- The paper introduces a novel convex CLF approach for synthesizing explicit piecewise-affine feedback controllers robust to uncertainties in nonlinear systems.
- It employs configuration-constrained polyhedral approximations to enforce a dissipative inequality linked to the infinite-horizon HJB equation, guaranteeing closed-loop performance.
- Real-time feasibility and scalability are demonstrated via numerical validation on a constrained Van der Pol oscillator under bounded disturbances.
Feedback Synthesis for Nonlinear Systems via Convex Control Lyapunov Functions
Overview and Motivation
This work introduces a mathematically rigorous, optimization-based methodology for synthesizing explicit piecewise affine (PWA) feedback controllers for constrained, uncertain, nonlinear discrete-time systems. The framework is predicated on generalized convex control Lyapunov functions (CLFs), designed through configuration-constrained polyhedral approximation. By enforcing these approximations to satisfy a dissipative inequality related to the infinite-horizon min-max Hamilton–Jacobi–Bellman (HJB) equation, the method certifies both robustness and closed-loop performance. The explicit controller architecture enables predictable memory and runtime characteristics, facilitating certified real-time implementation for economically relevant nonlinear systems.
Theoretical Foundations
Generalized Control Lyapunov Functions
Classical CLF theory provides sufficient conditions for stabilizing feedback synthesis in both linear and nonlinear systems—typically requiring the supply rate to be positive definite. This work generalizes the CLF notion by allowing a drift parameter d∈R, thereby treating the dissipation inequality,
M(x)+d≥u∈Uminw∈Wmax[L(x,u)+IX(x)+M(f(x,u)+w)]
for convex and radially unbounded M(⋅). This generalization supports economic performance objectives where average cost bounds replace traditional stability notions. Notably, the drift parameter d can be optimized jointly with the CLF, strengthening closed-loop guarantees for a wider spectrum of nonlinear systems.
Configuration-Constrained Design
A key innovation is the parameterization of M(⋅) as a piecewise affine function whose epigraph is a configuration-constrained polyhedron. This restriction allows control law synthesis to be cast as a finite-dimensional nonlinear optimization problem with configurable complexity. The explicit CLF admits robust control invariance for arbitrary (though bounded) nonlinearities and input constraints. The convexification via configuration templates enables scalable CLF design suitable for high-dimensional systems.
Synthesis Optimization Procedure
The synthesis problem is formulated as a finite-dimensional nonlinear program optimizing the domain and drift of the CLF under vertex-wise dissipativity constraints. For a given polyhedral template, each vertex and associated control input must satisfy a robust inequality that accounts for system nonlinearities and stage cost nonconvexity. The computational complexity is modularly adjustable via template selection, allowing for pre-determined storage and runtime costs.
Upon solving the design problem, feedback laws are explicitly constructed by interpolating optimal vertex controls, guaranteeing feasibility and robustness for all admissible states and uncertainty realizations. The ergodic performance bound is directly obtained from the drift parameter.
Numerical Results: Van der Pol Oscillator
The framework's efficacy is demonstrated on a constrained Van der Pol oscillator subject to bounded disturbances. The nonlinear dynamics are discretized via fourth-order Runge-Kutta, and constraints on state and inputs ensure feasibility under all disturbance scenarios. The corresponding stage cost is quadratic, and all system and cost assumptions for CLF synthesis are verified.
A highly refined polyhedral template ($576$ vertices, $265$ regions) is employed, and the synthesis problem is solved in two stages—maximizing the domain and minimizing the drift. The resulting PWA CLF (d⋆=0.1) yields an explicit feedback control law, verified in simulation to robustly steer closed-loop trajectories to a control-invariant set near the origin for all disturbance realizations.
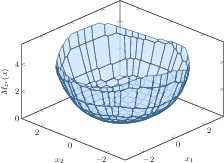
Figure 1: Piecewise affine generalized control Lyapunov function Mz⋆ constructed for the Van der Pol oscillator.
The partition of the operational domain and the induced trajectories under worst-case disturbances are visualized, showing robust regulation within the admissible state set.
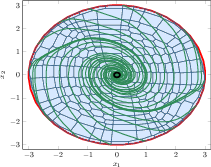
Figure 2: Partition of dom(Mz⋆) and sample closed-loop trajectories for randomized disturbance sequences.
The explicit affine control law derived from the optimal vertex controls ensures constraint satisfaction and computational determinism.
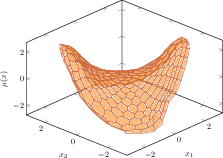
Figure 3: Piecewise affine feedback law μ generated via interpolation over the polyhedral domain.
Implications and Future Perspectives
The principal implications of this research are:
- Performance Certification: The synthesized feedback laws admit a priori certification of ergodic performance and robustness due to the dissipativity constraints and explicit bounds on average stage cost.
- Real-Time Feasibility: All computationally intensive synthesis is performed offline; online implementation is reduced to region identification and affine interpolation, with deterministic runtimes.
- Scalability and Configurability: The approach supports arbitrary user-specified complexity via template selection, enabling deployment on hardware-constrained platforms and for systems with large operational domains.
- Explicit Nonlinear Synthesis: Unlike classical explicit MPC (limited to linear systems and quadratic Lyapunov functions), this framework encompasses generic nonlinear dynamics and stage costs, extending applicability to advanced nonlinear control settings.
Potential future developments include extending the method to economic model predictive control, accommodating stochastic uncertainties, and scaling to systems with higher state dimension using advanced polyhedral computation techniques and fast template generation. The theoretical machinery may also inform operator-theoretic control and data-driven Lyapunov analyses.
Conclusion
The paper establishes a robust, theoretically founded framework for explicit nonlinear feedback synthesis via generalized, convex, configuration-constrained control Lyapunov functions. The resultant methodology is practically viable for real-time constrained nonlinear control and certifies both closed-loop robustness and economic performance. The experimental validation on a Van der Pol oscillator exemplifies its practical relevance and applicability. This work provides a pathway towards scalable, certifiable, and explicit controller architectures for complex nonlinear systems.
Reference: "Feedback Synthesis for Nonlinear Systems Via Convex Control Lyapunov Functions" (2512.11256)