- The paper demonstrates that human timing differences in arm movements serve as effective cues to convey social impressions through robotic actions.
- It employs a controlled game setup to compare natural and intentionally exaggerated motion patterns, revealing significant phase-specific timing effects.
- Physical embodiment amplifies the interpretability of motion cues compared to video presentations, informing design improvements for collaborative HRI.
Expressive Robot-Arm Motion Design via Unconscious and Intentional Human Motion Cues
Introduction
The paper investigates the translation of human motion cues—both unconscious and intentional—into expressive robot-arm movements, focusing on the imperfect-information board game Geister as a controlled setting for analyzing intention communication through motion. The study systematically examines how timing parameters (movement speed and stop duration) in human arm movements can be leveraged to design robot motions that effectively convey intention and elicit specific social impressions from observers. The research further explores the impact of presentation modality (physical robot vs. video) on the interpretability of these cues.
Figure 1: Pieces and Board of the Simplified Geister Game.
Human Motion Analysis: Unconscious vs. Intentional Cues
Experimental Setup
Human wrist trajectories during piece manipulation were recorded using an RGB-D camera, with segmentation into six distinct phases: approach, grasp, lift, placement, pre-release stop, and withdrawal. Two experimental conditions were considered: natural gameplay (unconscious motion) and instructed expression (intentional cues).
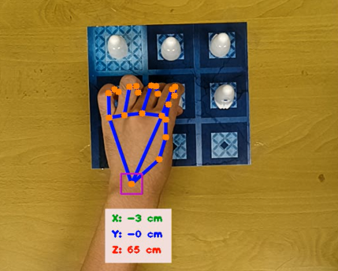
Figure 2: Example of Data Acquisition.
Unconscious Motion (Exp. 1-1)
Analysis of natural gameplay revealed subtle but statistically significant timing differences between blue (good) and red (evil) piece movements, particularly in the later phases. Blue-piece moves exhibited slower placement (p<.1), shorter pre-release stops (p<.05), and faster withdrawal (p<.1), suggesting implicit hesitation or confidence under risk. These cues, though weak, were consistent across participants.
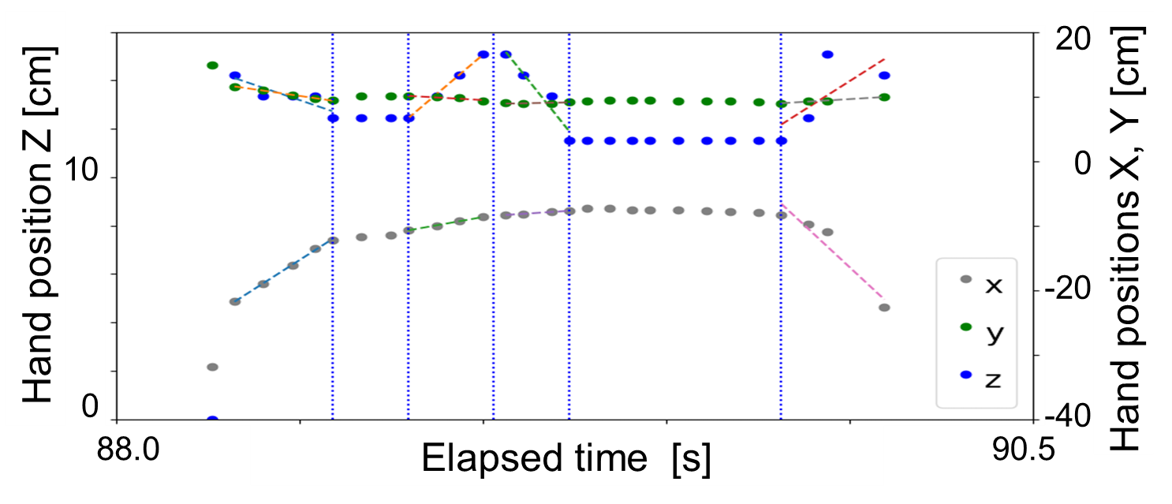
Figure 3: Representative wrist trajectory during game-piece manipulation. Six phases are demarcated, with timing differences observable in later phases.
Intentional Expression (Exp. 1-2)
When participants were explicitly instructed to express intention, phase-specific exaggerations in timing parameters emerged, albeit with high inter-individual variability. For example, most participants performed a faster approach for blue pieces and a longer stop for red pieces. These intentionally produced cues were more pronounced and interpretable than those observed in natural gameplay.
Robot Motion Design and Evaluation
System Configuration
A myCobot 280M5 robot arm was programmed to execute seven motion patterns, each varying timing parameters in a single phase based on human-derived cues. The spatial trajectory was held constant to isolate the perceptual effects of temporal variations.


Figure 4: Experimental Environments for Each Presentation Condition (physical robot and video).
