- The paper's main contribution is an alert-generation framework that uses simulation and inference-based approaches to predict and mitigate failure events in multi-agent teams.
- Methodology involves transforming natural language commands into pseudocode to create task transition models that effectively simulate robotic team behavior in disaster scenarios.
- Results show the framework reduces computational overhead and enhances human decision-making with timely alerts in high-stakes humanitarian operations.
An Alert-Generation Framework for Improving Resiliency in Human-Supervised, Multi-Agent Teams
Introduction
The paper "An Alert-Generation Framework for Improving Resiliency in Human-Supervised, Multi-Agent Teams" addresses the challenges and solutions for integrating human supervision in multi-agent robotic teams, particularly in high-stakes environments such as humanitarian assistance and disaster relief (HA/DR) operations. It emphasizes the necessity of human involvement due to human adaptive decision-making and expertise, while simultaneously leveraging the strengths of robotic systems.
The framework proposed in the paper seeks to enhance the resilience of such teams by implementing a sophisticated alert-generation system. This system is designed to detect potential failures or inefficiencies in real-time, leveraging a combination of state machine simulation and formal methods to probabilistically estimate the likelihood of unfavorable events.
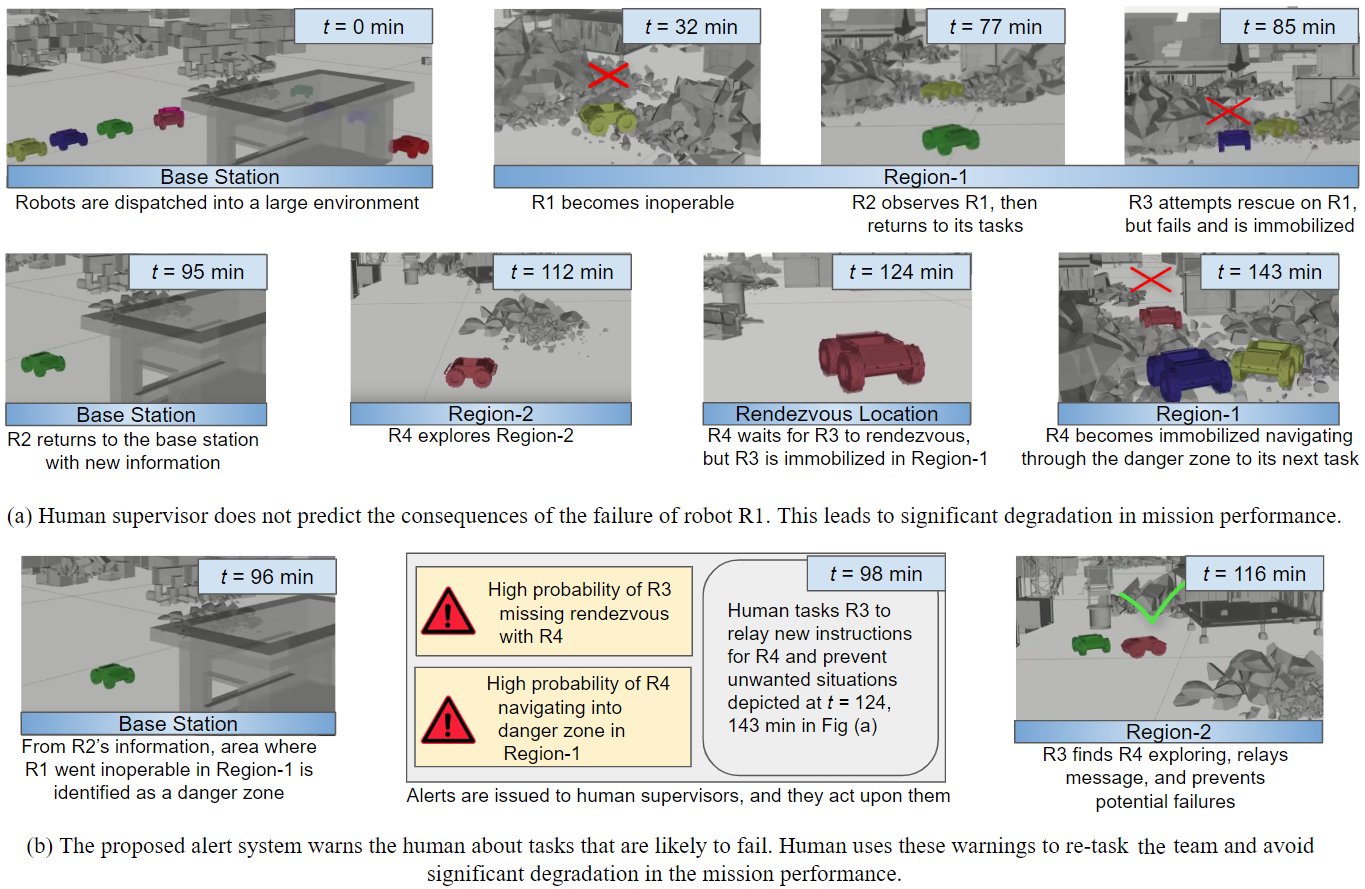
Figure 1: A motivating example scenario with four robots, R1 (yellow), R2 (green), R3 (blue), R4 (brown), visualized in Rviz.
System Architecture and Specifications
The proposed system introduces a comprehensive architecture for alert generation that involves a formal language to model human-provided instructions, transitioning these to pseudocode and subsequently into task transition models. This is illustrated in the transformation process from natural language commands to executable models, which the framework uses to simulate robotic team behavior.
The architecture is designed to address the unique communication and operational challenges posed by large, unstructured environments typical of HA/DR missions. It features a state machine-based simulation architecture which enables the detection of mission-critical conditions that could lead to failures.
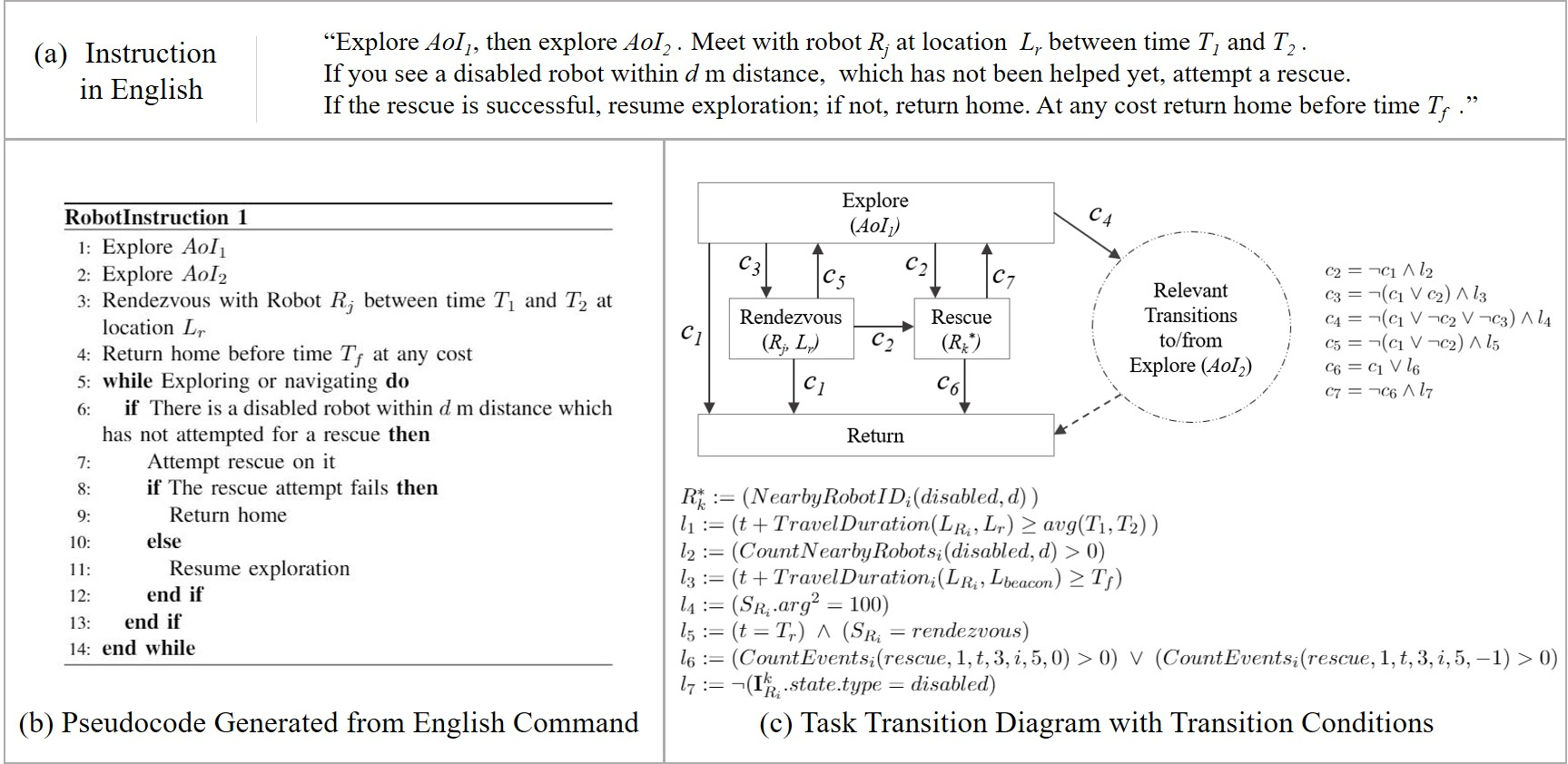
Figure 2: An example of the language decomposition offered by our proposed framework. English instructions provided by the human (a) are converted to pseudocode (b) that is used to generate a task transition model (c).
The framework’s alert conditions are formulated within a probabilistic temporal logic framework, allowing for flexible and expressive specifications that can adapt to varying mission requirements and human preferences. This formal specification is essential for capturing complex inter-agent dynamics and potential failure modes.
Alert-Generation Techniques
The framework deploys two primary methods to detect and respond to potential alerts: simulation-based and inference-based approaches.
Simulation-Based Approach: This technique utilizes discrete-time simulations to generate probabilistic estimates of potential system states. By conducting a large number of simulations, the framework is capable of estimating the likelihood of undesirable states arising. This is particularly useful for complex scenarios where real-time human inference may be infeasible.
Inference-Based Approach: Where possible, the framework uses deterministic inferences to provide guarantees on the occurrence of specific conditions. By converting state transition models into directed graphs, the framework conducts reachability tests to infer the certainty of reaching particular states within defined parameters, offering an alternative to probabilistic estimates when computationally viable.
