- The paper introduces a novel polling-systems algorithm that orchestrates vehicle crossings to guarantee safety and minimize wait times.
- It models vehicle arrivals stochastically and applies second-order dynamics to effectively manage intersecting traffic flows.
- Simulations demonstrate that the proposed method outperforms traditional traffic controls by reducing delays and enhancing throughput.
Polling-Systems-Based Autonomous Vehicle Coordination in Traffic Intersections with No Traffic Signals
Introduction
The paper "Polling-systems-based Autonomous Vehicle Coordination in Traffic Intersections with No Traffic Signals" (1607.07896) investigates a novel approach to managing autonomous vehicle flow in intersections devoid of traffic signals. It introduces a coordination control algorithm derived from polling systems, offering both performance and safety guarantees by the way vehicles are controlled to prevent collisions and minimize wait times.
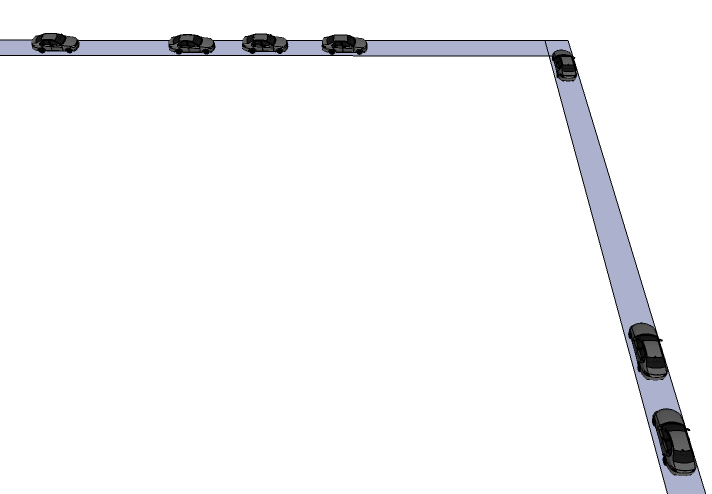
Figure 1: An illustration of a fully autonomous traffic intersection. Autonomous vehicles arriving near the intersection are fully controlled by a central control system.
Problem Definition
The study sets out to address the dynamics of autonomous vehicles at intersections where traditional traffic signals are absent. Two orthogonal lanes are considered, each bound by second-order dynamics expressed as x¨(t)=u(t), with constraints on velocity (vmax) and acceleration (amax). The vehicles are managed once they enter a defined control region, which is then controlled by a central system.
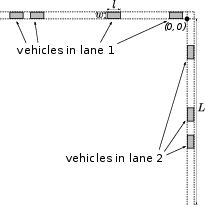
Figure 2: An illustration of the control region.
The arrival process of vehicles into this control region is stochastic, modeled to ensure that collisions are inherently avoided. Safety is defined by the absence of intersection in the intervals occupied by vehicles from different lanes, ensuring an optimal trajectory is present for each vehicle based on polling system-derived scheduling times.
Control Policy
A polling system is utilized wherein multiple queues representing lanes are serviced by a central server. This server switches between queues based on defined polling policies such as exhaustive, gated, and k-limited policies. The service orders in these queues dictate the scheduling of vehicle crossings at intersections to ensure the vehicles follow a coordinated progression through the intersection region, minimizing waiting times compared to traditional traffic systems.
The algorithm designed for this application takes inspiration from these polling systems, simulating vehicle additions to the queue and computing service order and times based on current queue states. This structure ensures the vehicles are optimally clustered into chunks, allowing intersection throughput to maximize while minimizing delays.
Analysis and Theoretical Results
The paper provides comprehensive theoretical guarantees for the algorithm. A set of two main results are derived:
- Safety Guarantees: The algorithm ensures no vehicle collisions occur within the control region at any time.
- Performance Guarantees: The delay experienced by vehicles is bounded by analogous delays in a comparable polling system without differential constraints.
The stability of the coordination algorithm is examined, providing conditions under which the system remains stable (i.e., minimal thinning due to overcrowding). These conditions are aligned with fundamental results from the polling systems literature.
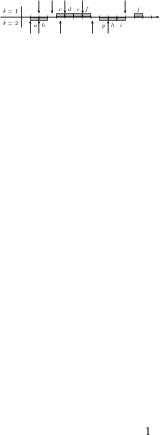
Figure 3: Sample trajectories from set $\mathscr{C$ show vehicles maintaining necessary unique paths through the intersection without collision.
Computational Experiments
In computational simulations, the proposed algorithm demonstrates significant performance strides. It achieves notably lower delays compared to traditional traffic light systems. The trajectory and clustering behavior are validated through representative simulations under various load conditions, showcasing efficient vehicle platooning.
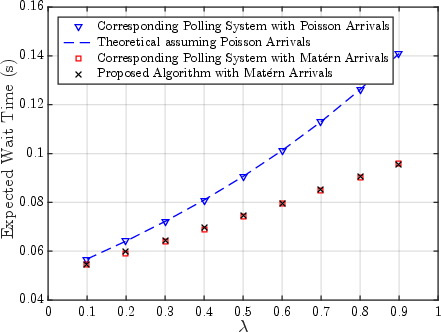
Figure 4: Comparison of the expected wait time of Algorithm~\ref{algorithm:main} and traditional traffic controls.
Conclusion
The paper's contributions lie in developing a robust coordination framework for autonomous vehicles at intersections without traffic signals, leveraging concepts from polling systems to achieve provable safety and performance guarantees. The algorithm demonstrates efficiency in simulations, offering a promising method for future autonomous vehicle integration into urban traffic systems. This intersection management approach could significantly influence urban planning and autonomous vehicle infrastructure development, providing a pathway to enhanced transportation efficiency with minimal environmental impact.

