Wireless Center of Pressure Feedback System for Humanoid Robot Balance Control using ESP32-C3
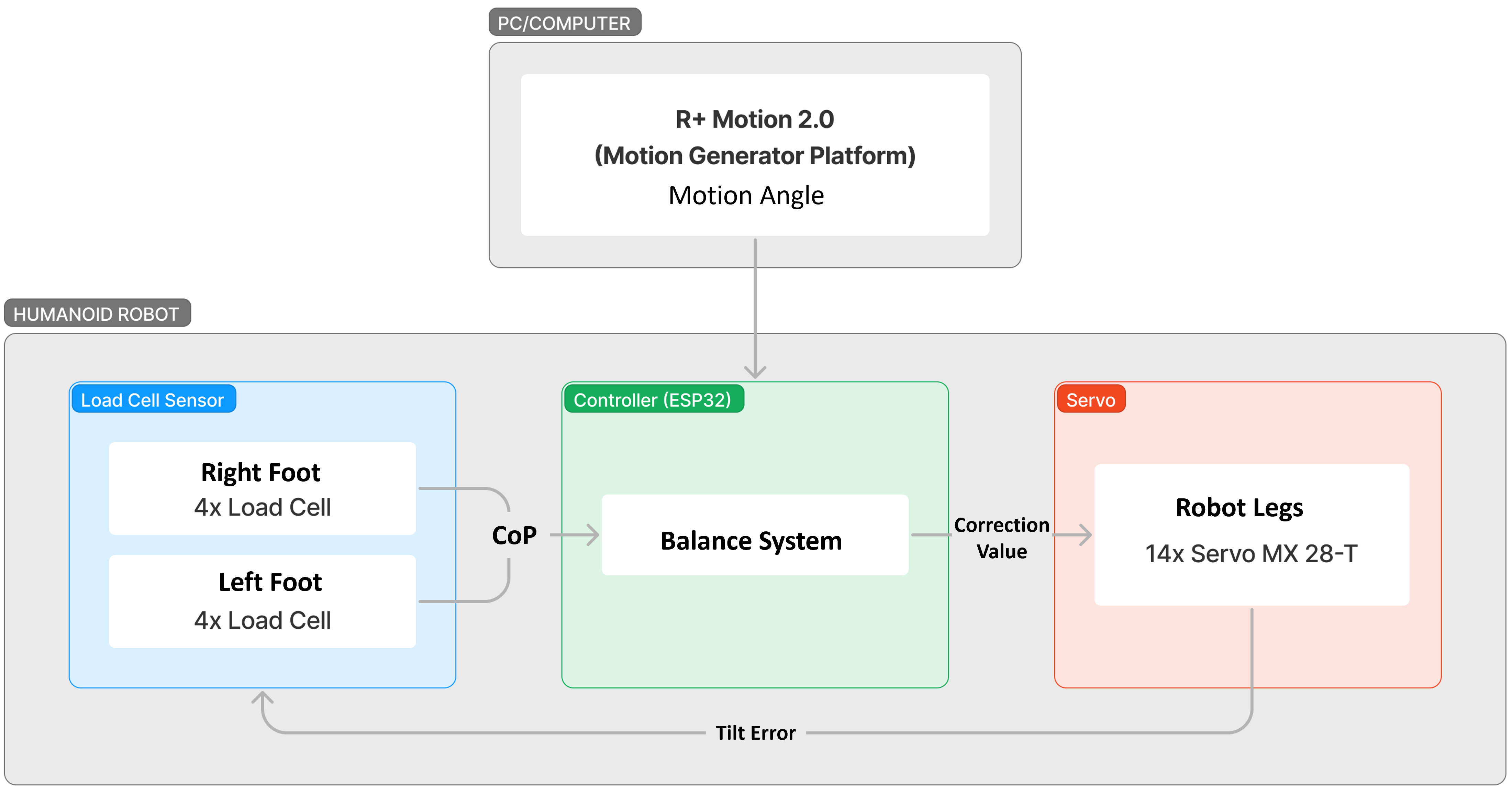
Abstract: Maintaining stability during the single-support phase is a fundamental challenge in humanoid robotics, particularly in dance robots that require complex maneuvers and high mechanical freedom. Traditional tethered sensor configurations often restrict joint movement and introduce mechanical noises. This study proposes a wireless embedded balance system designed to maintain stability on uneven surfaces. The system utilizes a custom-designed foot unit integrated with four load cells and an ESP32-C3 microcontroller to estimate the Center of Pressure (CoP) in real time. The CoP data were transmitted wirelessly to the main controller to minimize the wiring complexity of the 29-DoF VI-ROSE humanoid robot. A PID control strategy is implemented to adjust the torso, hip, and ankle roll joints based on CoP feedback. Experimental characterization demonstrated high sensor precision with an average measurement error of 14.8 g. Furthermore, the proposed control system achieved a 100% success rate in maintaining balance during single-leg lifting tasks at a 3-degree inclination with optimized PID parameters (Kp=0.10, Kd=0.005). These results validate the efficacy of wireless CoP feedback in enhancing the postural stability of humanoid robots, without compromising their mechanical flexibility.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Easy-to-Understand Summary of the Paper
What is this paper about?
This paper explains how the authors built a smart, wireless system to help a dancing humanoid robot keep its balance, especially when standing on one foot or on a slightly tilted surface. They put special pressure sensors in the robot’s feet and used a small Wi‑Fi microcontroller to send that data to the robot’s main brain. With this information, the robot adjusts its joints to stay upright without using a lot of cables that could limit movement.
The main questions the paper tries to answer
- Can a robot use “pressure under its feet” to balance better, especially on uneven ground?
- Is a wireless foot-sensor system accurate and fast enough to help a robot keep its balance?
- What control settings make the robot most stable when lifting one foot?
How the system works (in simple terms)
Before we dive in, here are a few terms explained in everyday language:
- Degrees of freedom (DoF): Think of these as “ways a joint can move.” A 29‑DoF robot has 29 moving axes across its body.
- Load cell: A small sensor that acts like a tiny bathroom scale. It measures how much weight or pressure is on it.
- Center of Pressure (CoP): Imagine standing on your foot—there’s a spot under your foot where most of your weight is pushing down. That spot moves as you lean. The robot tracks that spot to know if it’s losing balance.
- Roll: Side-to-side tilting, like leaning left and right.
- PID control: A common control method that helps machines keep a target position, like cruise control in a car. It has three parts:
- P (Proportional): reacts to how far you are from the target.
- I (Integral): corrects small errors that build up over time.
- D (Derivative): slows you down so you don’t overshoot (like tapping the brakes when approaching a stop sign).
- ESP32 / ESP32‑C3: Small, low-power computers with Wi‑Fi used inside the robot to read sensors and send data wirelessly.
