- The paper presents a comprehensive review of AIM, outlining a hierarchical control structure that transitions from traditional signalized to individualized vehicle coordination.
- It evaluates four distinct reservation systems and various priority policies, revealing trade-offs between computational feasibility and intersection throughput.
- The study identifies challenges in real-time control, mixed-traffic integration, and decentralized architectures as key areas for future research.
Autonomous and Semi-Autonomous Intersection Management: A Survey – Expert Analysis
This paper delivers an exhaustive technical review of Autonomous Intersection Management (AIM) systems, providing a multi-layered perspective that traverses traffic engineering, control theory, and systems implementation. AIM is positioned as an evolution beyond traditional Signalized Intersection Management (SIM), aiming to leverage Connected and Automated Vehicles (CAVs) for efficient, individualized vehicle coordination and trajectory planning at intersections. This essay details the foundational frameworks, algorithmic strategies, evaluation paradigms, and open research directions delineated in the survey.
Intersection Conflict Geometry and Layered Control Framework
Intersections are high-risk, high-delay nodes within transportation networks; 36% of US crashes are intersection-related. The core engineering challenge is the safe separation of vehicle conflict points—physical locations where trajectories intersect and collision risk peaks. The paper codifies a hierarchical management structure comprising corridor coordination, intersection (trajectory) planning, and vehicle control layers.
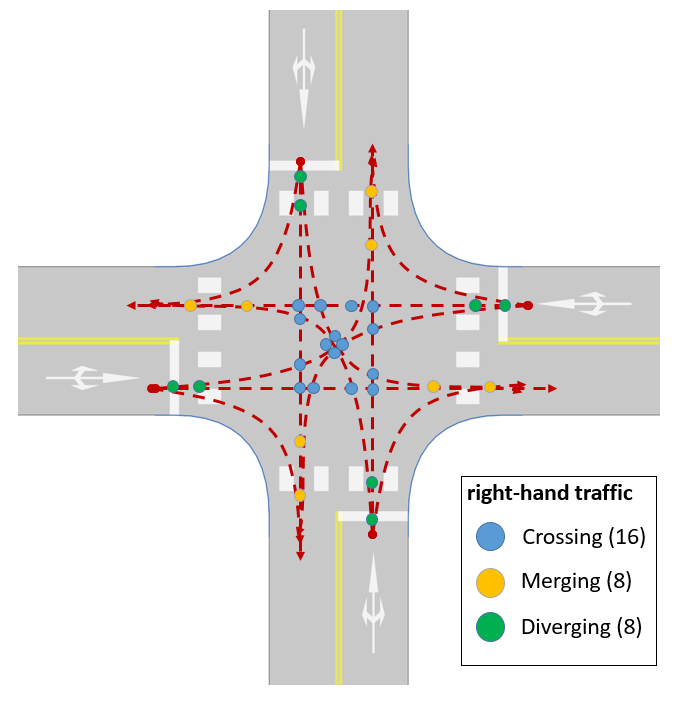
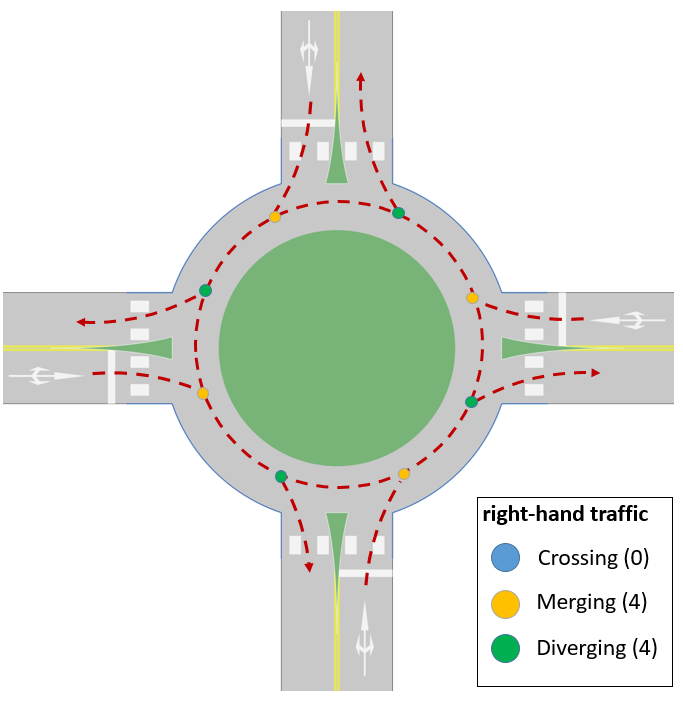
Figure 1: Intersection conflict points in standard and roundabout layouts emphasize geometric sources of collision risk.
The transition from SIM to AIM involves moving from group-based, signal-phase coordination to individual vehicle-level control, enabled by V2X communications and increasingly autonomous vehicle capabilities.
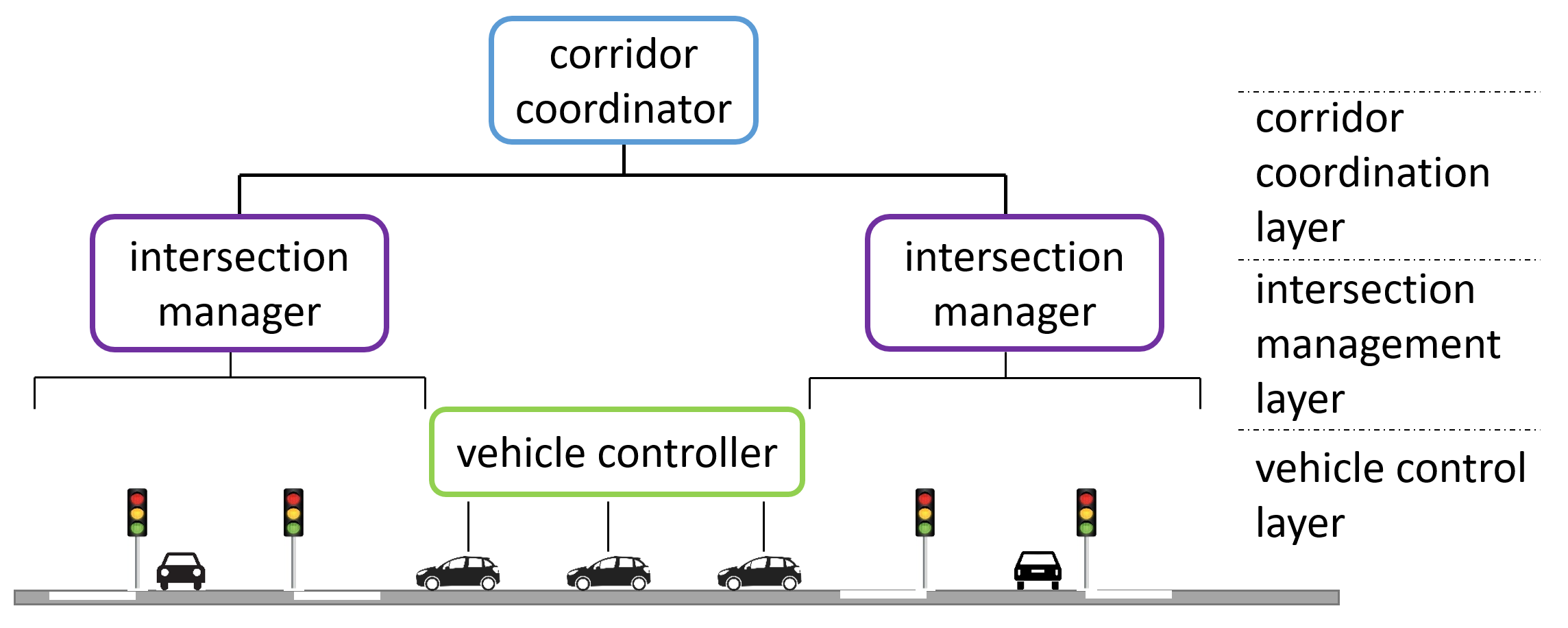
Figure 2: Intersection control layer visualizing communication dependencies and cross-layer interactions.
