- The paper presents a novel fuzzy PID controller that dynamically adjusts parameters for improved DC motor speed control.
- Simulation and practical experiments demonstrate enhanced setpoint tracking, reduced overshoot, and faster response times.
- The integration of fuzzy logic with traditional PID techniques offers a robust method for real-time control optimization.
Speed Control of DC Motor Using Fuzzy PID Controller
This paper presents a methodology for enhancing DC motor speed control through the integration of a Fuzzy PID Controller. The implementation combines traditional PID controllers with fuzzy logic systems to enhance system performance by improving setpoint tracking, reducing overshoot, and optimizing rise and settling times.
Introduction
PID controllers are ubiquitous in industrial applications due to their simplicity and effectiveness for a wide range of control systems. However, tuning these controllers for optimal performance, particularly in systems with underdamped responses, presents challenges. The paper proposes a fuzzy logic-based method for dynamically adjusting PID parameters (KP, KI, KD) to improve the control quality for DC motors. This approach leverages operator experience translated into fuzzy logic rules, allowing for intuitive parameter tuning that can adjust in real-time based on system behavior.
Modeling and Simulation
DC Motor Modeling
The DC motor is modeled using an electrical equivalent that consists of a voltage generator in series with an inductance and a resistor. The induced voltage, known as the electromotive force (EMF), opposes the applied voltage. The torque generated by the motor is directly proportional to the armature current, described by:
T=Kt×i
where Kt is the torque constant. Similarly, the EMF is proportional to the shaft's angular velocity:
e=Kb×θ
Combining Newton's and Kirchhoff's laws, the system transfer function relates rotational speed output to armature voltage input, providing a basis for the control design.
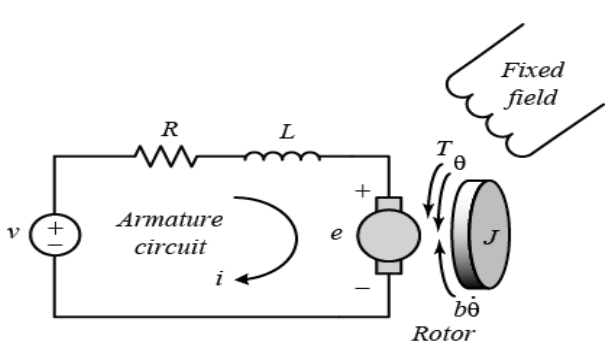
Figure 1: Representation of a DC motor.
PID Controller
Traditional PID tuning through manual methods is described, aiming to achieve oscillation-free control with optimal rise and settling times. The resulting gains, KP, KI, and KD, tune the controller for a balance between response speed and stability without overshooting.
Fuzzy PID Controller
The fuzzy logic controller (FLC) provides a rule-based framework for PID parameter adjustment. The FLC inputs include the speed error and its derivative, outputting adjusted gains for the conventional PID controller. Membership functions, rules, and consequent actions govern the control strategy, leveraging linguistic variables based on expert knowledge.
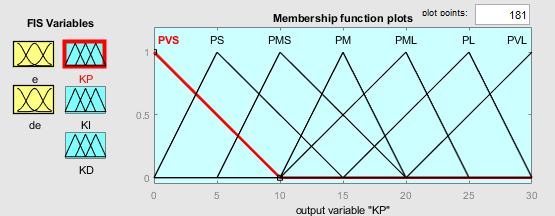
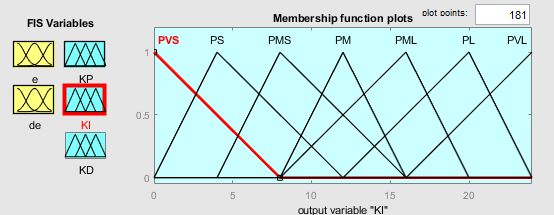
Figure 2: Membership function of the gain Kp.
