Multi-Mapcher: Loop Closure Detection-Free Heterogeneous LiDAR Multi-Session SLAM Leveraging Outlier-Robust Registration for Autonomous Vehicles
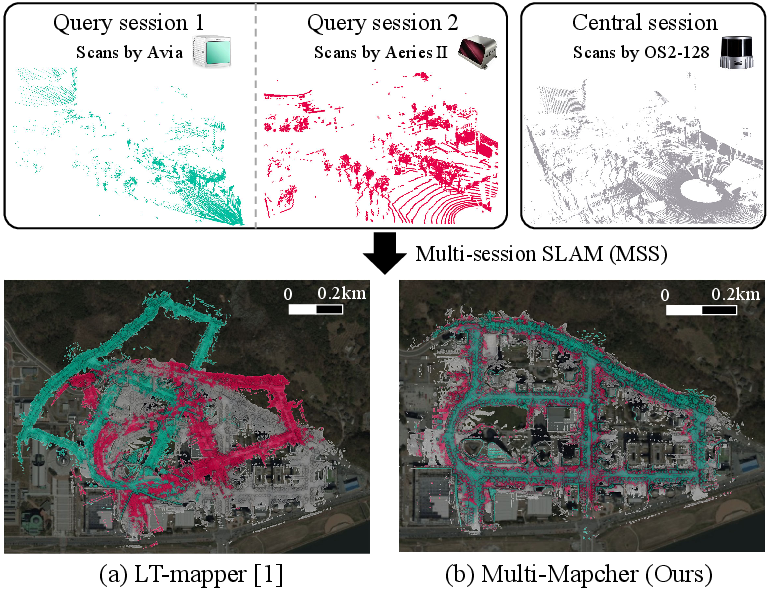
Abstract: As various 3D light detection and ranging (LiDAR) sensors have been introduced to the market, research on multi-session simultaneous localization and mapping (MSS) using heterogeneous LiDAR sensors has been actively conducted. Existing MSS methods mostly rely on loop closure detection for inter-session alignment; however, the performance of loop closure detection can be potentially degraded owing to the differences in the density and field of view (FoV) of the sensors used in different sessions. In this study, we challenge the existing paradigm that relies heavily on loop detection modules and propose a novel MSS framework, called Multi-Mapcher, that employs large-scale map-to-map registration to perform inter-session initial alignment, which is commonly assumed to be infeasible, by leveraging outlier-robust 3D point cloud registration. Next, after finding inter-session loops by radius search based on the assumption that the inter-session initial alignment is sufficiently precise, anchor node-based robust pose graph optimization is employed to build a consistent global map. As demonstrated in our experiments, our approach shows substantially better MSS performance for various LiDAR sensors used to capture the sessions and is faster than state-of-the-art approaches. Our code is available at https://github.com/url-kaist/multi-mapcher.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper is about helping robots and self-driving cars build one big, accurate map of a place even when the map data comes from different days and different kinds of 3D sensors. The authors introduce a new system called “Multi-Mapcher” that can join many separate maps into one, without relying on a tool called loop-closure detection (which often fails when sensors are different). Instead, it uses a way of matching whole maps directly, even when there are lots of bad matches, and then carefully polishes the result to make everything line up.
What problem are they trying to solve?
Imagine several trips through the same city using different vehicles and different 3D scanners (LiDARs). Each trip creates its own map, like separate puzzle pieces. The goal is to combine these pieces into one big, consistent puzzle picture. But that’s hard because:
- Different LiDARs “see” the world differently (they have different densities and fields of view).
- A common method called loop closure detection (finding the same place across trips) can break when sensors are different.
- Small errors inside each single trip’s map can make the final combined map look warped or misaligned.
The authors ask: How can we reliably stitch together many maps from different LiDARs without depending on loop-closure detection, and still get an accurate, consistent, and fast result?
How does their method work?
Think of building one big map in four simple steps:
- Build each trip’s map on its own
- They use existing SLAM tools to make a map and a path (trajectory) for each session (trip).
- This produces lots of 3D points and positions over time for that session.
- Align the maps to each other first (map-to-map matching)
- Instead of searching for matching places one scan at a time, Multi-Mapcher aligns whole maps from different sessions in one shot.