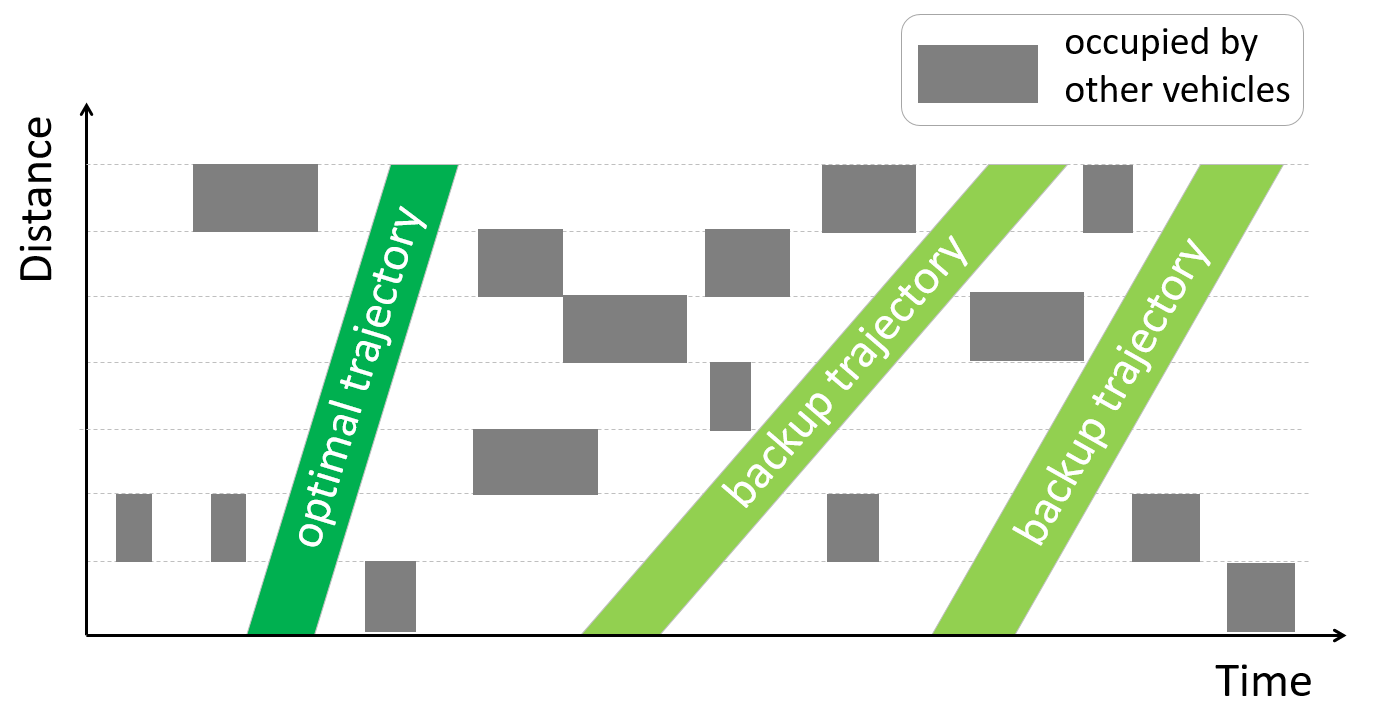
AIM Trajectory Planning: Reservation Systems and Priority Allocation
The core of AIM lies in the real-time allocation of intersection time-space resources for safe vehicle sequencing. Four principal reservation systems are reviewed:
- Intersection-Based: Exclusive occupancy for a single vehicle.
- Tile-Based: Space is divided into discrete tiles; occupancy conflicts are computationally managed.
- Conflict Point-Based: Reservations are defined per geometric conflict point, optimizing space utilization.
- Vehicle-Based (Free-Form): High flexibility, but computationally prohibitive due to complex nonlinear constraints.
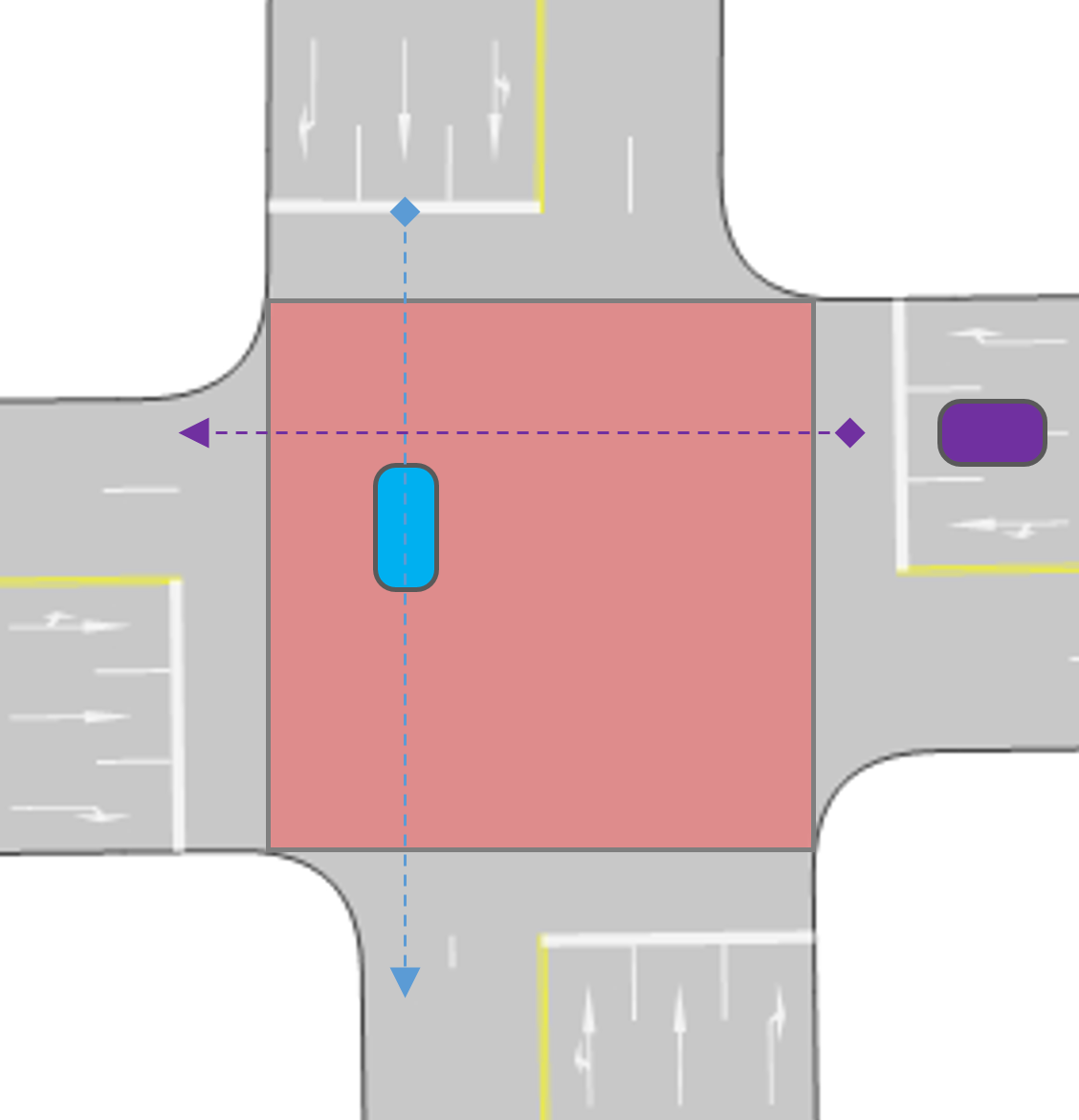
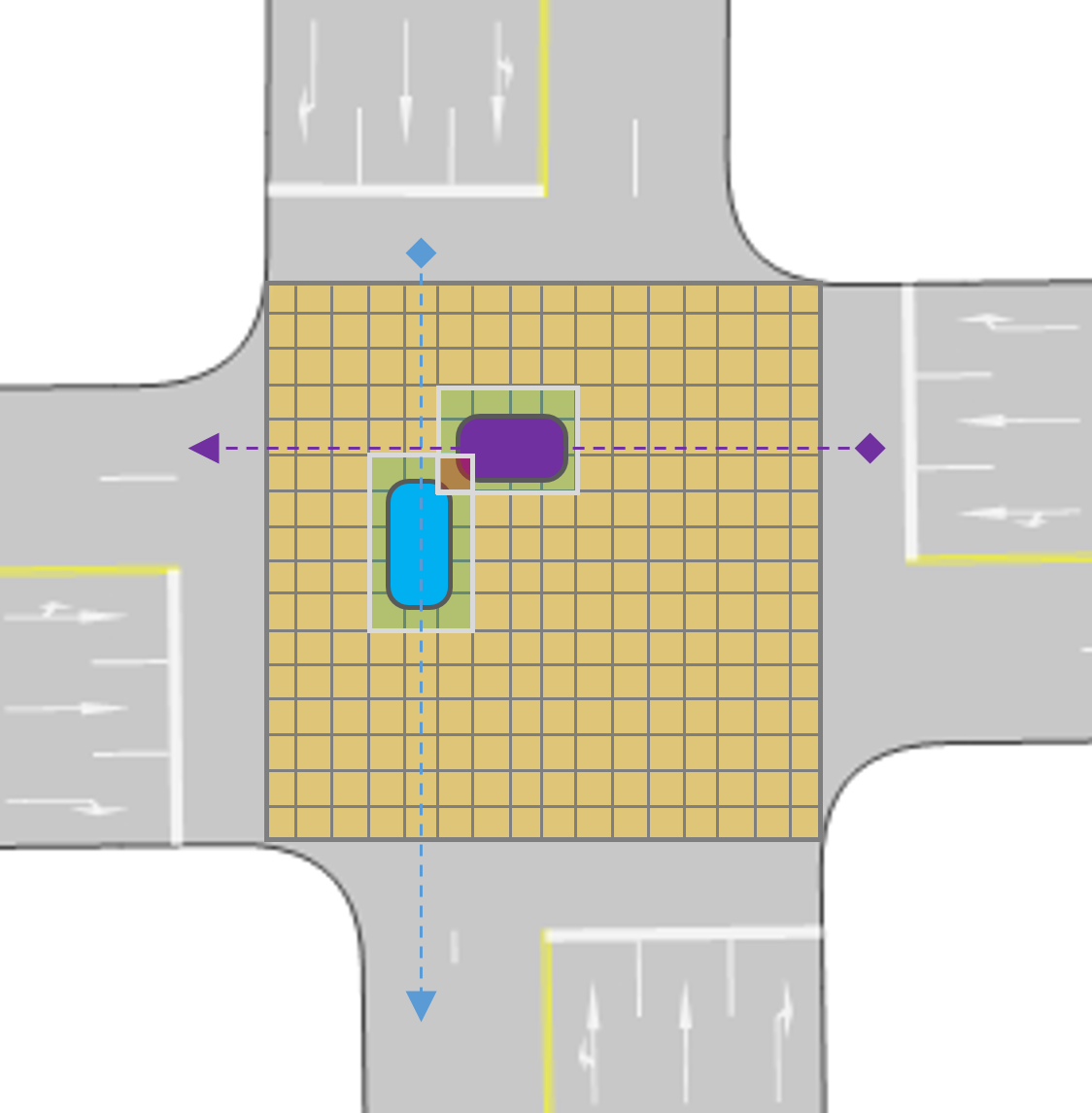