Here’s their approach, step by step:
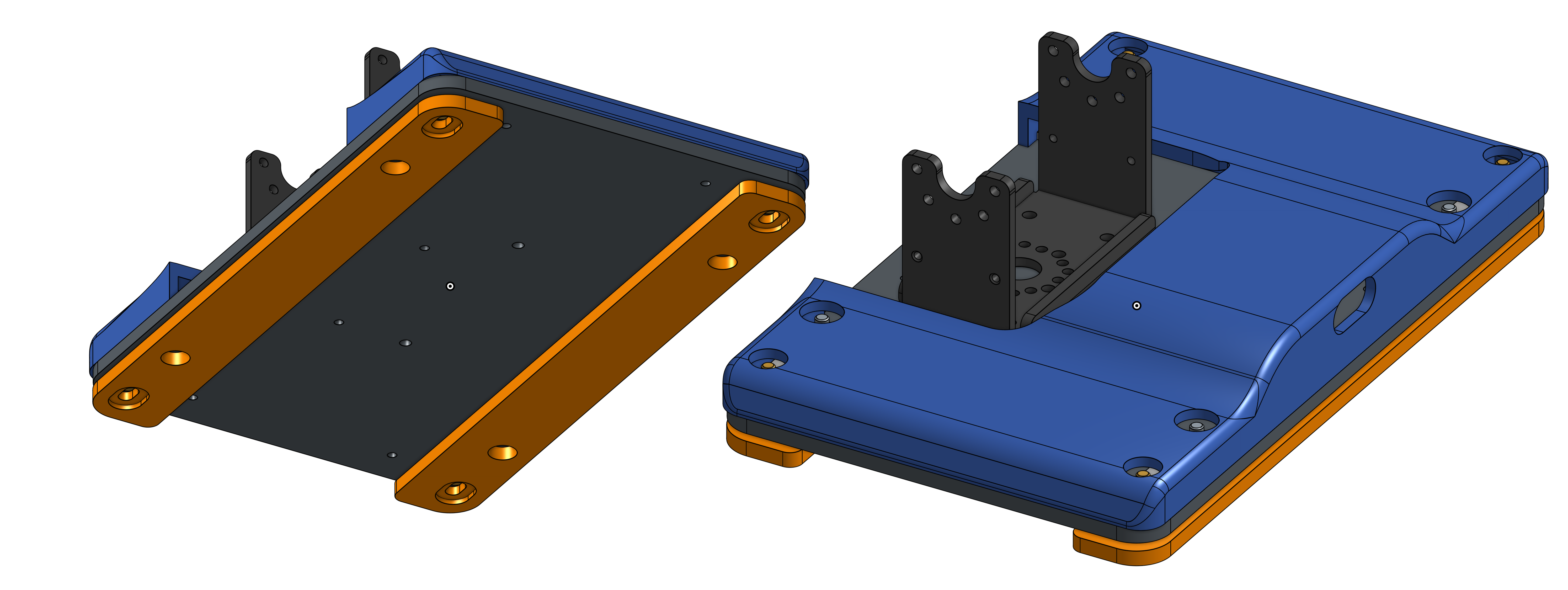
- Hardware in the feet:
- Each foot has 4 load cells (one near each corner). Together, they act like a smart shoe that senses where the weight is.
- A tiny ESP32‑C3 microcontroller sits inside each foot. It reads the four sensors and sends the results wirelessly.
- Wireless communication:
- The foot computers send the CoP and total pressure data to the robot’s main ESP32 controller over Wi‑Fi. This reduces the number of cables, which is important for a 29‑DoF dancing robot that needs to move freely.
- Calculating the CoP:
- The system combines the four sensor readings in each foot to find where the pressure is centered.
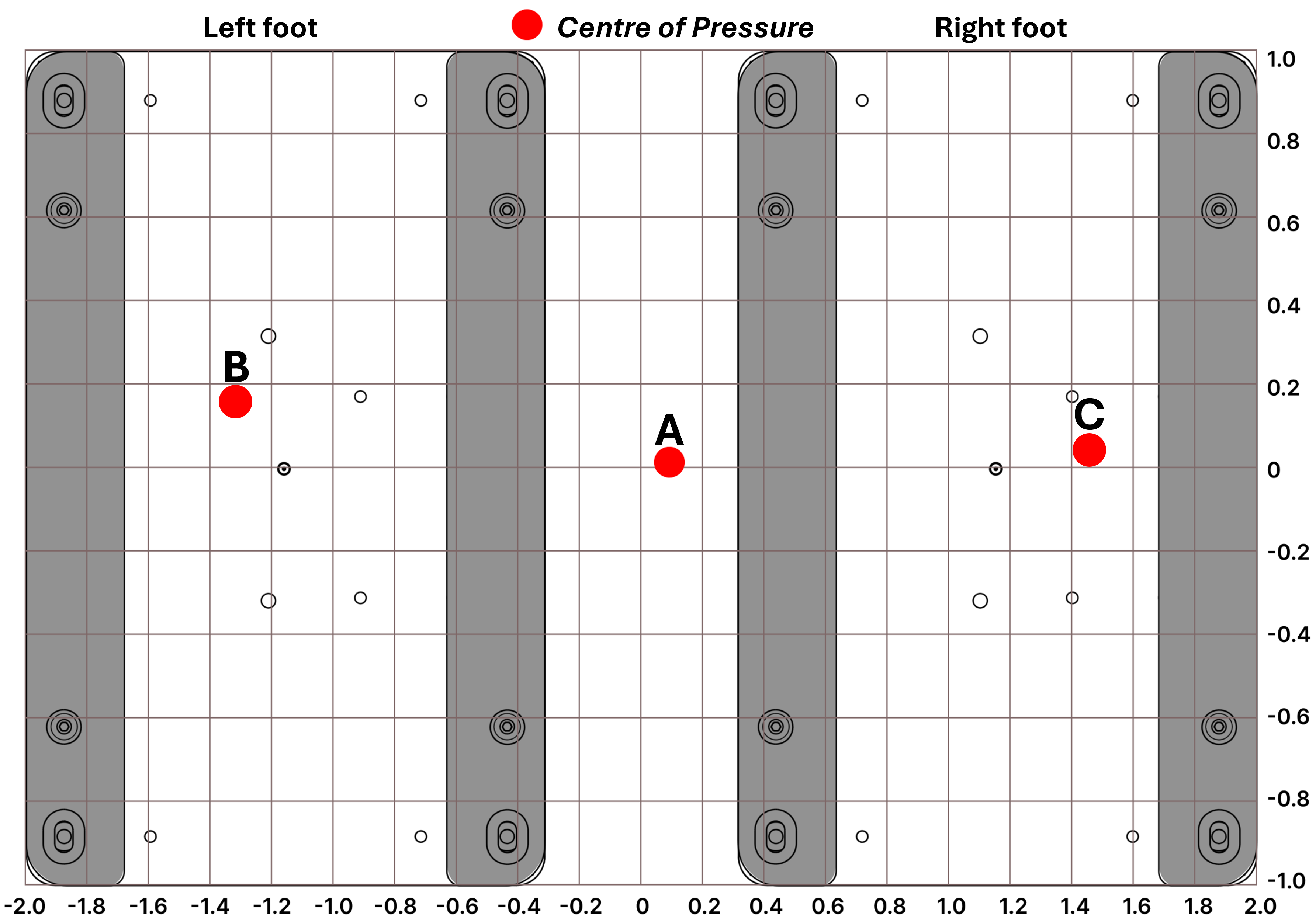
- It then combines the left and right foot data to locate the robot’s overall CoP (is weight on the left foot, the right foot, or in the middle?).