- It uses an “outlier-robust registration” method: this is like trying to overlay two big, fuzzy photos while ignoring the parts that don’t match (bad matches), so you don’t get fooled by them.
- Find local matches after the big alignment (scan-to-scan/submap-to-submap)
- Once the maps are roughly aligned, it becomes easy to find overlapping places between sessions (they’re now close to each other).
- The method refines these overlaps using small chunks of the map (called submaps), again with robust matching and a smart error rule that ignores parts sensors couldn’t see (so it doesn’t unfairly penalize differences in field of view).
- Clean up everything with global optimization
- Finally, Multi-Mapcher runs a solver that adjusts all the positions in all sessions so everything fits together smoothly.
- It uses “anchor nodes,” which you can imagine as pushpins that hold each session’s map to a common world. This solves the problem that each trip originally had its own coordinate system.
Key ideas explained simply
- LiDAR: A sensor that measures distance with lasers to build 3D maps of the surroundings.
- Multi-session SLAM: Combining maps from multiple trips into one shared map.
- Heterogeneous sensors: Different LiDAR types (some see all around, some only a slice; some are dense, some sparse).
- Outlier-robust registration: When matching two maps, many point pairs won’t be correct matches (outliers). A robust method down-weights or ignores those wrong matches so the alignment isn’t fooled.
- Map-to-map registration: Aligning entire maps directly, like overlaying two large photos of the same city taken by different cameras.
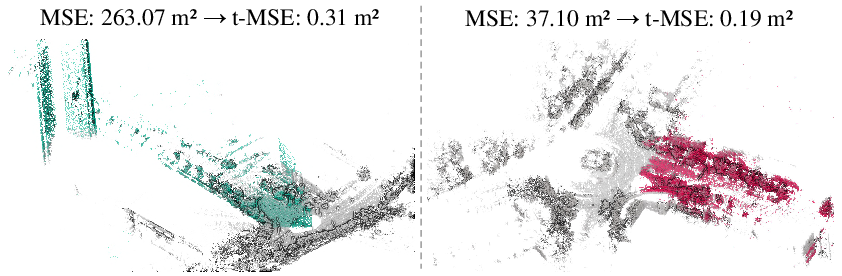
- Truncated error (t-MSE): When sensors see different parts of the scene, many point matches are impossible. The method computes error only on reasonable, close matches and ignores the rest, preventing false rejections.
- Pose graph optimization with anchor nodes: Imagine each session’s path as beads on a string. Anchor nodes pin each string to the table (a global coordinate system), and optimization moves the beads so all strings agree where places really are.
What did they find?
- It works across different LiDAR types: Multi-Mapcher consistently aligns sessions from very different sensors (like omnidirectional, solid-state, and others), where other methods often fail.
- It’s more reliable than loop-closure-heavy systems: Because it avoids depending on loop closure detection—which struggles when sensors differ—it can find the right alignment more often.
