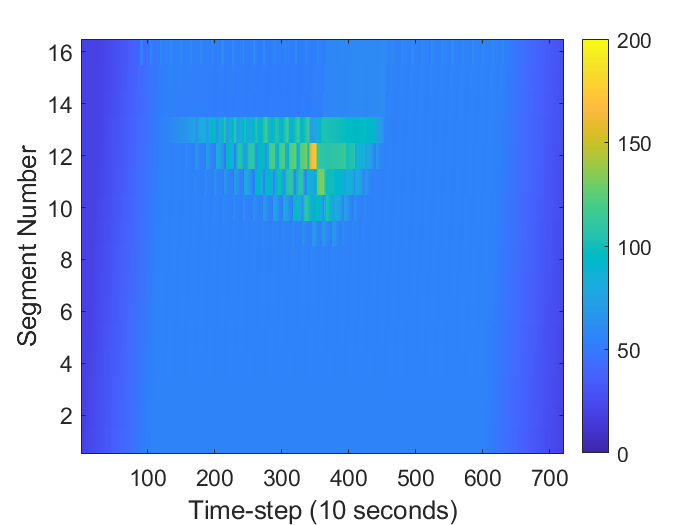
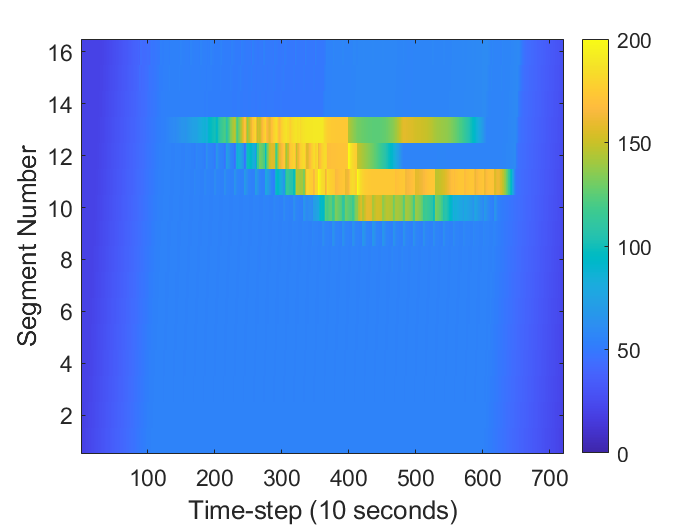
Figure 1: Density (veh/km) evolution on the highway stretch with [left] GN-LQR and [right] GN-LQRP controllers default parameters.
Comparative Analysis with Existing Control Methods
The LQR-based controllers are benchmarked against traditional Proportional-Integral (PI) and Model Predictive Control (MPC) methods. The PI controller, although computationally efficient, fails to ensure optimal control, whereas the MPC controller, while optimal, is computationally intensive due to its iterative optimization process. The LQR-based approach is shown to provide a balance between optimal control performance and computational efficiency. In particular, GN-LQR and GN-LQRP outperform MPC in terms of computation times and offer comparable performance improvements in traffic conditions.
Microsimulation Study
The study extends its evaluation to a microscopic traffic setting using the TransModeler software. The results demonstrate that both GN-LQR and GN-LQRP improve the Mean Speed (MS) by effectively reducing congestion. GN-LQRP, tested across various horizon lengths, provides insights into optimal tuning for realistic traffic conditions, suggesting that penalties on speed variations can significantly enhance the practicality of control methods in real-world applications.
Implications and Future Directions
The research suggests that LQR-based controllers offer a promising solution for real-time traffic management using CAVs, with implications for both the design of intelligent transportation systems and the development of robust control algorithms. Future work could focus on extending these methodologies to account for uncertainty in traffic dynamics and to investigate their efficacy across larger and more complex networks.
Conclusion
The study concludes that LQR-based controllers effectively mitigate the impact of bottlenecks in highway traffic, balancing computational efficiency and performance. These findings support the advancement of CAV technologies and their integration into modern traffic control systems, highlighting the potential for LQR-based strategies to enhance congestion management and improve traffic flow on congested roadways.

