- The paper presents a membership-based negotiation protocol that integrates a priority matrix and risk estimation to manage safe intersection entry.
- It employs structured communication (get, grant, deny, release) to avoid priority violations and significantly reduce emergency braking in simulations.
- Simulation results highlight the protocol's fault tolerance and its potential to enhance traffic safety in autonomous vehicular systems.
Membership-based Manoeuvre Negotiation in Autonomous and Safety-critical Vehicular Systems
Introduction
The paper presents a negotiation-based intersection crossing protocol designed for autonomous and safety-critical vehicular systems. It focuses on fault tolerance and uses a distributed approach for vehicles to negotiate entry into intersections. By employing a membership-based method, this protocol allows vehicles to dynamically request and grant permissions to enter intersections, thereby enhancing the safety and efficiency of traffic flow. The protocol emphasizes prioritization, collision avoidance, and the integration of risk estimation alongside traditional traffic rules.
Protocol Design and Implementation
Priority Matrix
The protocol is based on a priority matrix that dictates which vehicles have precedence at an intersection. The matrix is composed of binary values that represent whether a vehicle should ask for permission to change priorities before entering an intersection.
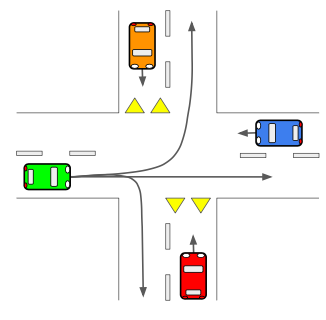
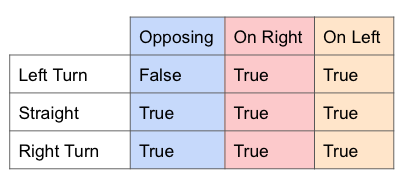
Figure 1: A priority matrix for the green vehicle coming in from the left on the priority road.
Vehicles approaching an intersection assess their priority relative to other vehicles by consulting this matrix. Lower priority vehicles must negotiate entry by requesting permission from higher priority vehicles.
Priority Negotiation
Vehicles negotiate entry based on their assessed priority level using a structured dialog protocol. The negotiation involves sending messages to vehicles with higher priority, and decisions are made based on a set of rules that ensure no priority violations occur. A priority violation occurs if a vehicle of lower priority obstructs a higher priority vehicle.
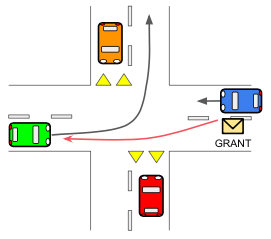
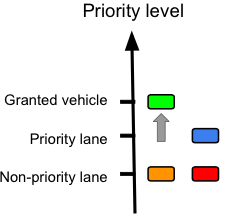
Figure 2: The green vehicle coming from the left is granted to temporarily increase its priority level.
Communication involves sending "get", "grant", and "deny" messages, with explicit release messages to indicate when a vehicle has completed its manoeuvre through the intersection.
Fault Tolerance and Safety
Risk Estimation
The protocol incorporates a risk estimator to predict potential collisions based on vehicle trajectories. The risk assessment considers both sensor data and communication between vehicles to better predict the likelihood of collision and mitigate risk.
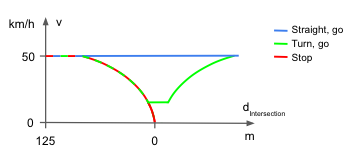
Figure 3: A speed model defining ideal speed v for a vehicle based on its distance from the intersection dIntersection.
This estimation enables vehicles to change their intentions if a potential collision is detected, preventing accidents.
Simulation and Testing
The protocol's efficacy was tested in simulation scenarios involving complex intersection maneuvers, communication loss scenarios, and noisy sensor data. Results highlighted the protocol's ability to maintain safety even in the presence of communication failures or sensory noise. For example, simulations showed a significant reduction in emergency breaks when the protocol was in use compared to when vehicles relied solely on risk estimation.
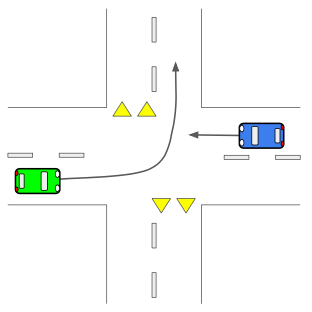
Figure 4: The scenario of a vehicle, L, turning left across the priority lane with an opposing priority vehicle, H, approaching, used for testing our system.
Implications and Future Work
Practical Applications
The protocol provides a structured approach to managing intersection crossing in autonomous vehicles, vital for improving traffic safety. Its implementation can complement existing autonomous driving systems by providing an additional layer of decision-making and safety through vehicle-to-vehicle communication.
Theoretical Contributions
The paper contributes to understanding how negotiation protocols can be designed to ensure safety in vehicular systems. It shows how combining risk estimation with priority-based negotiation can address and mitigate the risks associated with autonomous driving.
Future Developments
Future work could explore extending the protocol to complex urban environments and varied intersection types. Additionally, the integration of machine learning techniques into the risk estimation process may further improve the protocol's ability to predict and mitigate risky situations.
Conclusion
The membership-based manoeuvre negotiation protocol presents a promising approach for enhancing vehicular safety in autonomous systems. By combining risk estimation with dynamic priority negotiation, it offers a robust method for managing intersection crossing. This protocol could significantly contribute to reducing traffic accidents in autonomous driving scenarios while ensuring efficient traffic flow.