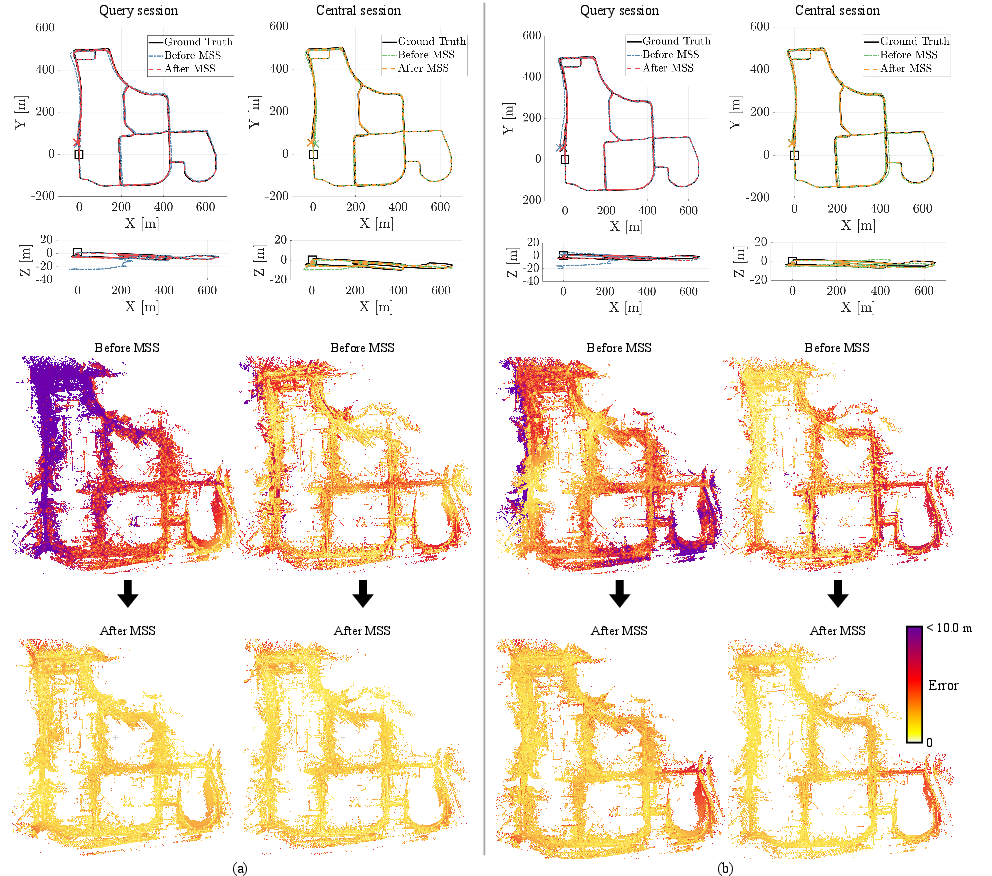
- It builds accurate, consistent maps: After the final optimization, the global map is cleaner and better aligned, even if some single-session maps had errors.
- It’s faster and more efficient than leading alternatives: The method reduces the heavy matching workload and still produces better results.
In short, Multi-Mapcher can make one high-quality map from multiple trips and different LiDARs, and it often does so faster and with fewer failures than current methods.
Why is this important?
- Real-world fleets mix sensors: Companies update vehicles over time, or different teams use different LiDARs. A method that unifies all their maps is very practical.
- Long-term autonomy: Cities and routes change. Multi-Mapcher can keep maps fresh by merging new sessions with old ones, even if the sensors changed.
- Collaborative robotics: Multiple robots with different sensor setups can share and merge maps, helping them work together more effectively.
Final takeaway
Multi-Mapcher shows that you don’t have to rely on loop closure detection to merge maps from different LiDARs. By aligning whole maps first with an outlier-robust method, then refining locally and optimizing globally with anchor nodes, it creates accurate, stable, and efficient multi-session maps. This could make long-term, large-scale mapping for self-driving cars and robot teams more reliable in the real world.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
The following points summarize what remains missing, uncertain, or unexplored in the paper, framed to be actionable for future research:
- Scalability of map-to-map registration: The paper does not quantify runtime, memory usage, and computational complexity as map size (number of points and sessions) grows; no analysis of scalability strategies (e.g., hierarchical/multi-resolution matching, GPU acceleration, or map partitioning).
- Minimum overlap requirements: The method’s success hinges on sufficient inter-session overlap but lacks quantified thresholds (at map and submap levels) for successful initial alignment and loop detection.
- Failure detection and fallback for initial alignment: There is no mechanism to detect or recover from incorrect map-to-map registration; no validation schemes (e.g., global consistency checks, cross-validation submaps, or PCM-like consistency maximization) are provided if the initial transform is wrong.
- Parameter sensitivity and auto-tuning: Critical parameters (voxel sizes m and s, submap window T, ICP correspondence distance, t-MSE threshold τ_MSE, GNC kernel truncation c̄, COTE noise bounds σ) are fixed without sensitivity analysis or automatic adaptation to different sensors, environments, or scales.
- Robustness limits of outlier-robust registration: The method tolerates ~70–80% outliers but does not characterize performance beyond this regime, nor in highly symmetric or repetitive environments where geometric ambiguity is common.