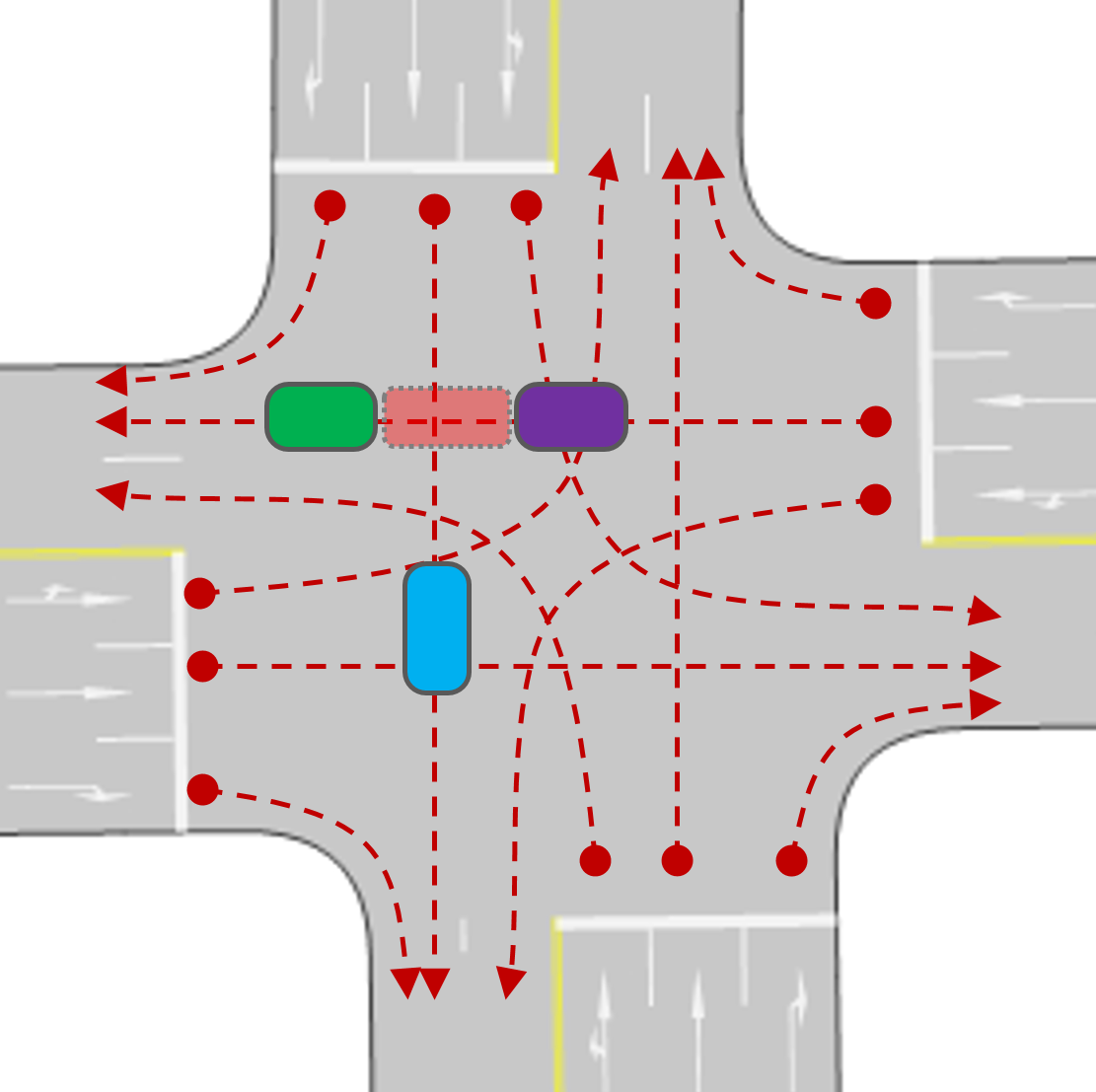
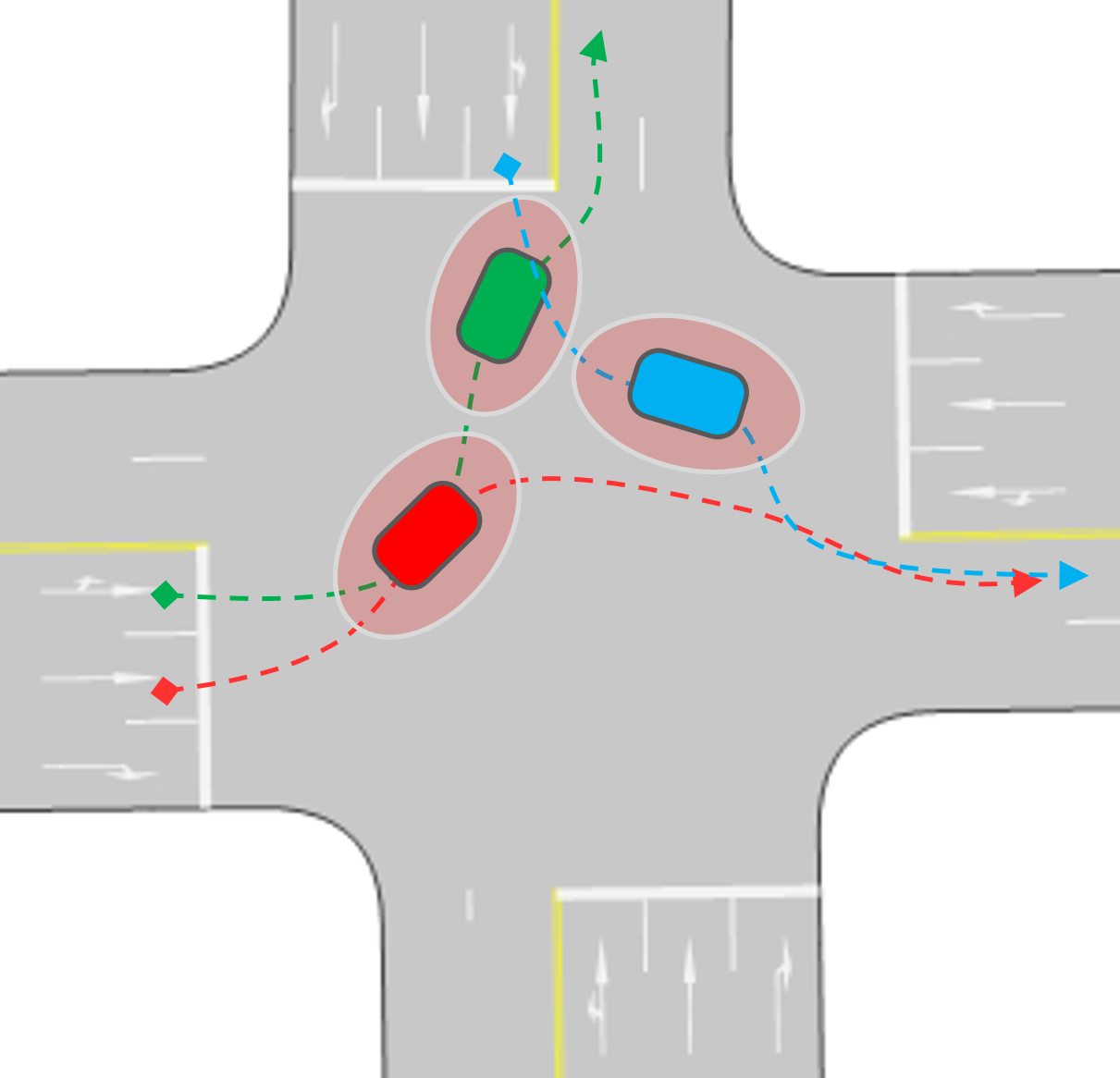
Figure 3: Types of reservation for intersection management illustrating the progression from restrictive to flexible allocation.
Trade-offs between computational tractability and intersection throughput are explicit: vehicle-based systems are theoretically optimal but not feasible for real-time large-scale deployment.
Priority Policies: Fairness, System Optimality, and Heuristics
Priority assignment fundamentally impacts intersection throughput, fairness, and delay:
Strong empirical and theoretical results show that while FCFS-AIM can outperform SIM under low demand, it is sometimes inferior in saturated scenarios or where the traffic signal can efficiently coordinate group movements. Network topology (parallel links, urban grids) and route choice behavior further modulate outcomes, as shown by large-scale simulation evidence.
Centralization, Decentralization, and Real-Time Communication
The survey dissects implementation architectures:
- Centralized: Single intersection manager aggregates data and makes global decisions; vulnerable to single-point failure, capacity, and scalability limits.
- Decentralized: Multiple local hubs (e.g., platoon leaders), improving fault tolerance and scalability.
- Distributed: Vehicles act as independent agents, making local decisions based on aggregate state; highest robustness but challenging for global optimization.
