- The paper presents a closed-form CBF-based safety controller that eliminates online QP optimization for the Stewart platform.
- It employs a smooth Log-Sum-Exp approximation to aggregate multiple position and velocity constraints into a composite safety filter.
- Experimental results demonstrate a 9× reduction in computation time while maintaining safe tracking under dynamic conditions.
Introduction
The paper "Design and Experimental Validation of Closed-Form CBF-Based Safe Control for Stewart Platform Under Multiple Constraints" (2512.11125) addresses the computational bottlenecks in safety-critical control of parallel robotic mechanisms, specifically the Stewart platform, under multiple simultaneous state and velocity constraints. Standard Control Barrier Function (CBF) approaches for multi-constraint handling generally require the online solution of Quadratic Programs (QPs), which is often computationally prohibitive for real-time systems, particularly those with embedded or resource-constrained hardware. This work derives and experimentally validates a closed-form CBF-based safety filter that systematically handles multiple position and velocity limits without runtime optimization, leveraging analytical formulations and smooth constraint composition techniques.
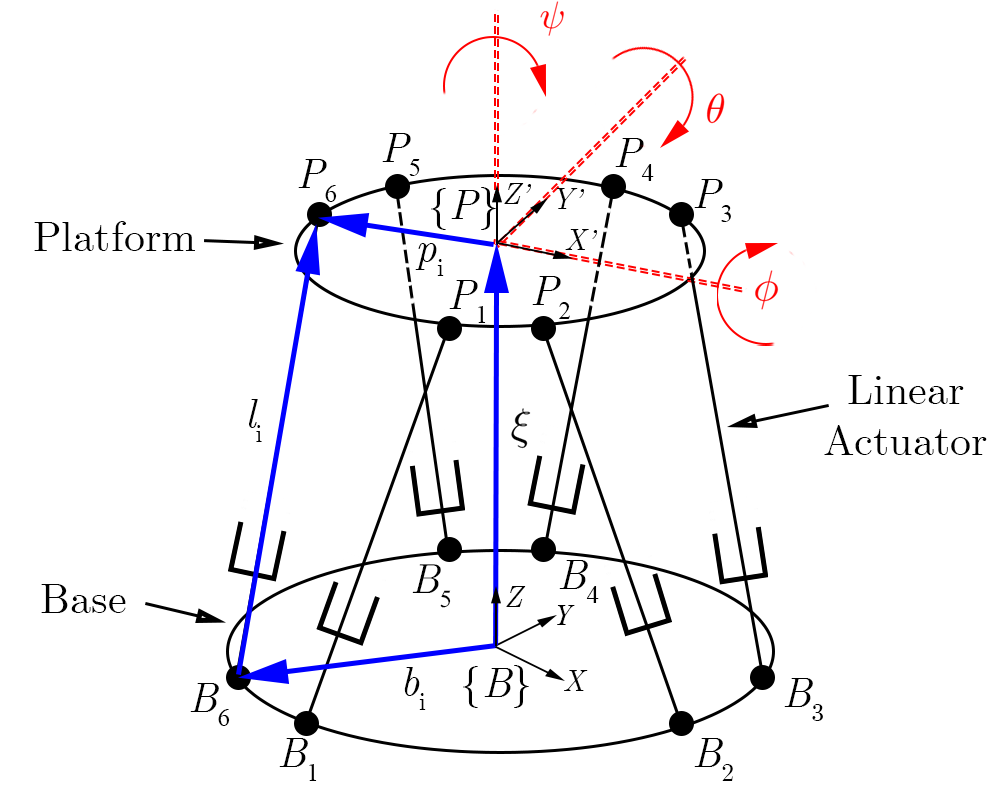
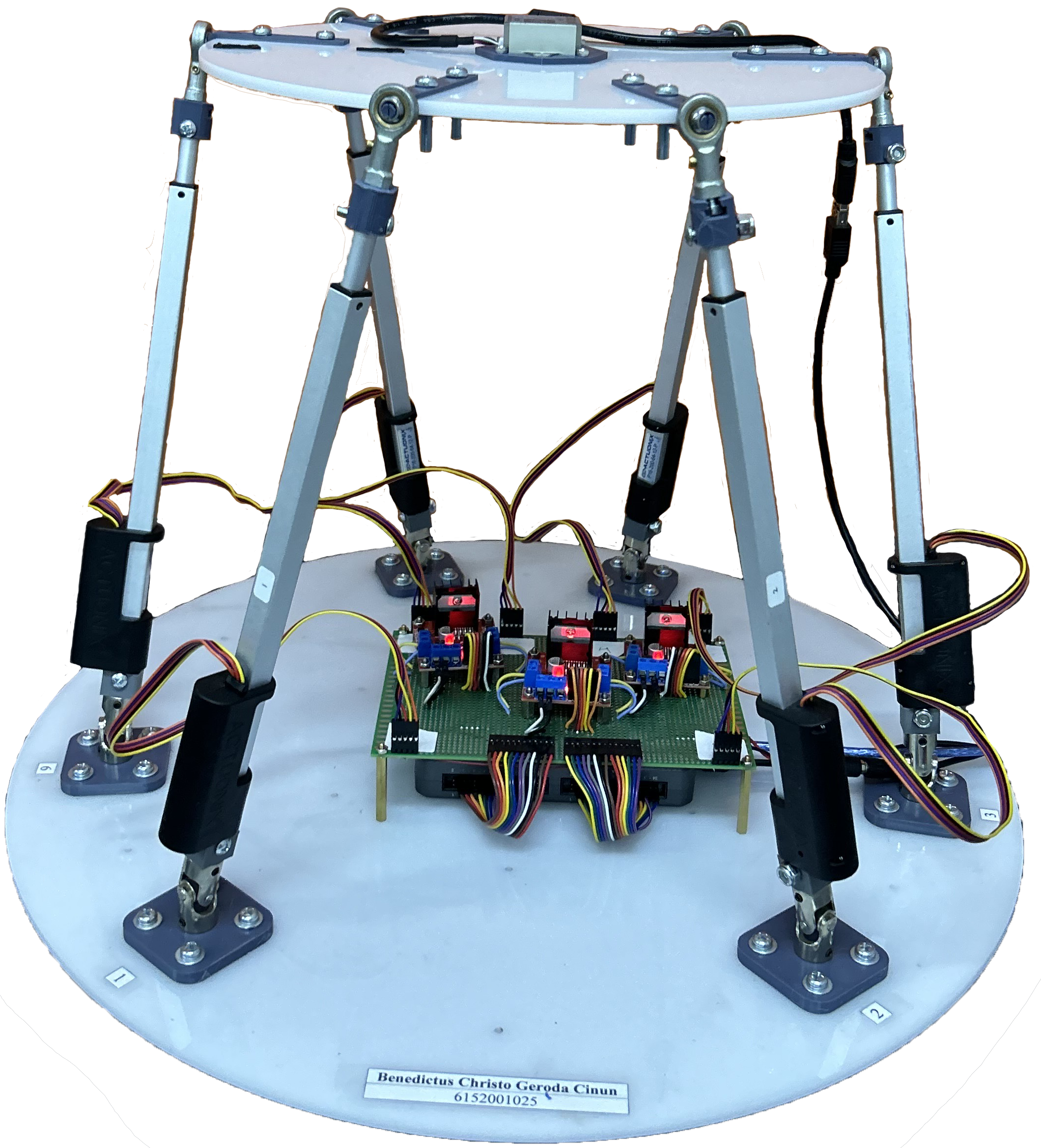
Figure 1: The schematic of the Stewart platform and a snapshot of its developed prototype, demonstrating the parallel kinematic structure.