- Dependence on FPFH under heterogeneous sensing: The impact of heterogeneous LiDAR point densities and FoV differences on normal estimation and FPFH quality (r_normal, r_FPFH) is not analyzed; alternatives (multi-scale features, learned descriptors, or hybrid representations) are unexplored.
- t-MSE metric design and generalization: The truncated MSE lacks theoretical characterization (density/voxel-size invariance, relation to overlap) and guidance for threshold selection τ_MSE across sensors and environments; adaptive, data-driven thresholds are not considered.
- Handling severely deformed single-session maps: The approach assumes per-session rigid alignment; it does not address large non-rigid drift or structural deformation in session maps (e.g., through non-rigid registration or hierarchical submap correction).
- Sessions with minimal or no overlap: There is no strategy to detect non-overlapping sessions or to gracefully abort merging without harming the global map; the paper does not quantify the false positive rate under low-overlap conditions.
- Extension to many sessions (beyond C–Q pairs): The pipeline and notation focus on aligning one query to one central session; policies for merging N>2 sessions (ordering, central-session selection, multi-anchor formulation, and incremental alignment strategies) are not specified or evaluated.
- Anchor node covariance design: The method biases Δ_Q relative to Δ_C but offers no principled guidelines for covariance selection, its effect on convergence/stability, or how to scale this to many sessions with different uncertainties.
- Robustness to high dynamics: Although robustness to dynamic changes is claimed, there is no explicit dynamic point filtering or motion segmentation; performance under heavily dynamic urban scenes (crowds, traffic) remains unquantified.
- Sensor coverage and generalization: Flash LiDAR is excluded; the method’s applicability to other heterogeneous modalities (e.g., low-resolution, multi-return LiDARs, solid-state with very narrow FoV) is untested.
- Use of additional cues (intensity, semantics): The pipeline relies on geometry-only features; the potential benefits of intensity/remission, semantics, or multi-modal cues (e.g., cameras) for robust cross-sensor correspondences are not explored.
- ICP truncation strategy: The fixed maximum correspondence distance to mitigate FoV differences lacks principled derivation; adaptive schemes (e.g., based on estimated overlap, local density, or uncertainty) are not investigated.
- Place recognition complementarity: LCD is deliberately avoided; it remains open whether robust LCD (e.g., sensor-agnostic, learned descriptors) could be safely integrated post-initial alignment to improve recall and redundancy.
- Calibration and synchronization robustness: The impact of LiDAR–IMU extrinsic calibration errors and time synchronization issues on map accumulation and registration is not assessed; detection/correction mechanisms are absent.
- Vertical ambiguity and multi-level environments: The method’s ability to disambiguate vertical structures (bridges, stacked roads, multi-floor areas) is not empirically characterized, especially under heterogeneous sensor FoVs.
- Absolute global accuracy and priors: The role of the prior factor p_C in setting global frame accuracy is unclear; effects of poor priors (e.g., wrong GNSS/INS) on global map consistency are not studied.
- Breadth of evaluation: Comprehensive cross-sensor pairings (O–L, L–O, O–A, A–O, L–A, A–L), varied environments (vegetated, indoor, tunnels), and different front-ends are only partially reported; failure cases and success rates across these axes are missing.
- Robustness of PGO to false loops: The pose graph uses a robust kernel ρ(·), but no outlier consistency mechanism (e.g., PCM) is employed; the tolerance to residual false inter-session loops that pass t-MSE filtering is not quantified.
- Map maintenance over time: Policies for long-term map management (incremental merging, map compression/decimation, redundancy removal, and aging of sessions) are not covered.
- Resource constraints and online operation: The approach is centralized and offline; adaptation to decentralized settings (limited bandwidth, real-time constraints), and online continuous merging are unaddressed.
- Hierarchical/global search strategies: Map-to-map matching uses single-level FPFH-based correspondences; hierarchical coarse-to-fine global search or graph-based region proposals for large maps are not investigated.
- Reproducibility and deployment details: The paper does not detail implementation-level choices influencing results (e.g., memory limits, parallelization, GPU use), nor provide guidelines to reproduce performance on very large datasets.
Practical Applications
Immediate Applications
The items below can be deployed now using the methods, code, and workflow described in the paper (Multi-Mapcher), assuming standard SLAM toolchains and common LiDAR platforms.