Physical Robot Presentation (Exp. 2-1)
Direct observation of the robot revealed that phase-specific timing manipulations significantly affected observer impressions. Notable findings include:
- Faster approach (Phase 1) increased perceived confidence (p<.1)
- Longer pre-lift stop (Phase 2) increased perceived intelligence (p<.05)
- Faster placement (Phase 4) was judged as rushed (p<.1)
- Faster withdrawal (Phase 6) increased anthropomorphism (p<.1) and animacy (p<.05)
Video Presentation (Exp. 2-2)
When the same motions were presented via video, the effects on social impression (Godspeed subscales) were attenuated, with no significant differences at the subscale level. However, task-specific impressions persisted, such as increased perceived confidence with faster lifting and increased intention-to-be-captured with faster withdrawal.
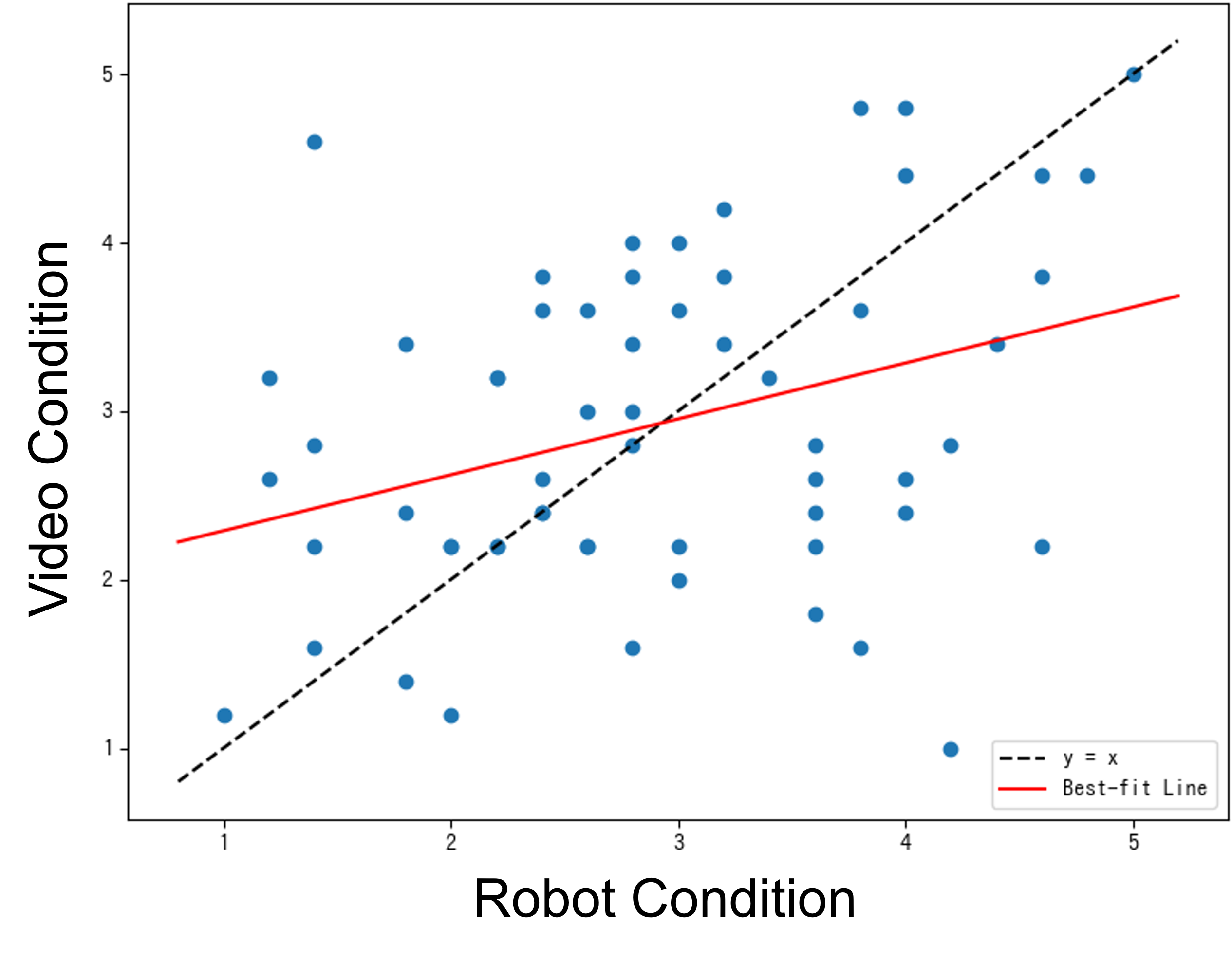
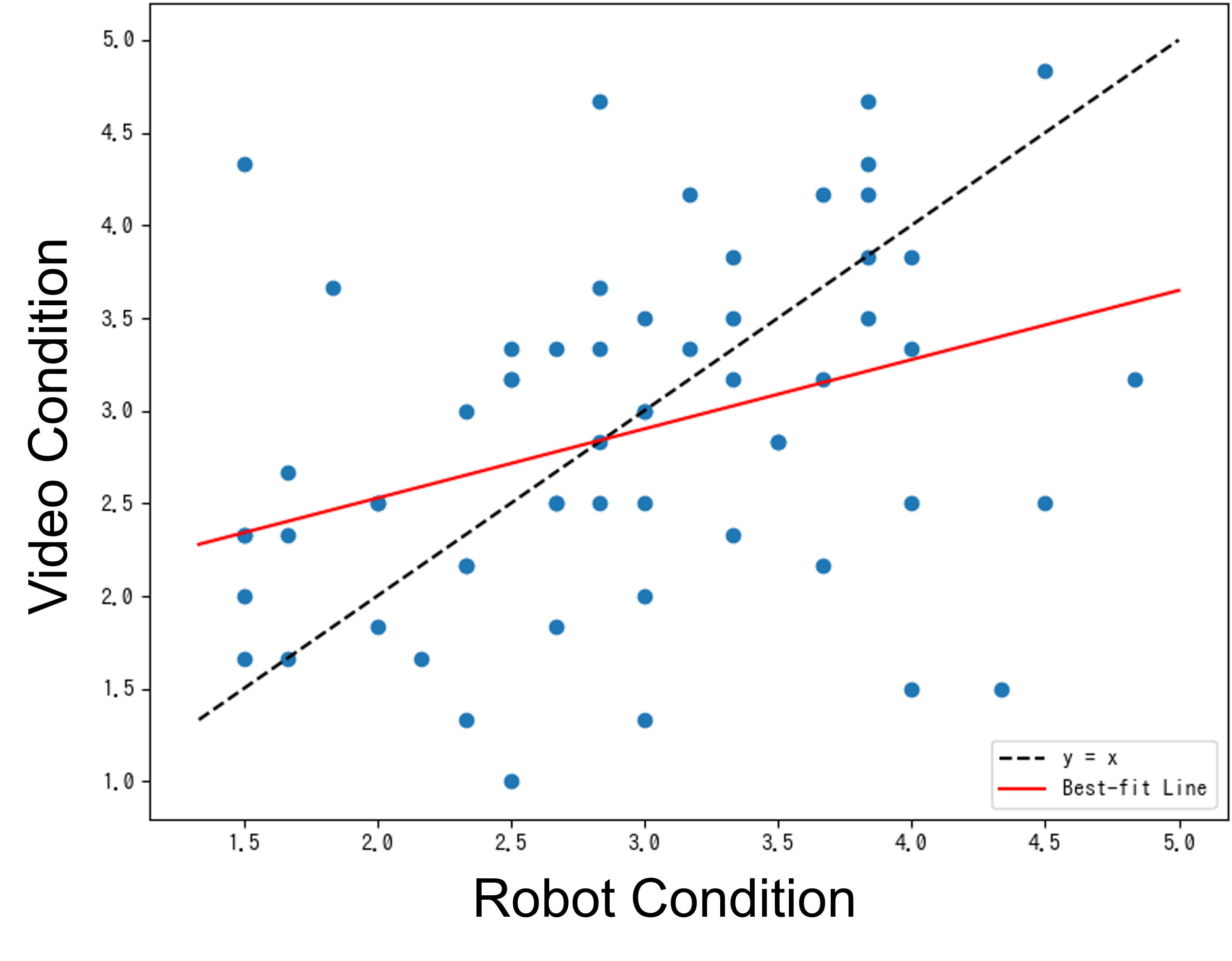
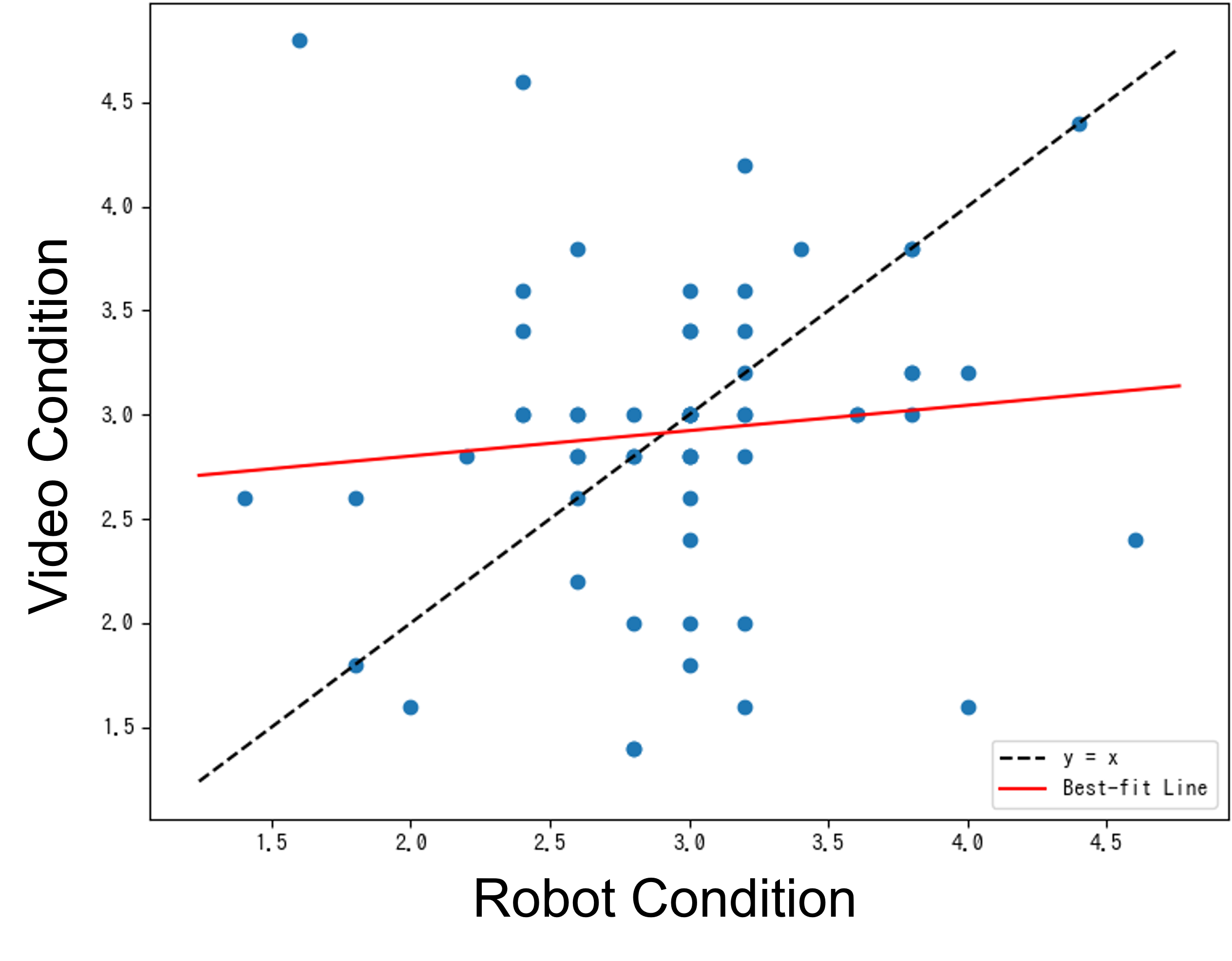
Figure 5: Distribution of GQS Scores in Robot and Video Presentation Conditions. Physical embodiment amplifies impression changes compared to video.