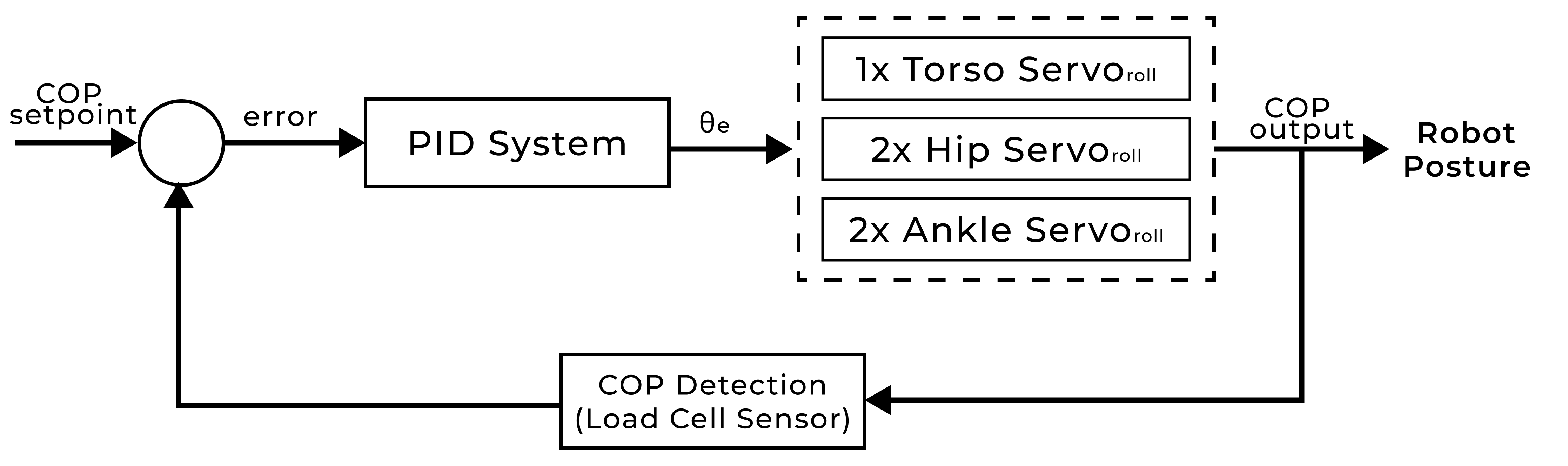
- Controlling balance with PID:
- The robot watches the CoP move. If it shifts too far to one side, that means the robot is tipping.
- A PID controller commands certain joints to tilt the body back to center:
- Torso roll joint (upper body)
- Hip roll joints (left and right)
- Ankle roll joints (left and right)
- The hip joints do most of the balancing shift; ankles make small fine adjustments; the torso helps share the movement smoothly.
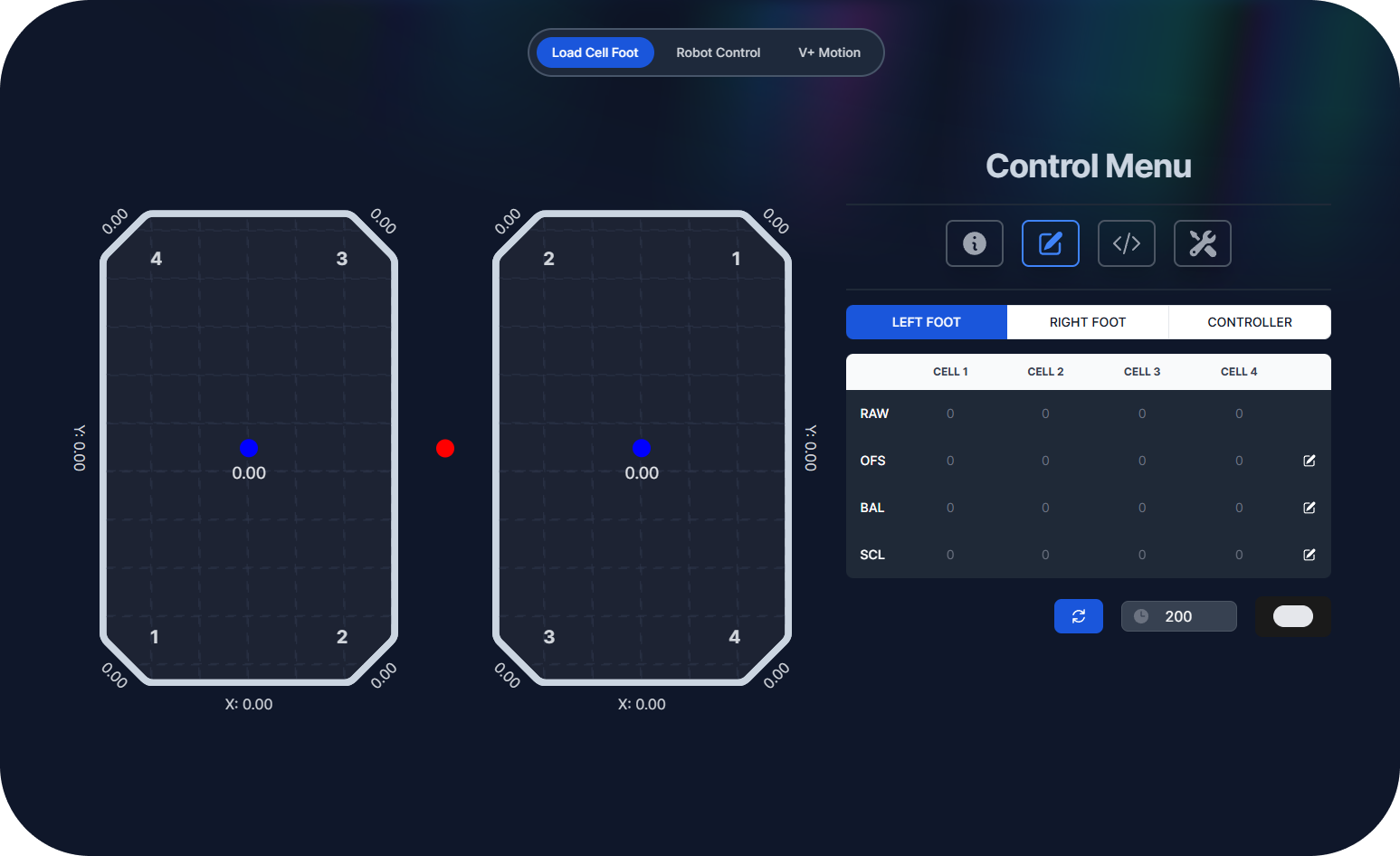
- Calibration and setup:
- The team built a simple web app so they could calibrate the load cells (like zeroing and scaling a bathroom scale) and see the CoP live.
What did they test?
- Sensor accuracy:
- They put known weights (like 50 g, 100 g, 200 g, 500 g, 1000 g) on the sensors to see how accurate they were.