- Heterogeneous LiDAR HD-map merging and updates
- Sectors: Automotive, Mapping/Geospatial, Smart Cities
- Use case: Fuse multi-session street-scale maps collected by different vehicles with different LiDARs (e.g., Ouster OS2-128, Livox Avia, Aeva Aeries 2) to maintain an up-to-date, consistent HD map without relying on loop-closure detection (LCD) descriptors.
- Tools/workflow: Single-session SLAM (KISS-ICP/FAST-LIO2/PV-LIO) → map-to-map registration via FPFH + Quatro++ → inter-session loop via radius search + t-MSE filtering → anchor-node pose graph optimization in GTSAM (iSAM2) → global map export.
- Dependencies/assumptions: Sufficient spatial overlap across sessions; reasonable single-session odometry quality; sensor extrinsics within sessions are calibrated; compute/memory for voxelized map-to-map registration; flash LiDAR not yet supported (low resolution); scenes not dominated by extreme dynamics.
- Fleet map maintenance across hardware refresh cycles
- Sectors: Automotive, Robotics
- Use case: Merge legacy maps produced by older LiDAR hardware with new data from upgraded sensors to avoid remapping entire service areas after sensor retrofits.
- Tools/workflow: Multi-Mapcher CLI/ROS node integrated into existing map ops pipelines; batch-processing new sessions nightly; anchor-node alignment to a stable “central” session map.
- Dependencies/assumptions: Overlap between legacy and new coverage; consistent coordinate frames for “central” session; policy/QA gates to validate t-MSE and inter-session alignment error before release.
- Cross-vendor warehouse/factory map unification
- Sectors: Logistics/Industrial Automation
- Use case: Build and maintain a single facility map from autonomous mobile robots (AMRs) with different LiDARs (and different FoVs/densities), enabling shared localization and simplified fleet orchestration.
- Tools/workflow: Submap-to-submap inter-session loop (t-MSE) to accommodate FoV differences; periodic batch PGO to refresh the global map; export to localization layers used by AMRs.
- Dependencies/assumptions: Consistent floor plan structure; enough static structure (shelving, walls) to provide inliers; limited occlusion from moving inventory.
- Multi-team disaster response map stitching
- Sectors: Public Safety/Defense
- Use case: Rapidly merge maps captured by heterogeneous ground robots and UGVs in GPS-denied environments for situational awareness.
- Tools/workflow: On-site compute or portable server; LCD-free initial map-to-map alignment; outlier-robust registration to handle partial overlap and dynamic changes; frequent PGO updates as new sessions arrive.
- Dependencies/assumptions: Partial overlap between search sectors; basic standardization of point cloud formats (PCD/LAZ); sufficient compute on a field server; dynamic changes not overwhelming.
- AEC construction site progress integration
- Sectors: Architecture/Engineering/Construction (AEC)
- Use case: Merge multi-session scans from different mobile scanners over weeks/months to monitor progress and deviations.
- Tools/workflow: Batch ingestion of sessions → coarse map-to-map → submap refinement (ICP with distance truncation) → global PGO → delta/change reporting.
- Dependencies/assumptions: Persistent structural references across sessions; careful handling of localized dynamic zones; voxel size and ICP truncation tuned to site dimensions.
- Cross-platform geospatial dataset fusion (TLS, MLS, UAV LiDAR)
- Sectors: Surveying/Geospatial
- Use case: Integrate terrestrial, mobile, and aerial LiDAR datasets gathered at different times into a coherent base map for asset inventories or corridor mapping.
- Tools/workflow: Per-platform single-session SLAM; FPFH-based correspondence with consistency filtering; Quatro++ for initial alignment; submap refinement; export to GIS/Digital Twin.
- Dependencies/assumptions: Height/attitude variation handled by anchor-node PGO; adequate overlap between vantage points; format/CRS normalization.
- Indoor facility digital twin updates (hospitals, campuses)
- Sectors: Facilities Management, Healthcare, Education
- Use case: Maintain a single, consistent indoor map from robots with different LiDARs for navigation, cleaning, delivery, or AR wayfinding.