Discussion
Unconscious vs. Intentional Cues
Unconscious human motion patterns provide subtle, stable cues, but are often suppressed by strategic deception in imperfect-information games. Intentional expressions yield stronger, phase-specific signals, though with less generalizability due to individual variability. For robot motion design, a hybrid approach that combines natural cues with selectively amplified elements may optimize both naturalness and clarity.
Embodiment Effects
Physical embodiment of the robot amplifies the interpretability and salience of motion cues, particularly in social impression metrics. Video-based evaluation underestimates these effects, indicating that physical interaction is essential for accurate assessment of expressive robot motion.
Cue-Interpretation Mismatch
A notable finding is the mismatch between the intention encoded in human motion and the impression formed by observers when the same timing cues are executed by a robot. For example, a longer pre-lift stop intended to signal "wanting the opponent to capture the piece" was interpreted as higher intelligence by observers. This highlights the challenge of designing robot motions that reliably communicate intended meanings.
Design Implications
- Prioritize Late-Phase Timing: Withdrawal and other late-phase timing variations are critical for impression formation.
- Selective Cue Amplification: Intentional cues should be selectively amplified for clarity, while unconscious cues provide naturalness.
- Physical Evaluation: Embodiment effects necessitate physical evaluation of expressive robot motions.
Conclusion
The study demonstrates that timing-based human motion cues, especially those intentionally emphasized, are effective for designing expressive robot-arm movements. Physical embodiment significantly enhances the interpretability of these cues. Future research should address participant diversity, refine intentional expression protocols, and explore combined phase manipulations to further elucidate the mapping between motion cues and perceived intention. The findings have direct implications for collaborative HRI, where legible and expressive robot motions are essential for trust and efficiency.