- The paper presents an MPC-based control strategy that integrates V2V/V2I communication to safely reduce inter-vehicle gaps and double urban intersection throughput.
- The methodology combines high-fidelity simulation, closed-track, and public road experiments to validate real-time dynamic constraint switching and disturbance preview utilization.
- The experimental results show throughput improvements from approximately 2100 to over 4200 vehicles per hour per intersection, highlighting the potential of coordinated platooning in urban environments.
Model-Predictive Control for Urban Vehicle Platooning: Architecture, Theory, and Empirical Analysis
Introduction and Context
The paper "Improving Urban Traffic Throughput with Vehicle Platooning: Theory and Experiments" (2006.10272) addresses the design, theoretical analysis, and experimental validation of a vehicle platooning system explicitly optimized for improving urban intersection throughput. Platooning, the coordinated control of vehicles maintaining small inter-vehicle distances enabled by cooperative vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication, has been widely studied for highway and fuel efficiency settings. This work explicitly targets urban environments and focuses on intersection throughput, robust platoon management in the presence of unpredictable non-platooning vehicles, and the translation of theory to practice via both high-fidelity simulation and closed-track/public road experiments.
Architecture and System Design
The architecture relies on V2V and V2I communications to enable string-stable vehicle platoons to traverse complex urban scenarios, particularly intersections, with minimal headway. The system exploits a customized V2V message set, which includes multi-step velocity forecasts for all platoon members. Follower vehicles use these forecasts as disturbance previews in real-time model-predictive control (MPC) problems, tracking both the leader and, when necessary, a non-platooning lead vehicle. V2I links further allow the leader to react instantaneously to actuated traffic signals, maximizing effective green time for the entire platoon.
The vehicle hardware and communication stack is shown in the system diagram.
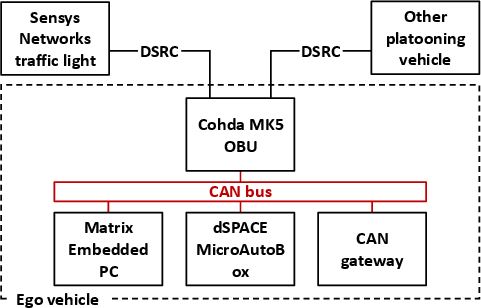
Figure 1: The test platform integrates computing, CAN-bus access, and low-latency V2V/V2I communications to enable simultaneous measurement and control across the platoon.
To coordinate platoon formation, management, and safety fallback, the system includes a finite-state machine (FSM) that synchronizes entries/exits and enforces safety invariants (e.g., timeouts, sensor validation, driver override) across all vehicles.
Early use of GPS-based inter-vehicle distance estimation led to centimeter-to-meter-level errors, but further experiments used radar-based V2V measurements to support tighter formations—trading communication overhead for sensor reliability.
Modeling, Control, and Safety Constraints
Vehicle dynamics are described via empirically-calibrated nonlinear continuous-time models that explicitly account for actuation delays and constraints, friction, and aerodynamic effects. Both leader and follower vehicles solve receding-horizon discrete-time linear MPC problems, which are re-linearized at each step around current velocities.
Leader MPC primarily tracks a desired velocity, subject to safety constraints regarding both front vehicle interactions and traffic lights. The latter is handled through a pair of switching terminal constraints:
- When a (non-platoon) front vehicle is present, a provably safe set CF(vF(0)) is imposed, ensuring safe headway even under full-brake deceleration by the lead vehicle.
- When approaching a red (or soon-to-be-red) light, a stopping constraint CTL is imposed using analytical collision-avoidance sets.
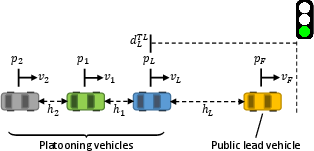
Figure 2: State definition for platoon members, leader vehicle, and horizon-based interaction with non-platooning traffic and traffic light state.
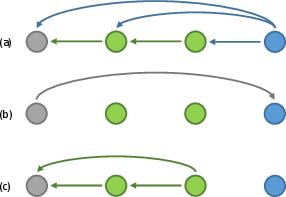
Figure 3: V2V communication patterns in a platoon, highlighting the leader's receipt of velocity forecasts and GPS/radar measurement transmission within the formation.
This dynamic obstacle prioritization mechanism (formalized via Propositions 1 and 2 in the text, and illustrated in Figure 4) reduces conservative behavior, applying only the dominant constraint at each instant. Follower MPC problems track both safe headway and inter-vehicle distance to the leader, using the forecast disturbance input to minimize tracking error within comfort (jerk) constraints.
Simulation and Throughput Quantification
The proposed architecture was evaluated in a custom MATLAB simulation environment supporting high-fidelity emulation of V2X communication, actuated traffic lights, and realistic urban driving scenarios. Simulation results confirm the correct interaction of MPC, safety switching, and information flow between vehicles and infrastructure.
Figure 2: MPC-controlled platoon approaching a traffic signal; states update based on both local and communicated measurements.
A key contribution of the paper is the explicit quantification of intersection throughput improvements. Using a metric derived from measuring the time interval for the trailing vehicle (N−1) to clear the intersection after the leader (with all vehicles modeled as extended bodies), the authors report peak simulated throughputs of 4200–4400 vehicles per hour (vph) per intersection movement, more than double the baseline non-platooned flows of ~2100 vph. These numbers are robust to reasonable variations in actuation response, controller tuning, and mild disturbances, matching prior simulation estimates in the CACC/platooning literature.