The Stewart platform is a canonical 6-DoF parallel mechanism with strong inter-axis coupling and workspace restrictions. Its state vector x=[q⊤,q˙⊤]⊤∈R12 evolves according to the model:
M(q)q¨+C(q,q˙)q˙+G(q)=H(q)F,
where M, C, G, and H are the inertia, Coriolis, gravity, and Jacobian-related matrices, and F the actuator force vector. Safety is enforced through position and velocity limits formalized as sets:
SD=j⋂{(q,q˙): hD,j(q,q˙)≥0},Sv=k⋂{q˙: hv,k(q˙)≥0}
where hD,j are energy-based position CBFs (enforcing velocity-aware position safety) and hv,k are first-order velocity constraints.
A standard CBF-QP modifies a nominal tracking command Fdes by solving a constrained optimization at each control step. In the presence of multiple constraints and for high-rate or large-scale platforms, this real-time QP is a substantial bottleneck.
To circumvent the computational cost of QP solvers, the authors derive algebraic closed-form expressions for the safety filter. For the single-constraint case, they show that analytical expressions can be constructed for the minimum-norm input modification that enforces CBF conditions. The technical core expands this to the multi-constraint setting by aggregating CBFs using a differentiable Log-Sum-Exp (LSE) soft-min approximation, yielding composite CBFs:
hˉD=−β1logj∑e−βhD,j,hˉv=−β1logk∑e−βhv,k
where β tunes the approximation's sharpness.
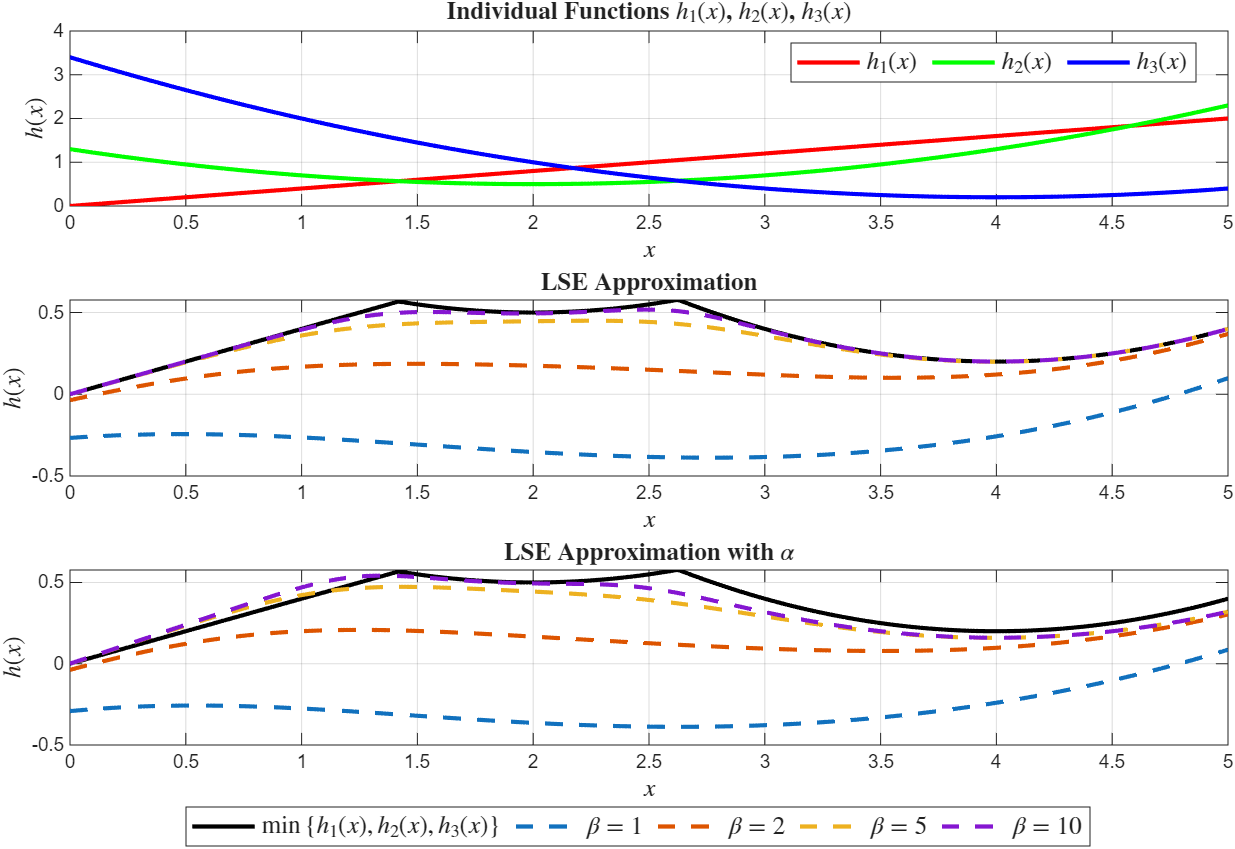
Figure 2: The LSE approximation provides a smooth and tunable surrogate for the min operator over CBFs, with β and α controlling sharpness and per-constraint scaling.