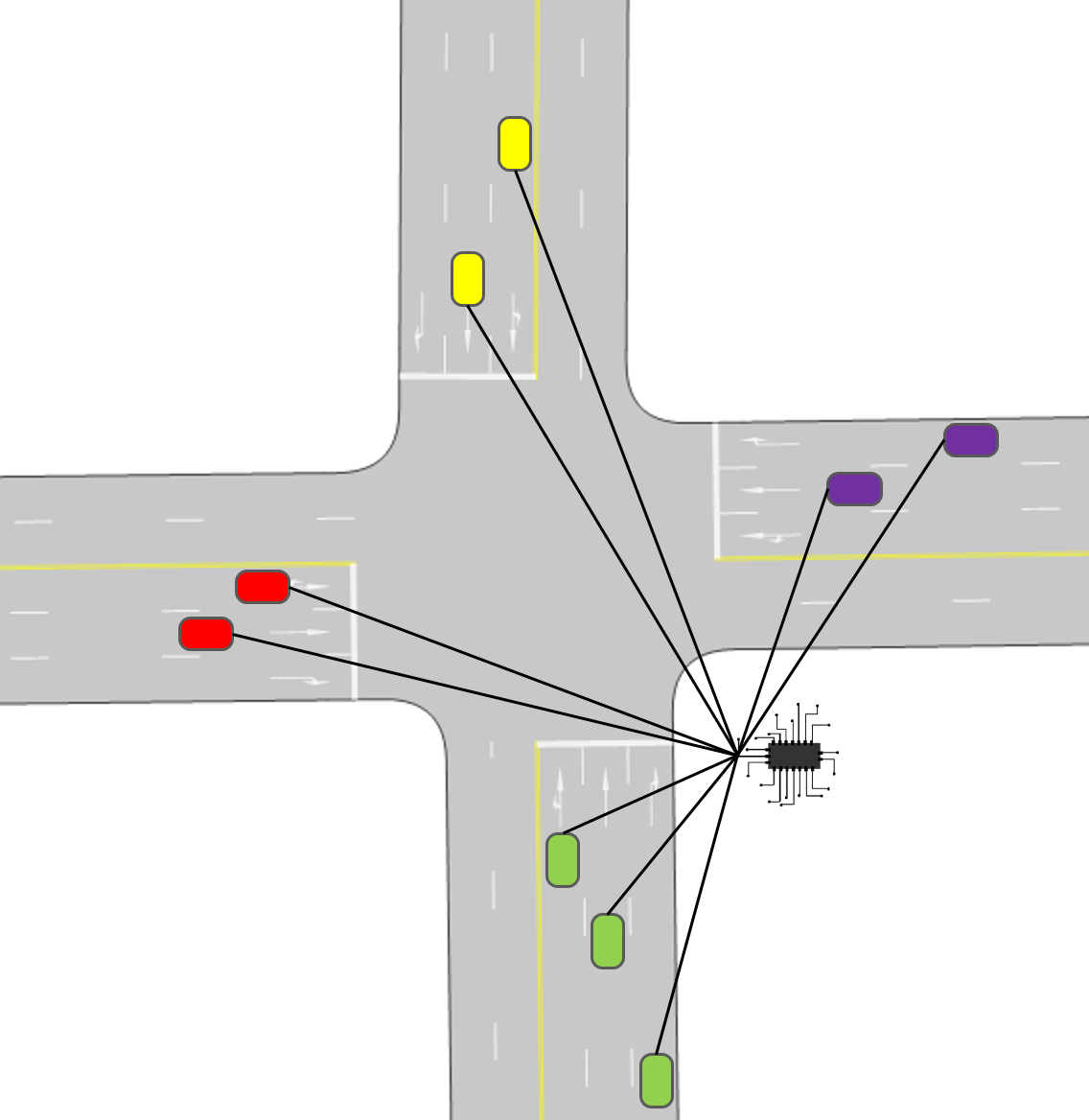
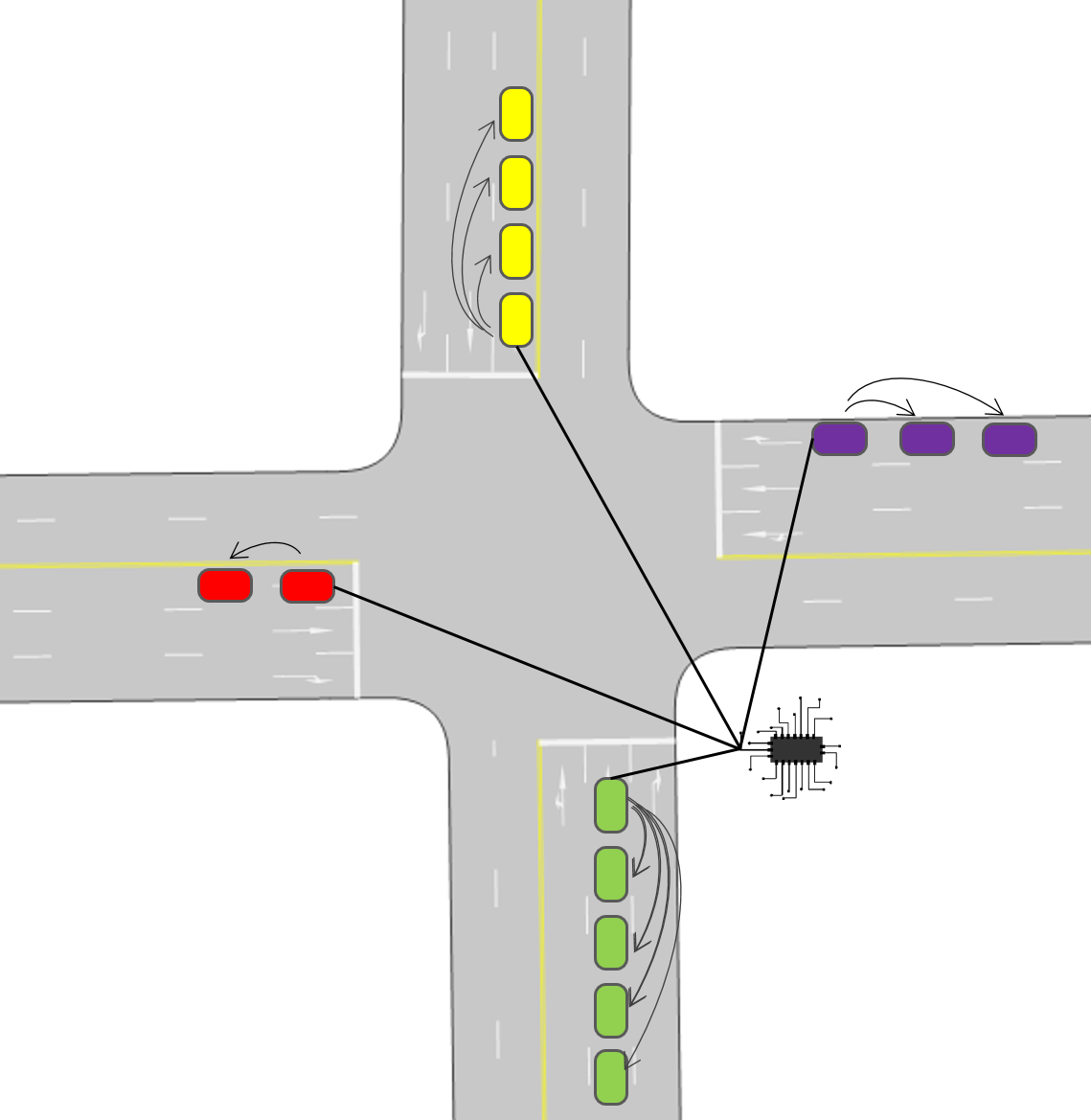
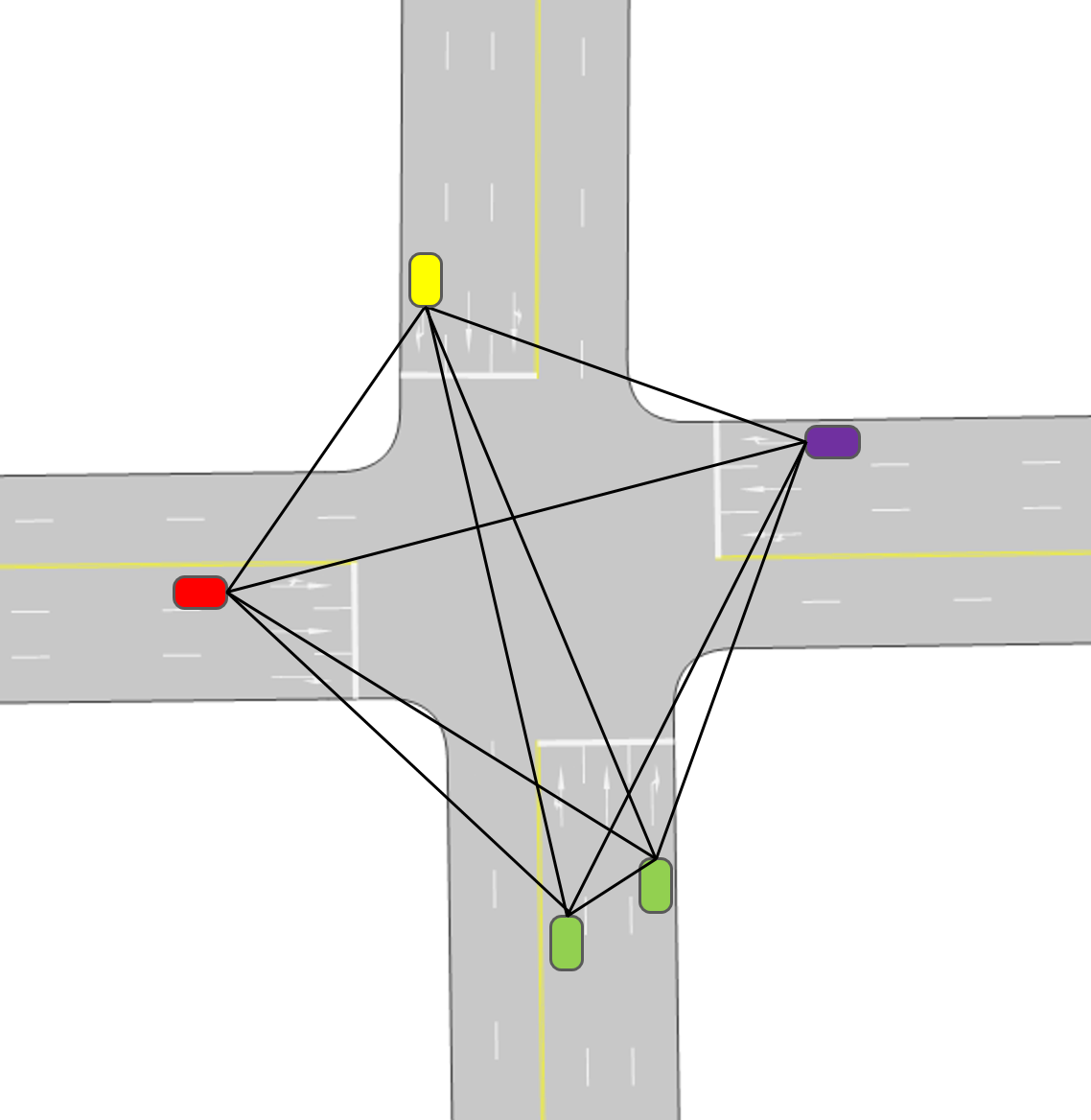
Figure 5: Communication structure of AIM distinguishing centralized, decentralized, and distributed frameworks.
Decentralized and distributed approaches are increasingly favored for their resilience, especially as edge computing capabilities proliferate in modern CAV platforms.
Vehicle Control Layer: Optimal and Model Predictive Control
AIM assumes robust longitudinal/lateral vehicle controllers. Most approaches model vehicle dynamics as second-order systems, with control strategies designed to minimize objectives such as delay, energy consumption, jerk, or emission subject to state and control constraints. Decentralized optimal control, MPC, and PD control schemes are analyzed for scalability, real-time feasibility, and smooth integration with trajectory planning.