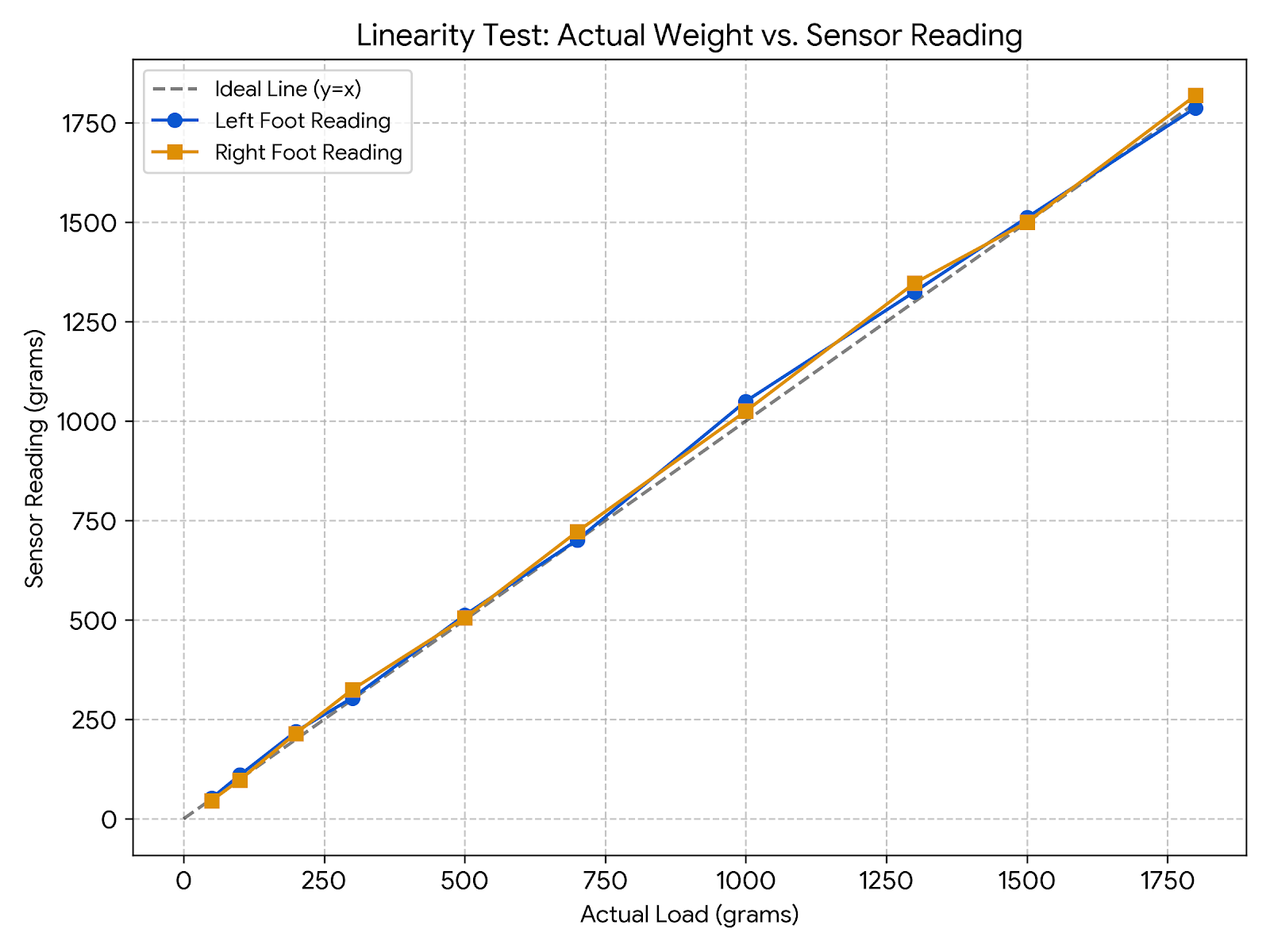
- Foot pressure behavior:
- They checked how the sensors behaved as the load increased from 0 to 1800 g, making sure the readings increased steadily and predictably.
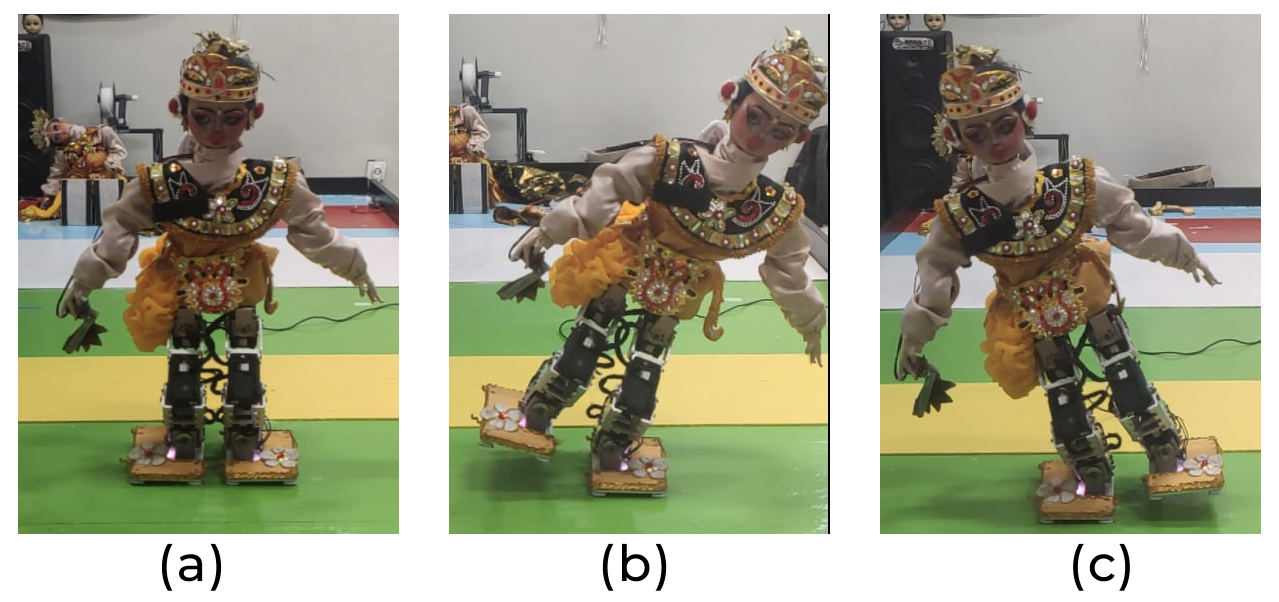
- Real robot balance:
- The robot tried lifting one foot while standing on a board tilted by 3 degrees.
- They compared two cases: with the PID balance controller turned on vs. turned off.
- They experimented with different PID settings to see which ones worked best.
What did they find, and why does it matter?
Here are the key results:
- The sensors were accurate enough:
- Average error was about 14.8 grams per foot on the whole system, and each load cell error was usually within 0–19 grams. That’s good for tracking balance.