Differentiating these aggregate functions and evaluating at the nominal input leads to an explicit correction formula:
Fcf=Fdes+Fsafe
where Fsafe is given piecewise based on active constraints, with all matrix inverses and combinations analytically computable. The approach introduces necessary and sufficient conditions for nonsingularity of the resulting correction.
The framework allows per-constraint scaling for priority adjustment and further conditioning improvements. This yields a tractable safety filter with no per-step optimization; all required computations are differentiable and suitable for embedded implementation.
Figure 3: Architecture of the closed-form multi-constraint CBF controller. The CBF module filters the nominal input from trajectory tracking to produce safe actuator commands.
Simulation Results
Simulation validates the closed-form filter against a CBF-QP baseline and a naive (unsafe) controller. Representative scenarios involve the Stewart platform tracking multi-axis waypoints under strict position and velocity limits. For identical CBF parameters, the closed-form method achieves performance and safe set invariance equivalent to the QP baseline.
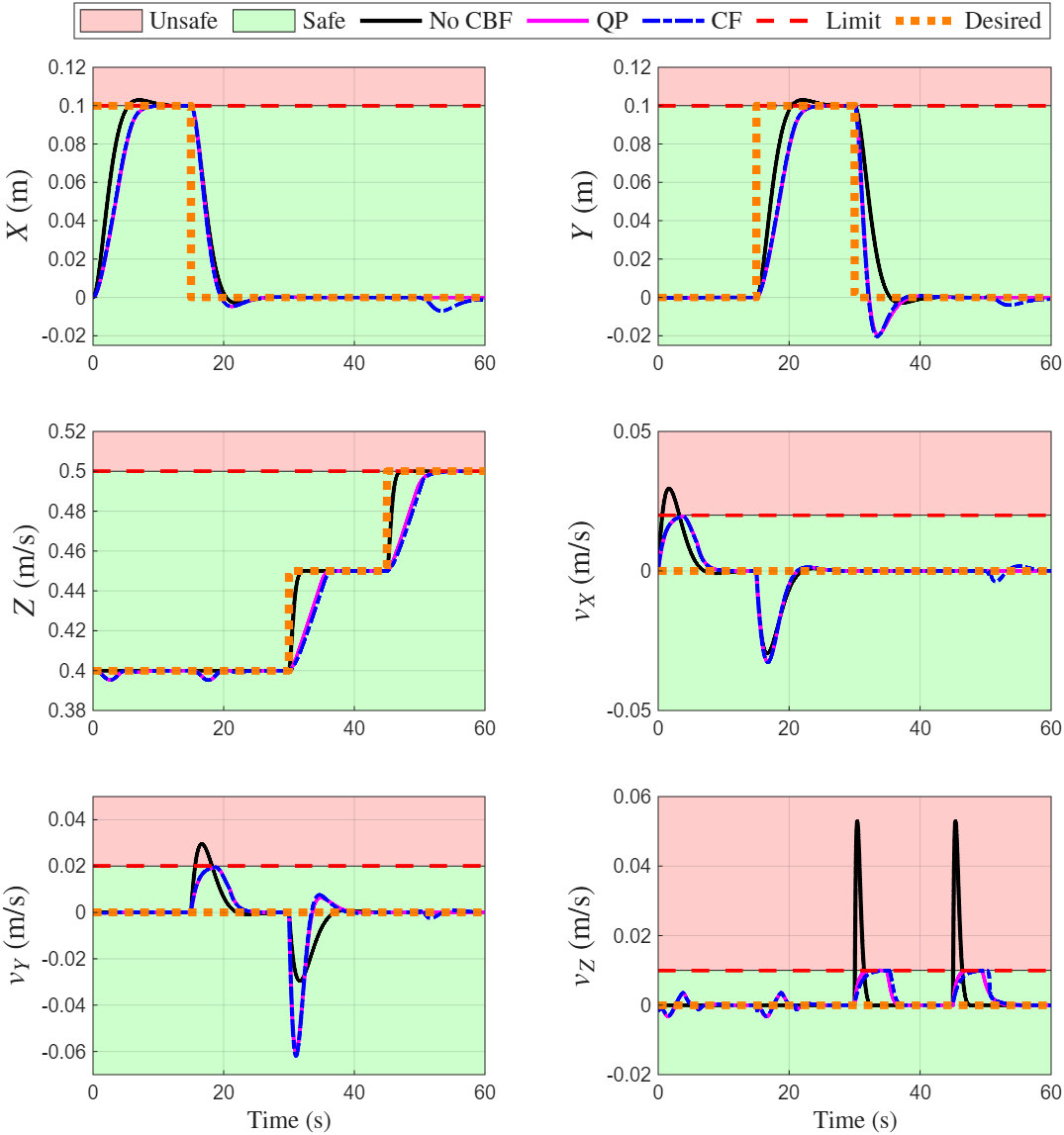
Figure 4: Simulation comparison of the baseline (no CBF), CBF-QP, and closed-form filter. The closed-form filter prevents constraint violation and tracks desired waypoints comparably to the QP, with computational savings.
