- The paper demonstrates that learning joint distributions over short temporal windows effectively captures nonlinear dependencies in chaotic systems.
- It utilizes a transformer-VAE backbone to enable robust uncertainty quantification via ensemble variance, autocorrelation, and cumulative Wasserstein drift.
- Empirical results on Lorenz–63 and Kuramoto–Sivashinsky systems show improved short-term tracking and long-term fidelity to invariant measures while avoiding mode collapse.
Generative Joint Probability Models for Forecasting Chaotic Dynamical Systems
Introduction and Theoretical Motivation
Chaotic dynamical systems present forecasting challenges due to their extreme sensitivity to initial conditions and the presence of unresolved, multiscale processes that introduce irreducible epistemic uncertainty. Traditional deterministic or conditional probabilistic models, which estimate p(xt∣xt−1,…), are inherently limited for these settings because they do not capture the full structure of temporal dependencies and uncertainty propagation. Generative models, especially those that learn the joint probability distribution over short temporal windows, offer significant advantages by more faithfully modelling nonlinear dependencies, supporting robust uncertainty quantification, and enabling statistically consistent long-range forecast behavior.
The framework proposed in "Generative forecasting with joint probability models" (2512.24446) reframes forecasting as learning the joint distribution p(xt,…,xt−(n−1)) and performing inference via marginalization, rather than direct parameterization of the conditional p(xt∣xt−1,…). This design captures nonlinear temporal couplings and emergent behaviors inaccessible to standard next-step predictors. The core principle is that joint models can generate trajectory segments (of length n), providing ensembles from which next-step forecasts are obtained by marginalization, and, crucially, allowing intrinsic quantification of forecast uncertainty through the geometry of the point cloud in sequence space.
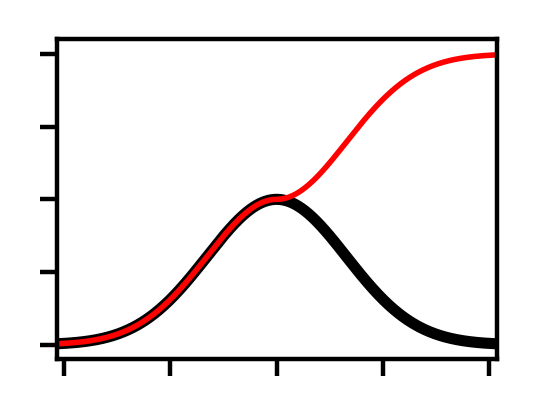
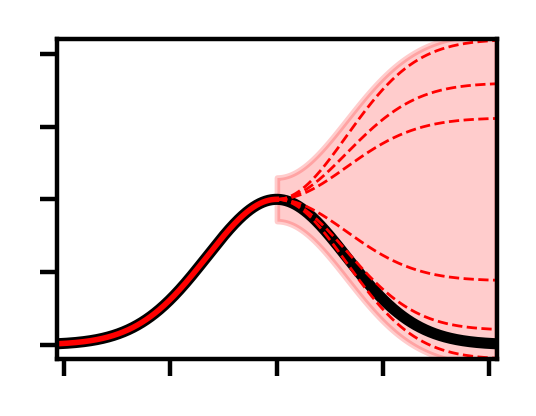
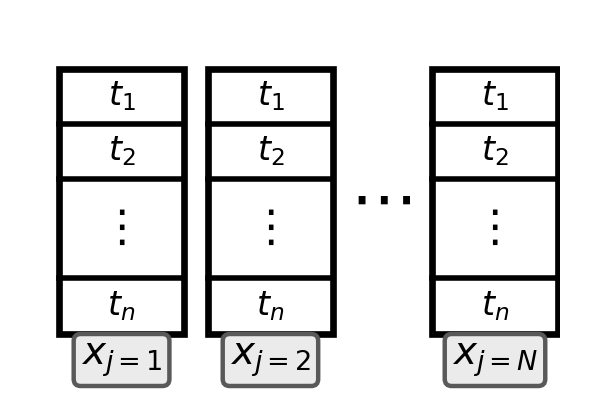
Figure 1: Schematic of the generative joint forecasting framework: (A) highlights uncertainty in chaotic system evolution, (B) shows the core methodology of joint temporal modelling and marginalization, (C) details inference by sieving the joint ensemble, (D) visualizes intrinsic uncertainty quantification metrics.
Methodology and Training Procedures
The joint generative model p^θ(xt,xt−1,...,xt−n+1) is realized via generative neural architectures (e.g., variational autoencoders or autoregressive transformers). The core method relies on constructing training datasets of n-step sequences, with network architectures separating spatial and temporal axes for scalability. Inference is realized via a marginalization procedure whereby a "point cloud" of jointly sampled sequences is generated; the sequence whose historical segment best matches observed history is selected and its predicted state(s) used as forecast(s).