Experimental Validation: Closed-Track and Public Road Results
Closed-track experiments at the Hyundai-KIA Motors California Proving Grounds established the real-world viability of the system using a 3-car platoon of production vehicles augmented with Cohda MK5 OBUs, embedded computing, and modular controllers.

Figure 5: Test vehicles deployed at the proving grounds, supporting real-time coordinated platoon maneuvers and V2X messaging.
Empirical results confirm that the system maintains string-stable formations with inter-vehicle errors below 1m even under aggressive acceleration/deceleration profiles and bounded communication delays. The use of full-length velocity forecasts (F=Np) is critical for maximizing throughput; shorter trust horizons (or disabling V2V) results in large, throughput-degrading gaps.
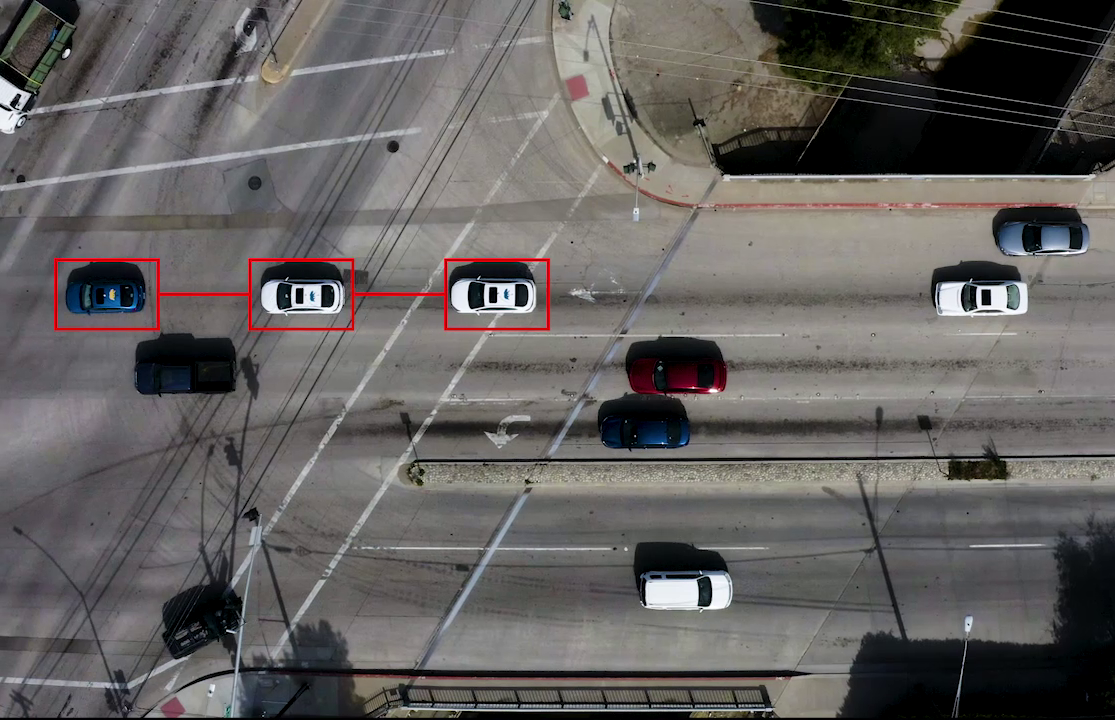
Figure 6: Overhead image from public road demonstration; the platoon proceeds as a coordinated unit, quickly and reliably clearing intersections in a dense urban corridor.
Urban traffic tests in Arcadia, CA, with eight consecutive instrumented intersections and significant human-driven background traffic, demonstrate the architecture’s resilience to real-world uncertainties, latency, and unpredictable maneuvers by non-platooning vehicles. The system successfully manages merges, interruptions, and red-light stops, leveraging dynamic constraint switching and V2I response for intersection handling.
Implications, Limitations, and Future Directions
Strong claims include the measured throughput doubling at intersections in both simulation and experiment under traffic-light-limited conditions, with compact platoon formations enabled by V2V forecast sharing and MPC-based tracking.
A practical implication is that the attainable urban throughput is limited by the slowest non-platooning vehicles within the platoon’s path, especially if they are encountered near intersections. This emphasizes the anticipated need for partial or complete penetration of cooperative automation, or dynamic platoon splitting, for maximum systemic benefit.
A second practical challenge is safety-aware disengagement and smooth driver takeover, particularly when a lead driver elects to override during a maneuver. The authors suggest that integrating robust fallback modes (e.g., defaulting to ACC for followers) would make field deployment more robust.
From a theoretical and engineering perspective, the use of programmatically-generated polyhedral approximations (via CVXGEN) for terminal constraints, and the explicit switching logic for MPC constraint sets, provide a reusable pattern for urban CAV control architectures.
The paper proposes future learning-based approaches for adaptive controller tuning to reduce deployment time across classes of vehicles and to respond to driver/passenger comfort preferences. This opens a pathway toward robust CAV control in mixed traffic, where learned safety margins and jerk penalties could adapt in real time to the operating regime.
Conclusion
This paper provides a rigorous, hardware-validated architectural and control blueprint for urban vehicle platooning aimed at maximizing intersection throughput. The main technical advances lie in dynamic safety constraint selection, integration of V2V/V2I messaging for aggressive headway reduction, and experimental confirmation of up to 100% throughput improvement over baseline controls in both simulation and public-road settings. The research exposes key future directions for machine learning-based controller tuning and for robust handover in mixed-autonomy traffic contexts, positioning the work as a critical reference for the deployment of urban cooperative automated driving systems.