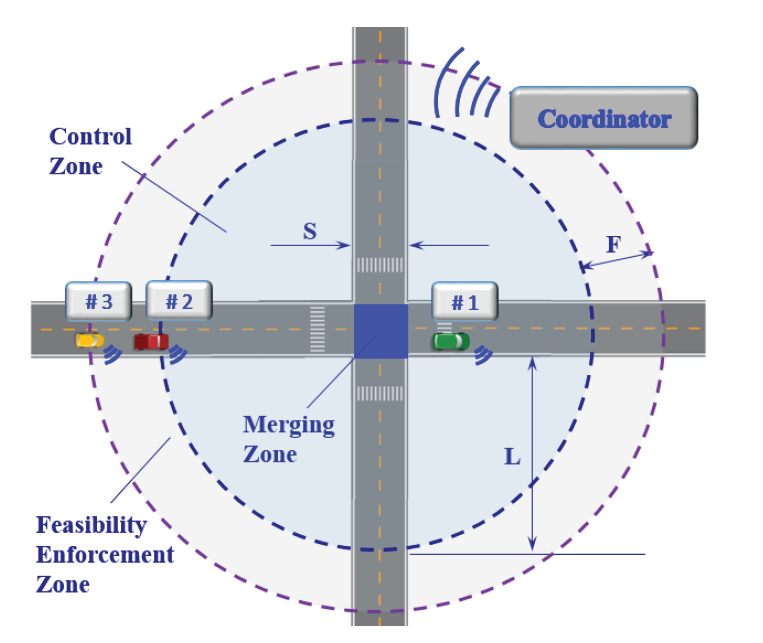
Figure 6: Intersection zones schematic illustrating control regions for entry, exit, and collision avoidance.
Analytic solutions often fail to scale; real-time convexification and decomposition methods (e.g., receding horizon MPC with local collision avoidance) are proposed to manage computational cost.
Evaluation Techniques: Simulation Scale, Benchmarking, and Effectiveness Metrics
AIM evaluation is typically conducted via high-fidelity traffic simulation, with studies ranging from isolated intersections (small N) to full urban networks (e.g., 30,000 vehicles). Studies focus either on near-optimal trajectory planning (without explicit vehicle dynamics) or combine realistic control models with limited vehicle numbers.