- Tools/workflow: Building-per-floor central session; frequent submap-to-submap alignment for newly collected routes; t-MSE to filter false loops due to narrow FoVs.
- Dependencies/assumptions: Sufficient static infrastructure (walls, pillars); limited glass/transparency artifacts; carefully managed multi-floor anchoring.
- Academic toolkit for heterogeneous MSS and robust registration
- Sectors: Academia/Research
- Use case: Replace LCD-heavy baselines in experiments with a robust, descriptor-agnostic pipeline for heterogeneous sensors; curate new MSS benchmarks.
- Tools/workflow: Multi-Mapcher open-source code; GTSAM/iSAM2; Quatro++ and ICP; reproducible scripts/dataset splits (HeLiPR, HILTI, MulRan, KITTI).
- Dependencies/assumptions: Access to datasets with known cross-session overlap; compute sufficient for map-to-map alignment.
- Map alignment QA and triage
- Sectors: Software/Tooling
- Use case: Introduce t-MSE and inter-session alignment error (iSAE) checks as automated gates in CI/CD for map release pipelines.
- Tools/workflow: Compute t-MSE on candidate loops; threshold-based rejection; dashboards surfacing hotspots; re-run PGO after triage.
- Dependencies/assumptions: Representative loop candidates; stable thresholds per environment class; telemetry for audit.
- Change-aware relocalization layer updates
- Sectors: Automotive, Robotics
- Use case: Refresh local submaps used for localization by swapping in PGO-optimized segments after merging new sessions; improve localization robustness without full remapping.
- Tools/workflow: Export updated submaps and anchor transforms; diff-based replacements; A/B testing in localization stacks (Autoware/Apollo).
- Dependencies/assumptions: Backward-compatibility with localization pipelines; careful versioning of submaps and transformations.
Long-Term Applications
The items below will benefit from further research, scaling, or integration work (e.g., real-time constraints, standards, cross-modality expansion).
- Real-time decentralized heterogeneous multi-robot SLAM
- Sectors: Robotics, Defense, Mining
- Use case: Online, bandwidth-aware collaborative mapping among heterogeneous robots using anchor-node PGO and robust inter-session loop proposals without LCD descriptors.
- Tools/workflow: Edge implementations of GNC-based registration; peer-to-peer loop candidate exchange; robust outlier rejection (t-MSE-like) in-stream.
- Dependencies/assumptions: Efficient streaming correspondences; communication constraints; incremental map-to-map registration at lower latency.
- City-scale HD map cloud service with continuous, sensor-agnostic updates
- Sectors: Automotive, Smart Cities
- Use case: Cloud-native service that ingests thousands of sessions/day from diverse fleets, continuously merges them, and publishes consistent city maps for localization and planning.
- Tools/workflow: Scalable correspondence search (e.g., feature indices), distributed Quatro++; sharded PGO with anchor-node hierarchies; map versioning and rollout.
- Dependencies/assumptions: Cloud/HPC resources; data governance; automated QA metrics (t-MSE/iSAE) at scale; strong observability.
- Cross-modality map alignment (LiDAR–camera–radar)
- Sectors: Automotive, XR, Robotics
- Use case: Extend outlier-robust map-to-map concepts to align heterogeneous sensing modalities, enabling sensor-agnostic global maps and resilience to sensor outages.
- Tools/workflow: Unified features or learned descriptors across modalities; cross-modality correspondences; generalized robust PGO.
- Dependencies/assumptions: New descriptor research; calibration and synchronization; training data for cross-modality robustness.
- Semantic scene graphs + robust geometric alignment
- Sectors: Smart Infrastructure, Robotics
- Use case: Combine Hydra-like semantic graphs with Multi-Mapcher’s robust geometry to align sessions across large-scale environments with dynamic semantics.
- Tools/workflow: Semantic node registration as “map-to-map” initialization; anchor-node PGO with semantic priors; change-aware merging.
- Dependencies/assumptions: Reliable semantic extraction; handling class drift over time; robust treatment of dynamic objects.
- National/regional digital twin maintenance
- Sectors: Public Sector, Utilities
- Use case: Long-term maintenance of large digital twins using periodic, heterogeneous scans from contractors and public fleets; policy-grade consistency guarantees.