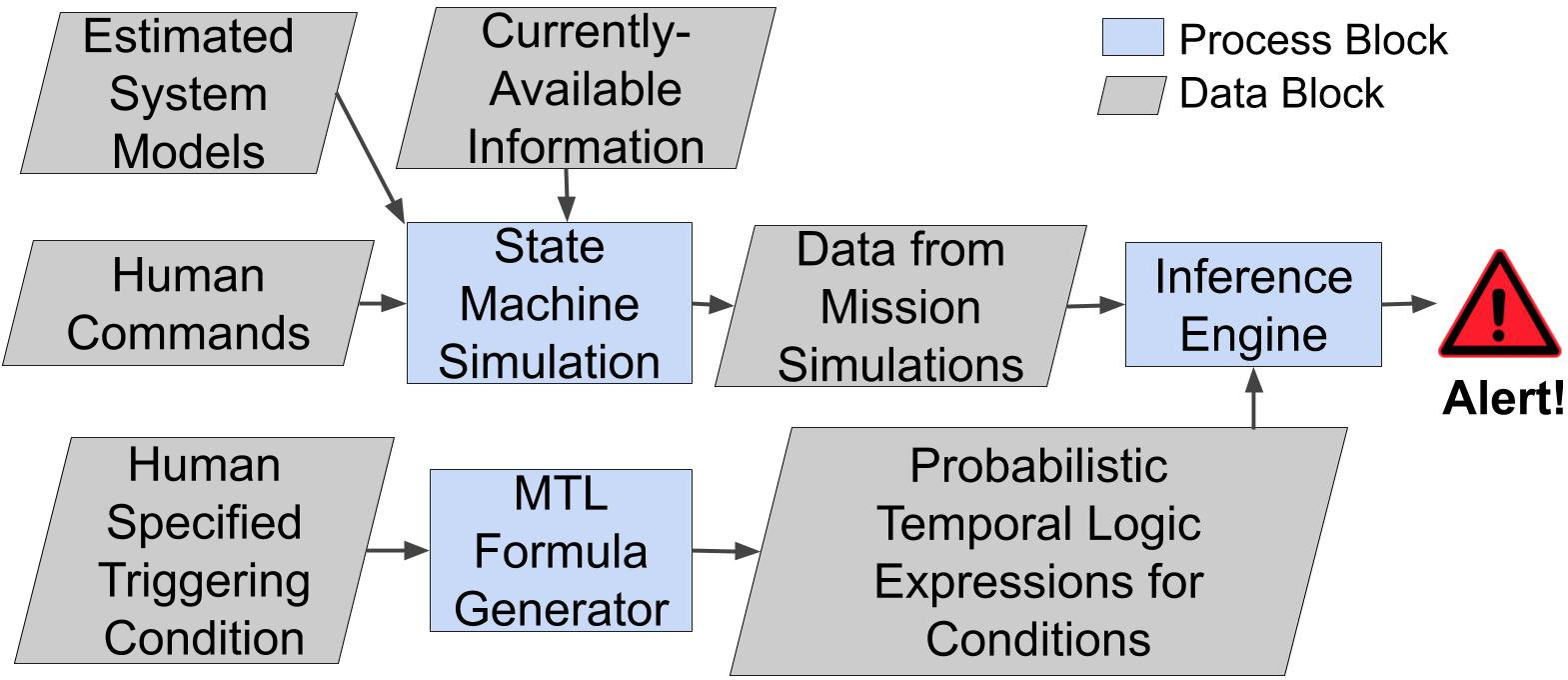
Figure 3: Block diagram of the proposed alert-generation framework. The grey slanted rectangles are data blocks and blue rectangles are processing components of the system.
Results and Implications
The evaluation of the framework highlights its capability to substantially reduce the computational overhead typically associated with Monte-Carlo simulations in detecting low-probability events. By integrating "smart simulations," the framework efficiently narrows down the number of required simulations while maintaining accuracy in probability estimation. This feature is critical in time-pressured environments where computational resources may be limited.
The proposed architecture not only enhances the resiliency of robotic teams but also augments human decision-making by providing timely and relevant alerts. This effectively transforms human-robot interaction from reactive to proactive, aligning with the dynamic and often unpredictable nature of disaster-stricken environments.
Conclusion
This framework presents a robust approach for enhancing the resiliency of human-supervised, multi-agent teams through an efficient alert-generation system. By employing both simulation and inference methods, the framework offers a practical solution to address the complexities and uncertainties inherent in HA/DR missions. The work lays the groundwork for future research in optimizing human-agent collaborative operations and developing intuitive, natural interfaces between human decision-makers and autonomous systems. Future developments may include refined probability threshold tuning for alert conditions and extended system testing in live operational scenarios.