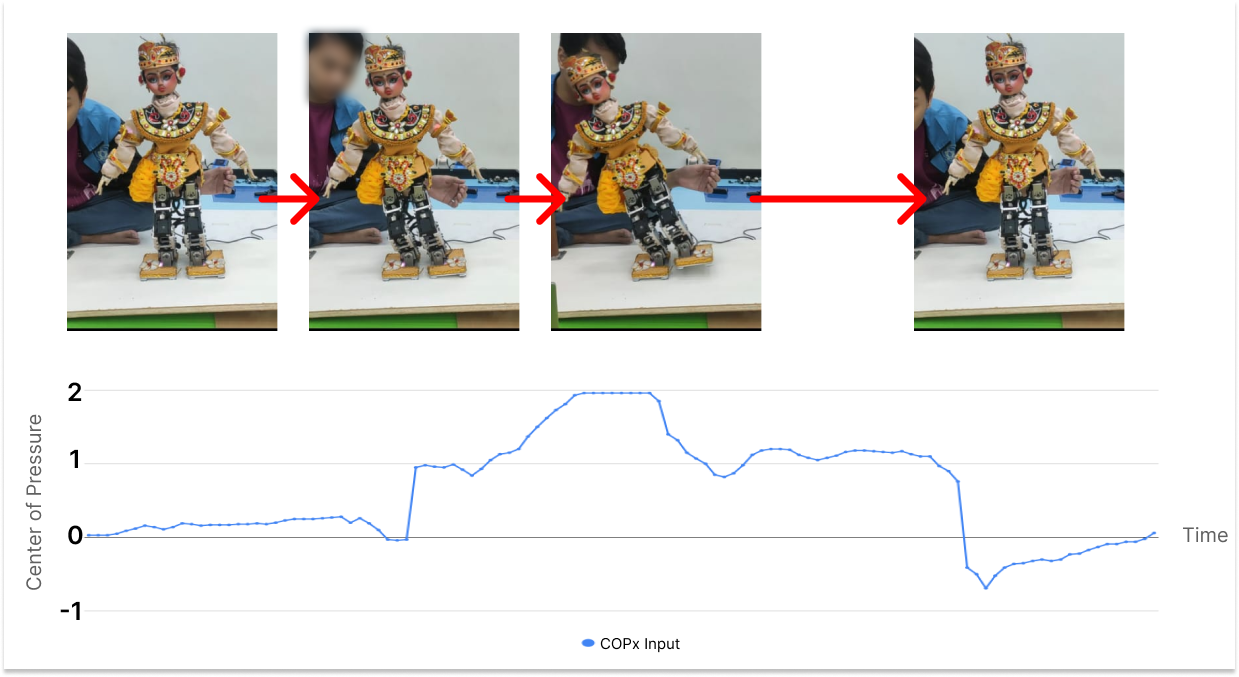
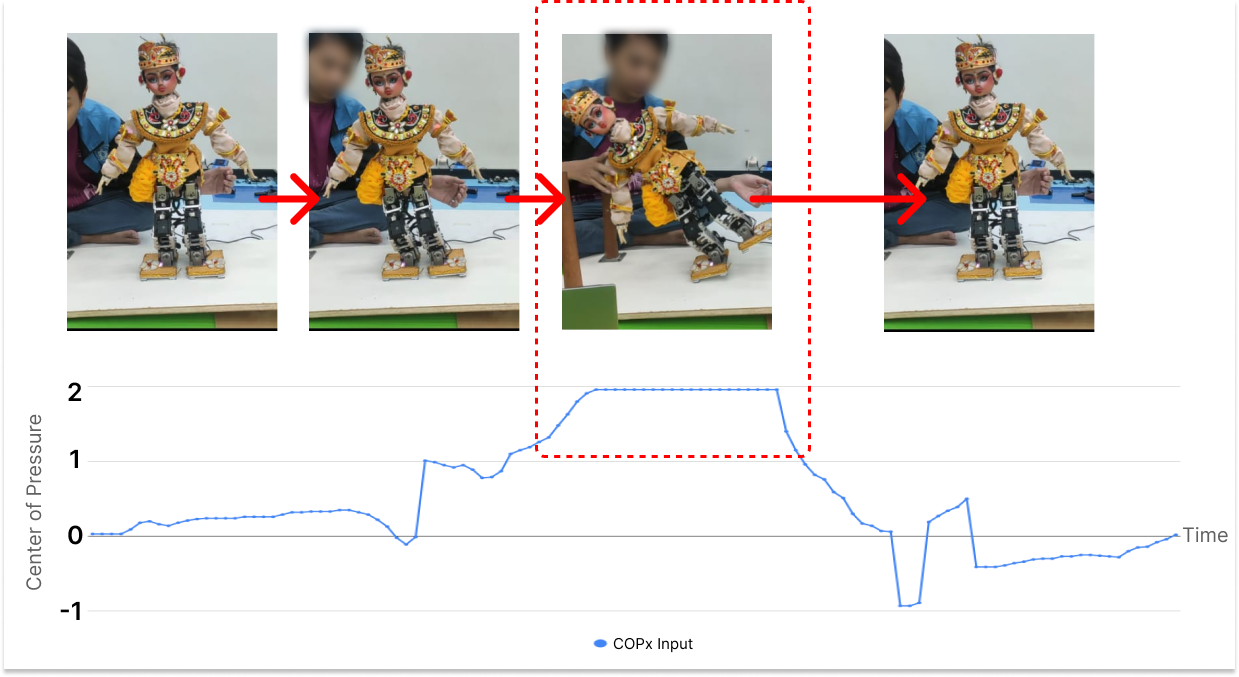
- The CoP readings made sense:
- When the robot lifted its right foot, the CoP moved clearly onto the left foot, and vice versa. This showed the feet sensors were measuring what was really happening.
- The wireless system worked well:
- The ESP32‑C3 in each foot sent data reliably to the main controller, reducing messy wiring that can restrict movement in a dancing robot.
- The controller kept the robot from falling:
- With the best settings (Kp = 0.10, Kd = 0.005), the robot stayed balanced 100% of the time while lifting one foot on a 3-degree tilt.
- Without the controller, the robot fell.
- Tuning tips:
- Kp (how strongly it reacts) around 0.10 worked best. Too high made it overreact and wobble more.
- Ki (fixing small long-term errors) didn’t help much here and could sometimes make performance worse.
- Kd (smoothing the motion) helped at small values, but too much made the robot jitter because it amplified tiny sensor noise.
Why this matters:
- Many robots use body motion sensors (like gyroscopes) but can’t “feel the ground” well. These foot sensors give direct information about how the robot’s weight is distributed on the floor, which is especially helpful on uneven surfaces.
- The wireless design keeps the robot flexible and reduces cable problems—important for robots that need a wide range of motion, like dancers.
What could this lead to?
- More stable humanoid robots that can handle real-world floors, not just flat lab surfaces.
- Better performance in activities that require precise balance, like walking, dancing, and sports.
- Future upgrades:
- Stronger joints for balance control (e.g., swapping in more powerful servos).
- Using the CoP to compute ZMP (Zero-Moment Point), another well-known balance measure in robotics, for even better stability.
- Combining these foot sensors with body motion sensors for a smarter, more robust balance system.
- Extending tests beyond 3-degree tilts and into faster, more dynamic moves.
In short: The team built a “smart, wireless shoe” for a humanoid robot, used it to watch where the robot’s weight is pressing on the ground, and then gently adjusted the robot’s body to keep it balanced. It worked so well that the robot could stand on one foot on a tilted surface without falling—even while keeping its movements free and graceful for dancing.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
The following list captures what remains missing, uncertain, or unexplored in the paper, framed as concrete, actionable items for future research.
- Quantify wireless communication latency, jitter, packet loss, and their impact on closed-loop stability; report end-to-end CoP-to-servo delay and its variability under Wi‑Fi contention.
- Evaluate time synchronization across foot modules and the main controller (clock drift, timestamping), and its effect on CoP fusion accuracy when both feet are in contact.
- Increase the sampling/update rate beyond 20 Hz (50 ms) and characterize how controller performance varies with loop frequency; establish minimum viable control bandwidth.