Trajectories generated by the closed-form method respect all safety boundaries, while the baseline incurs violations during inter-axis transients. The CBF-based controllers adaptively trade tracking accuracy for constraint satisfaction near boundaries, highlighting correct handling of strong axis couplings.
Experimental Validation
A custom 6-DoF Stewart platform prototype demonstrates the approach's practical viability. The closed-form and QP-based CBFs deliver safety-equivalent tracking under real system disturbances and unmodeled dynamics, with both outperforming the nominal controller in constraint compliance.
Critically, the closed-form implementation achieves an average 9× reduction in control computation time during CBF-active periods compared to the QP-based approach (from $4.98$ ms to $0.58$ ms per step), substantiating suitability for hard real-time requirements and embedded architectures.
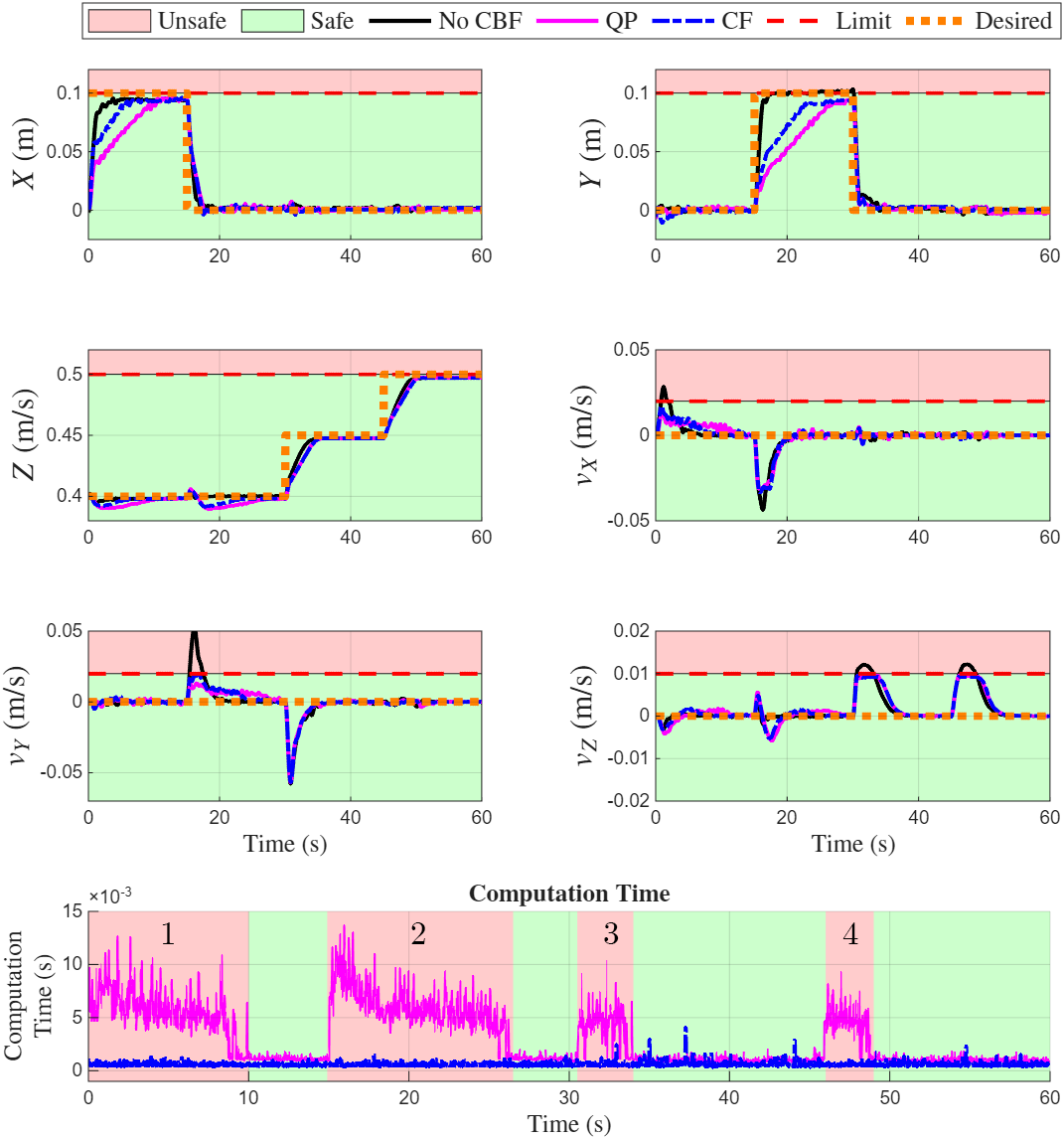
Figure 5: Experimental axis velocities and computation time traces. The proposed closed-form filter replicates QP-based safety enforcement but with an order-of-magnitude lower computational overhead, especially in active constraint regions.
Implications and Outlook
This work demonstrates that, for nonlinear parallel systems with multiple hard safety constraints, closed-form CBF-based controllers using composite smooth constraint aggregations can attain the functional envelope of QP-based CBFs at dramatically reduced computational cost. The general approach—constructing compatibility conditions and smooth surrogates for constraint sets—extends to other platforms with high coupling and input-state interactions.
The formal results establish analytic invertibility and compatibility conditions fundamental for practical real-time control law deployment. Experimentally, this validates direct application on hardware without the need for expensive optimization solvers, enabling reliable operation on cost- or resource-constrained platforms.
Future developments may include:
- Extending the closed-form synthesis to include actuator input constraints (e.g., saturations),
- Robustification against modeling errors or external disturbances,
- Systematic/adaptive tuning of safety filter parameters for optimal performance-safety tradeoff,
- Application to broader classes of high-DoF robotic systems and autonomous platforms with safety-critical missions.
Conclusion
A closed-form, computationally lightweight CBF-based controller capable of enforcing multiple simultaneous position and velocity constraints is developed and experimentally validated on a Stewart platform. By leveraging smooth constraint aggregation (LSE), explicit correction laws, and compatibility analysis, the proposed framework obviates the need for online QPs, yielding order-of-magnitude improvements in real-time viability without sacrificing safety guarantees or control performance. This result represents a substantial advance in scalable safe control synthesis for parallel robotic mechanisms.