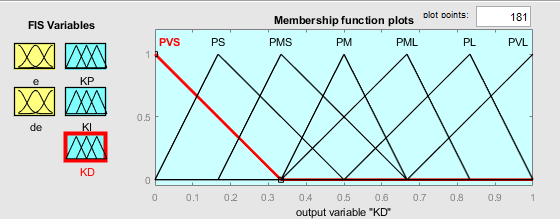
Figure 3: Membership function of the gain Kd.
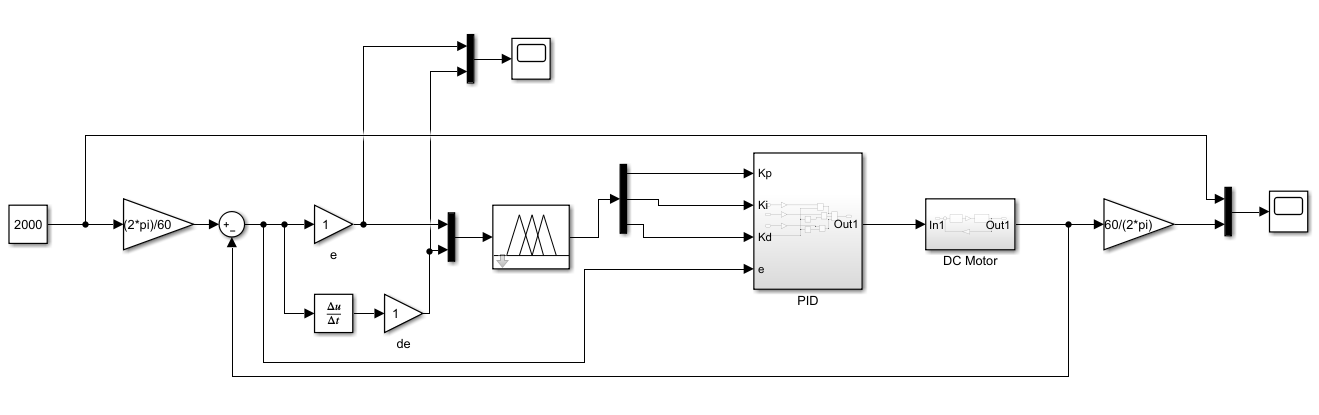
Figure 4: Simulink diagram of the DC motor in series with a Fuzzy PID Controller.
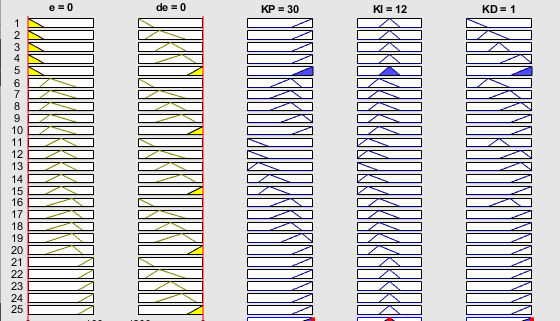
Figure 5: The Fuzzy PID rule viewer.
Simulation Results
Simulation results demonstrate the superior performance of the Fuzzy PID controller over traditional PID methods. The fuzzy system achieves precise speed tracking with minimal rise times, settling times, and zero overshoot. When compared to a system without a controller or with a conventional PID, the Fuzzy PID system offers a robust improvement.
Practical Experiment
The theoretical framework was validated through practical experimentation using an Arduino-based setup. While theoretical predictions were generally confirmed, transient overshoot occurred due to initial current surges, indicating areas for further refinement in practical applications.
Conclusion
The study effectively combines PID precision with fuzzy logic flexibility, enhancing the dynamic response and reducing steady-state errors in DC motor control. Future prospects include refining the approach for more sophisticated systems, potentially incorporating adaptive algorithms or hybrid control methodologies.
Overall, this research exemplifies the practical application of fuzzy logic in control systems, offering a significant enhancement over traditional PID methods. As technology advances, such integrated approaches could become standard in complex industrial applications requiring robust, adaptable control systems.