Critically, this method is model-agnostic regarding the choice of generative backbone, supports both unconditional and conditional variants, and enables extensions such as latent optimal control (gradient-based optimization in latent space to match observed histories in high-dimensional settings).
Uncertainty Quantification via Joint Sampling
The intrinsic ensemble nature of the joint model enables three complementary, data-driven uncertainty metrics without access to ground truth:
- Ensemble variance: Empirical variance of the point cloud's forecast states.
- Short-horizon autocorrelation: Empirical correlation between successive time steps across joint samples.
- Cumulative Wasserstein drift: Quantifies the drift between overlapping marginals in forecast trajectories, serving as a proxy for accumulated forecast error.
Empirical Evaluation on Canonical Chaotic Systems
The framework is evaluated on two canonical benchmark systems:
- Lorenz–63: Prototypical low-dimensional chaotic ODE system.
- Kuramoto–Sivashinsky (KS): High-dimensional PDE system with spatiotemporal chaos.
All models use a transformer-VAE backbone with fixed architecture, trained on dense trajectories to sample short windows for joint distribution estimation; evaluation utilizes independent test initializations for short-term skill, long-term attractor fidelity, and error prediction.
Short-Term Prediction: Improved Tracking and Error Growth
In both systems, unconditional joint models (sampling the joint distribution and inferring via marginalization) demonstrate superior short-term prediction skill compared to conditional models. For Lorenz–63, the unconditional joint model maintains alignment with reference trajectories for longer horizons (well beyond one Lyapunov time) and exhibits consistently reduced mean absolute error growth in ensemble tests. For KS, both joint variants preserve fine-scale patterning in the spatiotemporal field and outperform baselines in componentwise and spatially-averaged MAE across 10-step and 100-step horizons.
Long-Term Statistical Consistency and Attractor Geometry
Unconditional and conditional joint models substantially improve fidelity to the true invariant measure (PDF) of the system, especially in the tails. In Lorenz–63, joint models avoid mode collapse and reproduce extreme values not covered during training—addressing underrepresented gray-swan risk events. For KS, unconditional joint models achieve notably closer adherence to true marginal statistics across all states.
Intrinsic Uncertainty Metrics: Robust Estimation of Forecast Error
Regression analysis demonstrates that the ensemble-derived variance, autocorrelation, and cumulative Wasserstein drift, especially when combined, explain a significant fraction of stepwise forecast error (with Pearson coefficients >0.7 for the joint model on both systems). Ensemble-averaged regressions (over multiple trajectory realizations) yield even higher explanatory power, indicating these UQ metrics are robust, and informative beyond mere sample variance.
Practical and Theoretical Implications
The reframing of forecasting as joint generative modelling fundamentally alters the capabilities of data-driven surrogate models for chaotic systems:
- Improved Out-of-Distribution Robustness: Enhanced tail and extreme value statistics imply better generalization to rare/unseen events. This can break the mode collapse and under-dispersive forecasting typical in conditional or deterministic neural models, especially in scientific domains where rare extremes dominate risk and downstream impact.
- Intrinsic UQ without Ground Truth: All uncertainty diagnostics are computed solely from the joint sample geometry, enabling rigorous model diagnostics, adaptive trust assessment, and uncertainty-driven decision-making even in the absence of observational validation data.
- Model-Agnostic and Extensible: The formulation supports general backbone choices (VAEs, transformers, diffusion models), easy extension to conditional settings, and potential fusion with physics-informed constraints, hybrid neural/physical emulators, or scalable tensorized architectures for very high-dimensional domains.
Limitations and Future Directions
Several computational limits are identified. The need for dense point clouds (to ensure accurate history matching in high-dimensional marginals) scales poorly with dimension and window size, manifesting the curse of dimensionality. Latent optimal control (gradient-based search in latent code space) partially alleviates this, but full scalability remains an open challenge. Future work should address:
- Efficient generative architectures supporting high-dimensional, long-horizon joint inference (e.g., structured or tensorized factorization).
- Integration of inductive biases reflecting invariances, conservation laws, or energy consistency for long-term stabililty.
- Adaptive temporal windowing and dynamic order selection to exploit varying memory in the underlying process.
- Direct applications to operational forecasting in climate, ocean, and turbulence settings, where epistemic uncertainty and rare event representation are critical.
Conclusion
Joint generative probability modelling defines a principled and practical foundation for robust probabilistic forecasting in nonlinear dynamical systems. By learning and sampling joint distributions over short temporal windows, this framework achieves superior short-term accuracy, long-term statistical realism, and intrinsic uncertainty quantification. These capabilities are particularly salient for scientific applications involving multiscale chaos, "gray swan" extremes, and incomplete physical knowledge. With further progress in efficient scalable architectures and hybrid physical/data-driven designs, generative joint forecasting offers a promising path towards trustworthy data-driven emulation for high-consequence scientific domains.