- Provide precise CoP coordinate definitions (units in mm) and foot frame transformations instead of normalized scales (X: −2 to 2, Y: −1 to 1); include foot geometry and sensor positions to enable reproducible mapping.
- Correct and fully specify the CoP and PID equations (several in-paper equations are malformed), including all variables, units, and computational steps to ensure replicability.
- Characterize load cell nonlinearity, hysteresis, creep, and temperature drift across the full operating range; replace single-point (50 g) gradient estimation with multi-point calibration and model-based correction (e.g., polynomial, piecewise linear).
- Test spatial CoP accuracy by applying known loads at multiple locations across the foot pad; quantify cross-talk between load cells and the spatial resolution of the CoP estimate.
- Implement and benchmark signal conditioning (e.g., low-pass or complementary filters, “dirty derivative,” or Kalman filtering) to mitigate noise amplification in the derivative term; compare filtered vs. unfiltered PID performance.
- Combine CoP with inertial sensing (IMU) and evaluate sensor fusion strategies (e.g., complementary/Kalman filters) to improve robustness on uneven terrain and during dynamic motions.
- Extend testing beyond static single-leg lift at 3° tilt: assess performance during dynamic walking, turning, dance sequences, foot transitions (heel–toe), and varying step cadences.
- Determine the maximum slope/inclination and surface irregularity (e.g., bumps, gaps) the system can tolerate before failure; map stability margins across a range of angles and terrains.
- Conduct controlled external-perturbation experiments (push recovery) to quantify disturbance rejection and the limits of balance under impulsive and sustained forces.
- Evaluate frictional variability and slip resilience (different floor materials, contaminants, and anti-slip pad conditions); integrate slip detection and mitigation strategies.
- Define robust contact state detection (stance vs. swing) and how CoP fusion is handled when a foot is unloaded; add thresholds and state-machine logic to avoid using swing-foot data.
- Report mechanical and electrical details required for replication: load cell model and bridge configuration, instrumentation amplifier/ADC (e.g., HX711 or equivalent), resolution, sampling scheme, and power conditioning.
- Analyze servo actuation limits (torque margins, saturation, speed, thermal behavior) under balancing tasks; quantify how servo characteristics constrain achievable stability.
- Assess the contribution of each joint to balance (torso/hip/ankle roll gains) via sensitivity analysis and optimization; compare empirical gain selection to systematic methods (e.g., LQR/MPC, gain scheduling).
- Provide formal closed-loop stability/robustness analysis (step response, settling time, overshoot, frequency response, stability margins) instead of relying solely on success/fall counts and RMS error.
- Investigate automatic PID tuning methods (relay autotuning, Ziegler–Nichols variants, Bayesian optimization) and adaptive/robust control to handle model and environment variations.
- Compare wireless CoP feedback to tethered or bus-based alternatives (e.g., RS-485, CAN) in terms of reliability, latency, mechanical freedom, and noise susceptibility.
- Quantify energy consumption and runtime impact of the wireless foot modules; evaluate battery life trade-offs vs. sampling rate and radio duty cycling.
- Test long-duration reliability (hours of operation) and drift, including repeated cycles with costume loads; examine whether calibration or performance degrades over time.
- Explore integration of CoP with model-based balance control (e.g., ZMP/LIPM preview control, MPC) and quantify gains vs. PID-only approaches.
- Establish statistical rigor: increase trial counts, report confidence intervals, effect sizes, and significance tests for success rates and RMS errors; include inter-trial variability and environmental covariates.
- Evaluate generalizability across different humanoid platforms and foot geometries; quantify how performance scales with robot mass, height, and DoF configurations.
- Document network topology (AP vs. peer-to-peer), radio settings, and security/encryption, and assess robustness to RF interference typical of competition venues.
Practical Applications
Immediate Applications
Below are specific, deployable use cases that can be adopted now, along with sectors, likely tools/products/workflows, and key assumptions or dependencies.
- Wireless CoP foot module retrofit for humanoid robots; sector: robotics. Product: plug-and-play footplates with four load cells and an ESP32-C3 per foot; workflow: browser-based GUI calibration, Wi‑Fi pairing to ESP32 main controller, PID setup. Assumptions/dependencies: robot has roll-control servos and Dynamixel-compatible firmware; reliable 2.4 GHz Wi‑Fi in the arena; effective only for mild inclines and semi-static tasks similar to the 3° single-support test.
- Balance stabilization in robotics competitions (dance, soccer); sectors: entertainment, education. Tools: PID parameter presets (e.g., Kp=0.10, Kd=0.005), joint gain mapping (hip 1.0, torso 0.8, ankle 0.4) to avoid overshoot and foot lift-off. Assumptions/dependencies: comparable 29‑DoF architectures; consistent CoP scaling; costumes or attachments do not significantly alter foot contact mechanics.
- Academic lab platform for CoP-driven balance control studies; sector: academia. Workflow: reproducible experiments using 50 ms sampling, CoP visualization, error/RMS tracking for parameter sweeps. Assumptions/dependencies: load cell calibration quality (avg error ~14.8 g per cell, ~50 g total foot), controlled ground surfaces, access to ESP32‑C3 hardware.
- Undergraduate/graduate teaching modules and capstone projects; sector: education. Product: course kit and lab practical using wireless foot sensors, ESP32 firmware, and GUI-based calibration; learning outcomes: understanding CoP, PID tuning, servo compensation strategies. Assumptions/dependencies: campus Wi‑Fi stability; availability of microcontrollers and basic 3D printing.
- Robot posture diagnostics and fall‑risk monitoring; sector: robotics. Tool: CoP telemetry dashboard with thresholds for “support polygon exit” and time-to-fall estimation; workflow: alerting when X‑axis CoP approaches limits during single-support tasks. Assumptions/dependencies: accurate CoP scaling; synchronized telemetry; minimal packet loss on Wi‑Fi.
- Cable‑free foot sensing in constrained‑movement systems; sector: industrial automation. Product: wireless, sensorized footpads reducing wire harnessing, mechanical noise, and snags (e.g., robots in costumes or tight workcells). Assumptions/dependencies: EMI control; battery or power routing within foot enclosures; mechanical durability of 3D-printed shells and anti-slip pads.
- Open-source firmware templates for CoP‑based PID balance; sector: software. Tools: code patterns for CoP error computation, servo compensation, and tuning guides (including caution on derivative noise). Assumptions/dependencies: access to Dynamixel SDK or equivalent servo API; standardized messaging between foot ESP32‑C3 and main ESP32.
- Manufacturing and supply of anti-slip, sensorized footpads; sector: hardware. Product: ruggedized foot assemblies with integrated pads and protective enclosures; workflow: factory calibration with stored EEPROM coefficients. Assumptions/dependencies: load ranges suitable for target robot weights; wear resistance and repeatability of mechanical pads.
- Rapid PID tuning workflow for static single‑support stability; sector: robotics/software. Workflow: systematic sweeps of Kp and Kd ranges with RMS error minimization to reach the “no fall” envelope. Assumptions/dependencies: start with static tasks; derivative term kept low to avoid sensor noise amplification; surface consistency.
- Immediate sensor fusion with IMUs for better balance margins; sector: robotics R&D. Workflow: combine CoP with inertial sensors (e.g., MPU6050) for enhanced disturbance rejection. Assumptions/dependencies: time synchronization between CoP and IMU; basic complementary/Kalman filtering.