- Tools/workflow: Federated map ingestion; standardized QA (t-MSE/iSAE thresholds per asset class); audit trails; rollbacks and confidence scoring.
- Dependencies/assumptions: Interoperability standards; procurement guidelines for sensor-agnostic deliverables; governance frameworks.
- Autonomy safety validation across sensor swaps
- Sectors: Automotive, Policy/Regulation
- Use case: Regulatory workflows verifying that HD maps remain consistent when fleets change LiDAR suppliers; quantify map changes using alignment metrics.
- Tools/workflow: Automated merge-and-compare pipelines; conformance tests on anchor-node PGO results; reporting to authorities.
- Dependencies/assumptions: Accepted metrics and thresholds; traceability; privacy-compliant pipelines.
- Consumer-grade multi-device indoor mapping (XR/AR + robots)
- Sectors: Consumer Tech, Education
- Use case: Seamless fusion of phone/tablet LiDAR, AR headsets, and home robots into a consistent home/office map for navigation and spatial experiences.
- Tools/workflow: Lightweight robust registration on-device; cloud offload for full PGO; multi-session map maintenance with t-MSE-like heuristics.
- Dependencies/assumptions: Improved low-res/flash LiDAR support; UX for conflict resolution; battery/compute constraints.
- Automated change detection and drift correction services
- Sectors: AEC, Energy, Transportation
- Use case: Periodically re-align and compare sessions to detect structural changes or accumulated drift; trigger targeted re-mapping.
- Tools/workflow: Scheduled map-to-map alignment; delta generation; confidence scoring per region; operator review workflows.
- Dependencies/assumptions: Robustness to seasonal/operational dynamics; thresholds tuned to application risk.
- Cross-sensor standards and test suites for heterogeneous MSS
- Sectors: Standards Bodies, Academia, Industry Consortia
- Use case: Establish benchmarks and data formats that encourage sensor-agnostic SLAM and map merging; include t-MSE/iSAE-style KPIs.
- Tools/workflow: Open datasets spanning LiDAR types; reference pipelines; leaderboards; certification tests.
- Dependencies/assumptions: Community adoption; contributors across vendors; dataset licensing.
- On-vehicle near-real-time incremental map-to-map alignment
- Sectors: Automotive, Robotics
- Use case: Perform coarse map-to-map alignment onboard for rapid relocalization against a fleet map even when LCD fails, then refine in the cloud.
- Tools/workflow: Incremental FPFH feature maintenance; budgeted GNC; partial PGO updates; later cloud reconciliation.
- Dependencies/assumptions: Embedded compute budgets; robust fallback strategies; efficient memory management.
Notes on key innovations enabling these applications
- Outlier-robust 3D registration (Quatro++ with GNC and COTE) makes large-scale map-to-map initialization feasible, reducing dependency on LCD descriptors that degrade across heterogeneous LiDARs.
- Anchor node-based multi-session PGO aligns multiple trajectories in a common global frame, resolving under-constrained multi-session optimization.
- Truncated MSE (t-MSE) filtering mitigates false positives in inter-session loop detection arising from FoV and density differences.
- The pipeline is front-end agnostic (works with various single-session SLAM backends) and robust to partial overlap and moderate dynamics.
These innovations collectively support immediate deployment in offline or batched workflows and motivate future work toward real-time, cross-modality, and city-scale map maintenance.
Glossary
- Anchor node: A variable in multi-session SLAM that encodes the transform from the global coordinate system to a session’s local reference frame to remove under-constrained trajectories. "To address the first issue, we introduce the concept of an anchor node, which is a state that expresses the transformation matrix from the global coordinate system to the reference frame of each session~\cite{kim2010multiple, mcdonald2013real, ozog2016long}."
- Component-wise translation estimation (COTE): A robust translation solver that estimates each component (x, y, z) independently using consensus within bounded noise. "Finally, component-wise translation estimation~(COTE)~\cite{yang2020teaser} is performed to estimate the relative translation."
- Consensus maximization: An optimization approach that selects parameters maximizing the number of inliers within predefined noise bounds. "Thus, \eqref{eqn:decouple_trans} operates similarly to consensus maximization~\cite{li2009consensus}, which involves performing a weighted summation based on the subset with the most overlap within the noise bounds."