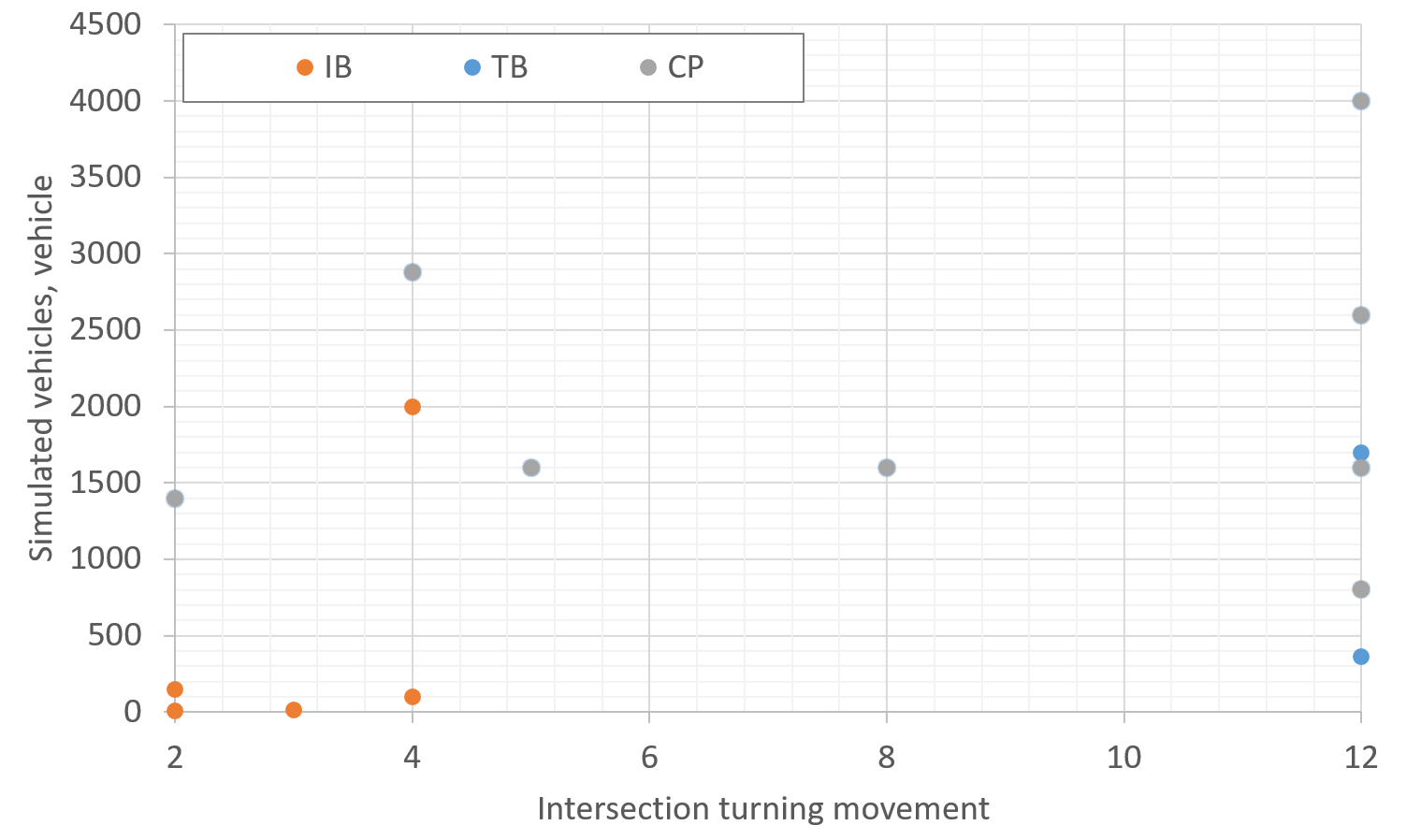
Figure 7: Simulation scale mapping vehicle/movement counts across AIM reservation methods.
Comparative benchmarks include fixed-time SIM, actuated/adaptive SIM, AWSC, and FCFS-AIM. Measures of effectiveness (MOE) include average delay, fuel consumption, CO2 emissions, throughput, and comfort.
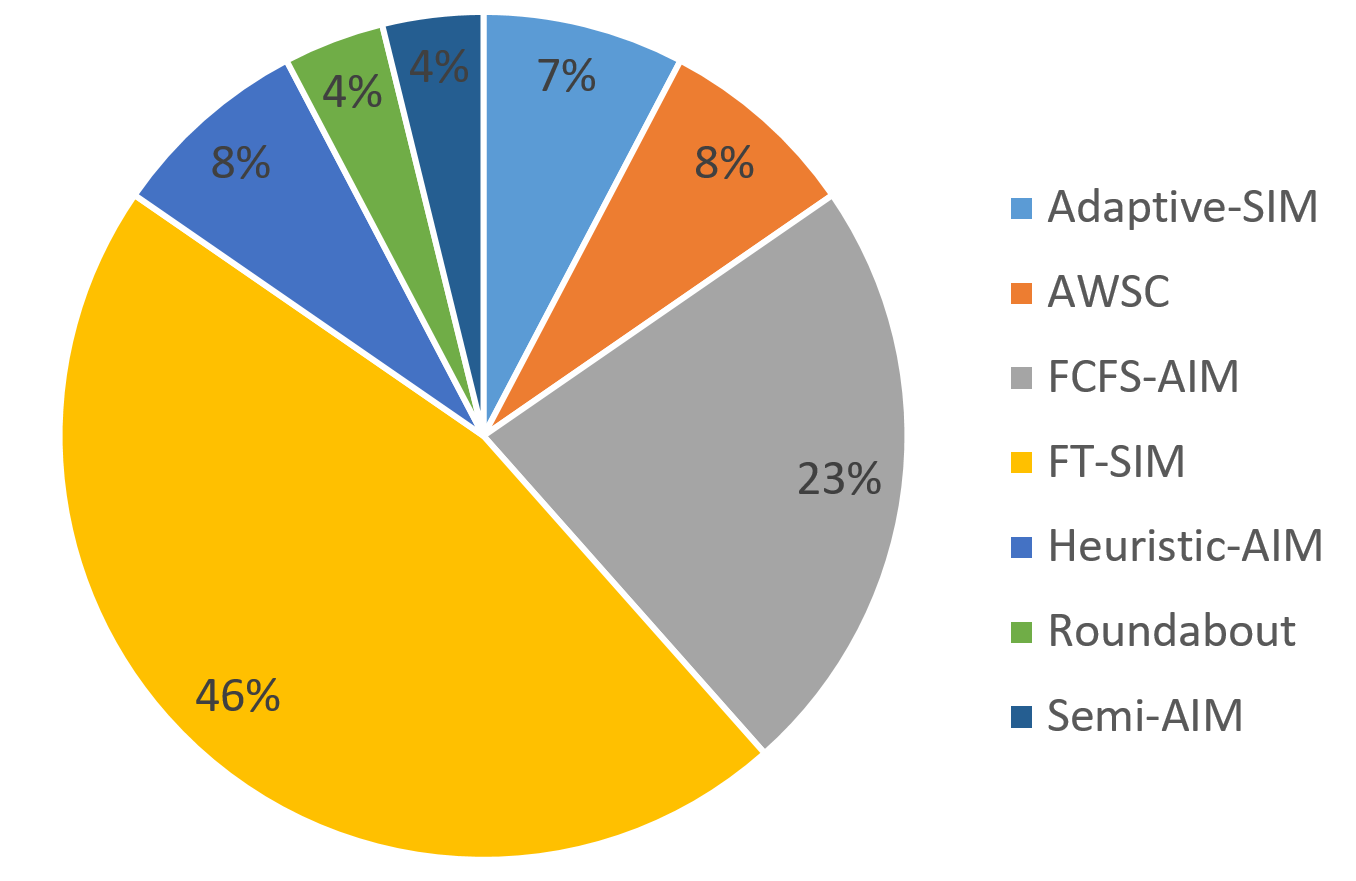
Figure 8: Comparing intersection managements by adoption rates in simulation studies.