Long-Term Applications
These use cases require further research, scaling, hardware upgrades, or development beyond the conditions tested in the paper.
- ZMP-based balance control built on CoP; sector: robotics. Product: ZMP estimator and controller module that leverages CoP; expected benefit: improved robustness during dynamic motions. Assumptions/dependencies: accurate dynamic modeling, higher-rate sensing/actuation, servo upgrades (e.g., MX‑64T), more precise time synchronization.
- Dynamic walking and uneven terrain locomotion; sector: robotics. Workflow: extend from static single-support at 3° to dynamic gait over irregular surfaces; integrate LIPM/MPC planning. Assumptions/dependencies: higher torque at ankle/hip, faster control loops, robust contact detection, and terrain estimation.
- Service humanoids in retail and healthcare; sectors: retail, healthcare. Product: balance controller stack for customer-facing robots (e.g., receptionists, aides) to handle minor slopes, crowd-induced disturbances. Assumptions/dependencies: safety certification, robust hardware against long-duty cycles, interference management in crowded RF environments.
- Exoskeletons and prosthetics with wireless CoP sensing; sector: healthcare. Tools: wearable insoles with load cells transmitting CoP to control systems for balance assistance. Assumptions/dependencies: medical-grade reliability, low-latency links, comfort and power constraints, clinical trials and regulatory approval.
- Adoption in quadruped/biped platforms; sector: robotics. Product: multi-foot CoP arrays enabling distributed contact sensing across legs. Assumptions/dependencies: multi-channel radio synchronization, ruggedized enclosures, high-impact resistance for outdoor or industrial environments.
- Fleet telemetry and cloud analytics for balance events; sector: software/cloud. Tools: dashboards, anomaly detection, and predictive maintenance based on CoP/RMS error trends. Assumptions/dependencies: secure connectivity, streaming standards, privacy and cybersecurity compliance, scalable data pipelines.
- Auto‑tuning and learning‑based balance controllers; sector: software/AI. Product: autotuner leveraging RMS/error metrics, or RL-based policies initialized via PID; benefit: reduced manual tuning time. Assumptions/dependencies: safe exploration policies, dataset curation, edge compute on microcontrollers or low-power SoCs.
- Standards and policy for robot foot contact sensing; sector: policy. Output: guidelines on load-cell placement, calibration procedures, wireless resilience, fail-safes for fall prevention. Assumptions/dependencies: community consensus, multi-institutional validation, alignment with safety bodies.
- Human–robot physical interaction tasks requiring force awareness; sector: robotics. Tools: torque-based balancing augmented by CoP for tasks like patient handling or collaborative assembly. Assumptions/dependencies: high-rate force/torque sensors, compliant control strategies, safety interlocks.
- Disaster response robots navigating debris; sector: public safety. Product: rugged footpads with wireless CoP for stability on rubble. Assumptions/dependencies: shock/vibration-proof hardware, mesh networking, environmental sealing, extended battery life.
- Consumer home robots with improved balance on uneven floors; sector: consumer robotics. Product: balance kit integrated into home service robots for thresholds and carpets. Assumptions/dependencies: cost reductions, miniaturization, quiet actuation, user-safe behavior.
- Energy‑aware balance control; sectors: energy, robotics. Workflow: optimize servo actuation patterns using CoP to minimize energy consumption during stance adjustments. Assumptions/dependencies: detailed energy models, co-optimization of motion planning and control, hardware capable of regenerative braking or energy feedback.
Glossary
- Center of Mass (CoM): The point representing the average location of a robot’s mass, crucial for assessing lateral stability. "A higher gain is assigned to the hip roll joints () because they have the most significant influence on shifting the robot's Center of Mass (CoM) laterally."
- Center of Pressure (CoP): The location of the resultant ground reaction force under the foot, computed from load cells and used for balance control. "The system utilizes a custom-designed foot unit integrated with four load cells and an ESP32-C3 microcontroller to estimate the Center of Pressure (CoP) in real time."
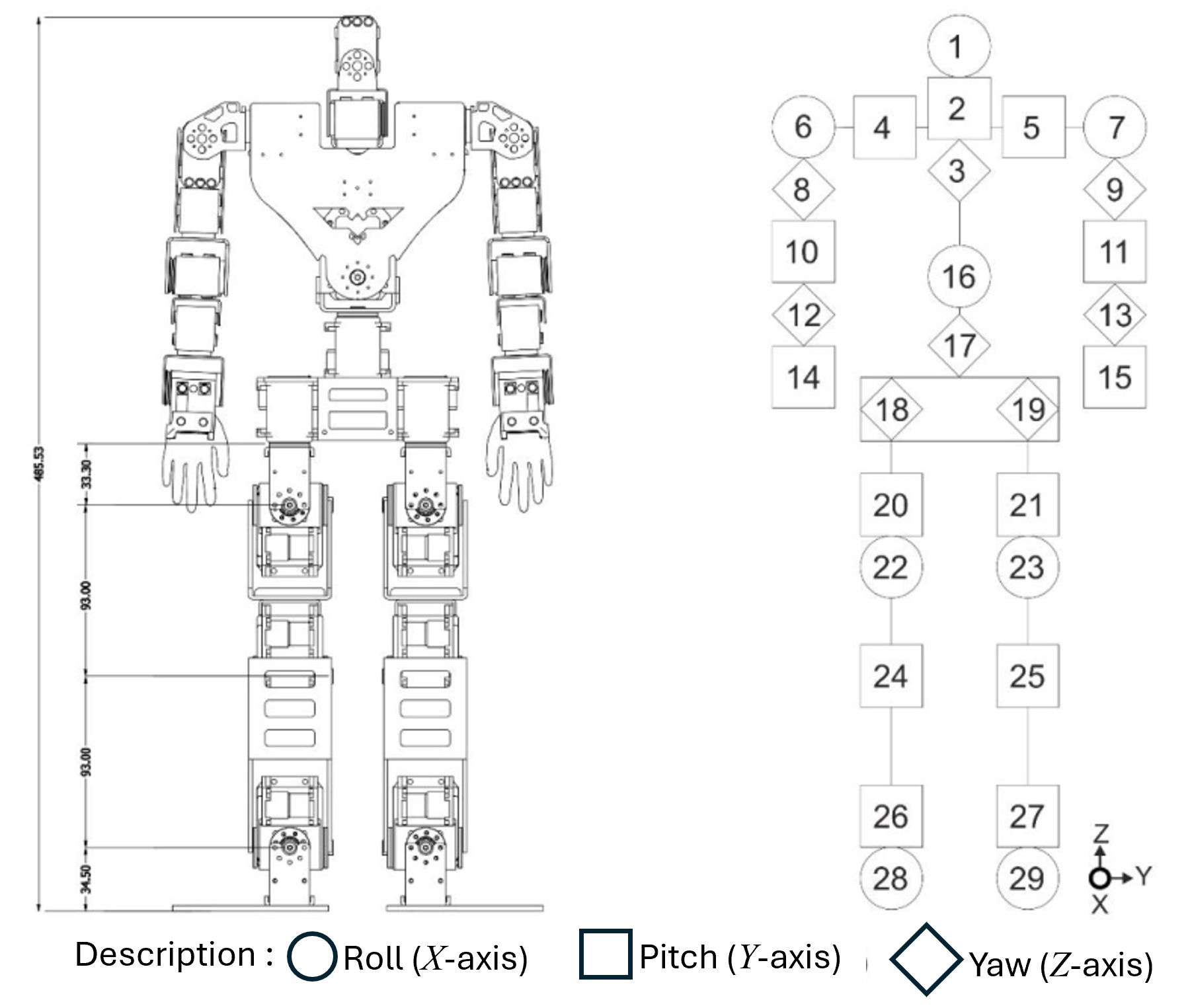
- Degrees of Freedom (DoF): The number of independent joint axes that can move in a robot. "The humanoid robot design encompasses 29 degrees of freedom (DoFs)."
- Derivative Gain (Kd): The coefficient in PID control that multiplies the rate of change of error to dampen oscillations. "optimized PID parameters (Kp=0.10, Kd=0.005)"
- Dynamixel: A family of serially controlled servo actuators by Robotis, widely used in robotics. "We employed a communication system in conjunction with Dynamixel motors \cite{dynamixel_system}, manufactured by Robotis, South Korea"
- EEPROM: Non-volatile memory used to store configuration data that persists after power-off. "This application saves configuration data to the EEPROM memory of the microcontroller"
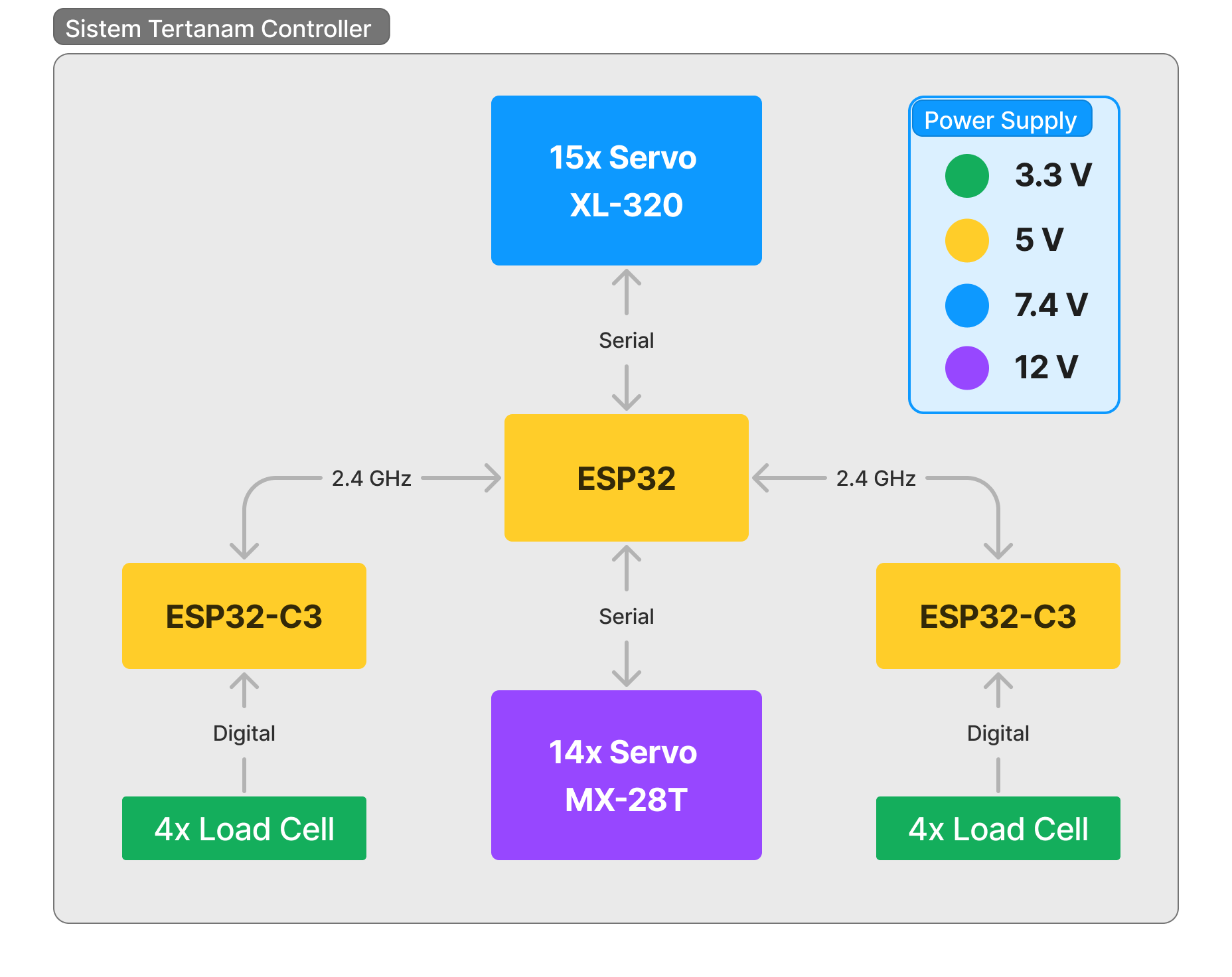
- Embedded system: A dedicated computing system integrated within hardware to perform control and data acquisition tasks. "This system uses an embedded system consisting of ESP32 and ESP32-C3 microcontroller units."
- ESP32-C3: A Wi‑Fi-enabled microcontroller used for wireless sensing and communication on the robot’s foot. "ESP32-C3 is used for data acquisition from the load cell and sends it to the ESP32."
- Integral Gain (Ki): The coefficient in PID control that multiplies the accumulated error to remove steady-state offset. ""
- Inertial sensors: Sensors such as gyroscopes and accelerometers that measure motion and orientation but not contact forces. "This is because inertial sensors cannot directly measure how weight is distributed"
- Kalman Filter: A recursive estimator used to fuse noisy sensor measurements for more accurate state estimation. "implemented Load Cell sensors, Kalman Filter, and PID Controller"
- Load cell: A force sensor that converts applied load into an electrical signal, enabling measurement of weight and pressure distribution. "Each robot foot is equipped with 4 load cells"
- MX-28 servo: A Robotis Dynamixel servo model used for precise actuation in the robot’s lower body. "14 MX-28 servos"
- PID controller: A feedback control algorithm combining proportional, integral, and derivative terms to reduce error. "A PID control strategy is implemented to adjust the torso, hip, and ankle roll joints based on CoP feedback."
- Proportional Gain (Kp): The coefficient in PID control that multiplies the present error to generate corrective action. ""
- Root Mean Square (RMS): A statistical measure of average magnitude used to quantify error in system responses. "Root Mean Square (RMS) error values."
- Setpoint: The desired target value that the control system aims to achieve or maintain. "The error value was obtained from the difference between and ."
- Single-support phase: The gait phase during which only one foot is in contact with the ground. "Maintaining stability during the single-support phase is a fundamental challenge in humanoid robotics"
- Tare weight: The zeroing offset used to calibrate a scale to read zero with no load. "the constant was obtained from the tare weight (zero point when the load cell had no load)"
- XL-320 servo: A compact Robotis servo model used in the robot’s upper body for fine movements. "15 XL-320 servos"
- Zero-Moment Point (ZMP): The point on the ground where the net tipping moment is zero, used as a stability criterion in biped locomotion. "using the Center of Pressure (CoP) data to determine the zero-moment point (ZMP) could help improve the robot's balance accuracy."
Collections
Sign up for free to add this paper to one or more collections.