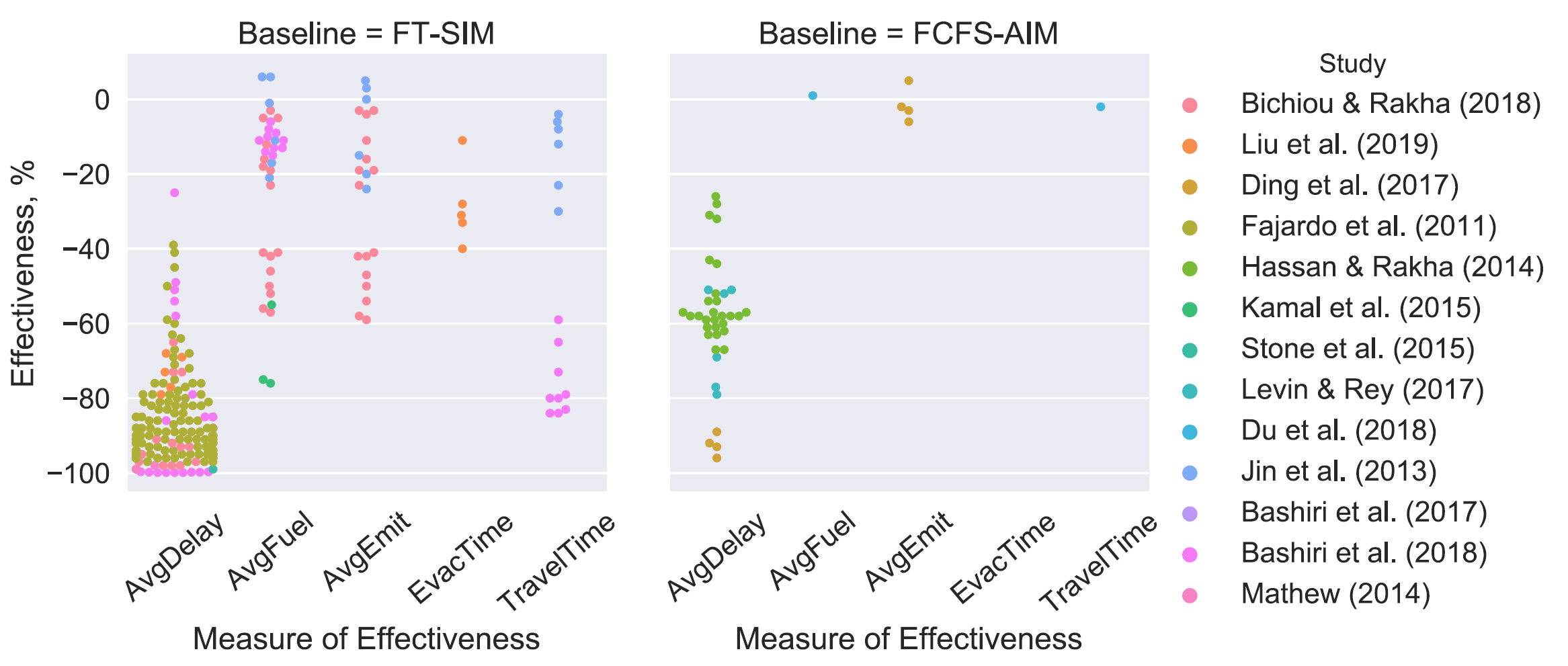
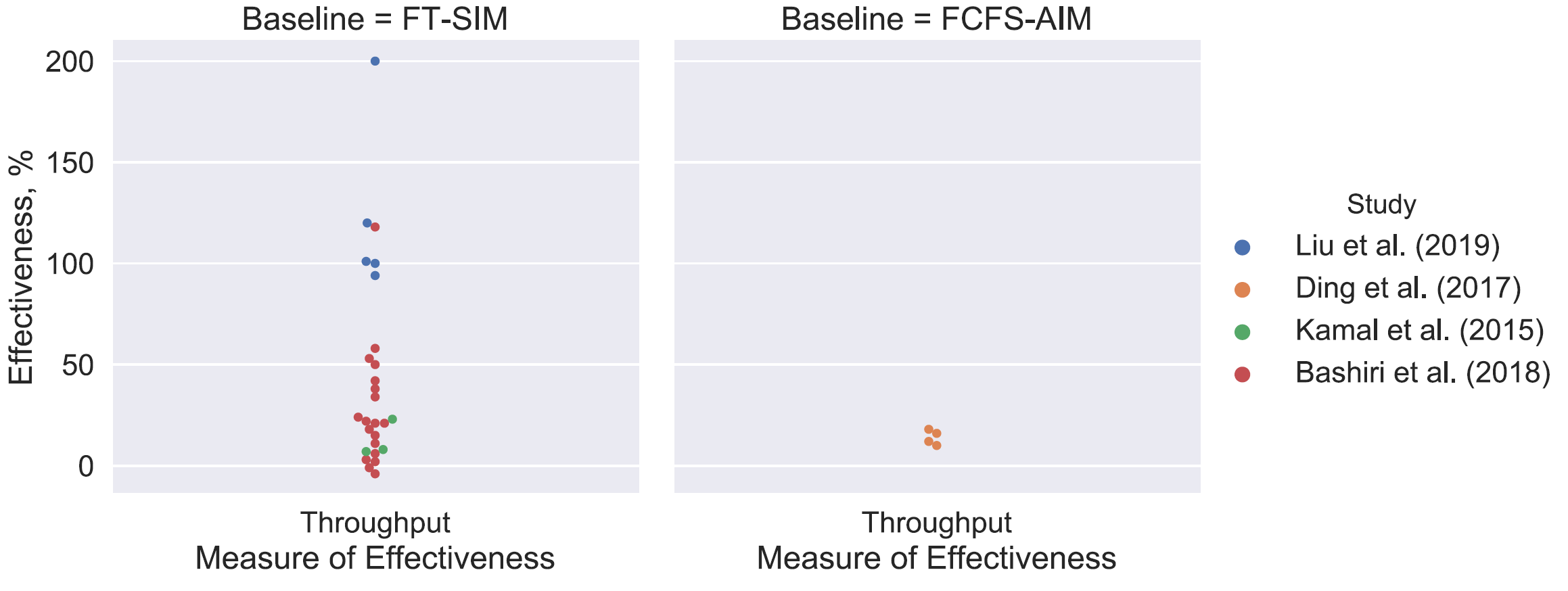
Figure 9: Measures of effectiveness quantifying delay, throughput, and environmental metrics improvement under AIM protocols.
Empirical results typically demonstrate significant improvements in delay and throughput under AIM, especially under uncongested conditions and with optimal reservation policies. However, simulation context—traffic saturation, movement complexity, and benchmark optimization—significantly affects apparent performance.
Research Frontiers and Future Topics
The survey outlines several unresolved technical challenges:
- Benchmarking and Real-World Validation: There is no consensus on universal test scenarios or standardized performance metrics akin to the Highway Capacity Manual for SIM; rigorous benchmarking is foundational for widespread AIM adoption.
- Semi-AIM and Mixed Traffic: Transitional frameworks integrating HVs and CAVs are required; signalization and fallback mechanisms remain essential during decades-long CAV penetration periods.
- Computational Efficiency: Real-time implementations demand scalable algorithms, especially for high-dimensional reservation systems (vehicle-based). Heuristics and problem decompositions are active areas of research.
- Intersection Layout Generalization: Non-standard layouts (e.g., DDIs, roundabouts) challenge the adaptability of current reservation and control algorithms.
- Cybersecurity: CAV-based AIM exposes new attack surfaces (spoofing, denial-of-service); algorithm design needs to account for adversarial scenarios and computational constraints.
- Decentralized Robustness: Trends toward edge computing, blockchain-based data integrity, and distributed decision-making are likely to shape future AIM platforms.
Conclusion
AIM systems represent a paradigm shift in intersection management, enabled by advanced CAV technologies and sophisticated multi-agent coordination algorithms. The trajectory planning, reservation, and control layers must be cohesively engineered to ensure safety, efficiency, and scalability across diverse traffic scenarios. While empirical studies frequently report large gains in delay and throughput metrics, translational barriers remain, especially related to real-time computational complexity, benchmarking, security, and mixed-traffic applicability. Continuing advances in decentralized control, algorithmic optimization, and intelligent communication protocols will be pivotal for the development and deployment of robust AIM frameworks in next-generation transportation networks.