- DOOR-SLAM: A decentralized multi-robot SLAM framework leveraging peer-to-peer communication and robust loop validation. "Lajoie~\etalcite{lajoie2020door} proposed DOOR-SLAM, which is based on peer-to-peer communication and first proposed an outlier-robust pairwise consistency maximization~(PCM) algorithm to reject spurious inter-session loops."
- Fast Point Feature Histogram (FPFH): A local 3D descriptor capturing point neighborhood geometry for establishing correspondences. "we use the fast point feature histogram~(FPFH)~\cite{rusu2009fpfh} because it can be easily used regardless of the scale of the point cloud."
- Factor graph: A graphical model with variable nodes (poses) and factor nodes (constraints) used to structure SLAM optimization problems. "To perform PGO, a factor graph should be constructed by expressing the poses of the robot as nodes and the estimated relative pose differences as constraints."
- Graduated non-convexity (GNC): A robust optimization scheme that gradually introduces nonconvexity to downweight outliers and improve convergence. "Chang~\etalcite{chang2022lamp} demonstrated that LAMP\;2.0 can build a consistent map in tunnel-like degenerate scenes by employing an outlier-resilient PGO based on graduated non-convexity~(GNC)~\cite{yang2020teaser}."
- Horn's method: A classic closed-form algorithm to estimate rotation and translation from point correspondences, often decoupling rotation first. "following Horn's method~\cite{horn1987closed}, which estimates $\hat{\mathbf{R}$ and $\hat{\mathbf{t}$ independently, the relative rotation is calculated first in a translation-invariant space."
- iSAM2: An incremental smoothing and mapping optimizer for efficiently solving large SLAM factor graphs. "In our experiments, our Multi-Mapcher was implemented based on iSAM2~\cite{kaess2012isam} of GTSAM~\cite{dellaert2018gtsam}."
- Iterative Closest Point (ICP): A local point cloud registration algorithm that refines alignment by minimizing distances between closest point pairs. "Second, we estimate the relative pose between the two nodes in a coarse-to-fine manner using Quatro and local registration, such as the iterative closest point~(ICP)~\cite{lim2023quatro++}."
- Iverson bracket: A notation [·] that evaluates to 1 if the condition is true and 0 otherwise, often used in counting inliers. "and is Iverson bracket, which outputs one if the condition is satisfied and zero otherwise."
- LiDAR SLAM: SLAM techniques that use LiDAR sensors to estimate trajectories and build maps from point clouds. "Over the past few years, numerous studies have significantly advanced LiDAR SLAM, focusing primarily on the development of various methods for accurate mapping in single session SLAM~\cite{wang2020intelligent,gkillas2023federated,tian2023dl,xia2023integrated,zhao2019lidar,kim2024awvmoslio,he2024igicp,zhou2023hpplo,lim2023ur,jo2024real,zhang2022intelligent,liu2023software}."
- Loop closure detection (LCD): The process of detecting revisits to previously seen places to create loop constraints that correct drift. "These approaches rely heavily on loop closure detection~(LCD) modules to establish associations between the same locations in different sessions, which are referred to as inter-session loops."
- Mahalanobis distance: A covariance-weighted distance metric used to measure residuals under uncertainty. "where the form of is the squared Mahalanobis distance with the error vector and covariance matrix ;"
- Map-to-map registration: Direct alignment between accumulated maps to estimate inter-session transforms without relying on loop detection. "propose a novel MSS framework, called Multi-Mapcher, that employs large-scale map-to-map registration to perform inter-session initial alignment, which is commonly assumed to be infeasible, by leveraging outlier-robust 3D point cloud registration."
- Maximum clique inlier selection: A graph-theoretic method that finds the largest mutually consistent subset of correspondences to prune outliers. "First, maximum clique inlier selection~\cite{rossi2013pmc,pattabiraman2015pmc}, which is a graph-theoretic pruning approach~\cite{shi2021robin}, is applied to reject outlier correspondences in advance."
- Multi-session SLAM (MSS): Aligning and merging multiple sessions’ maps into one global coordinate system for long-term operation. "Multi-session simultaneous localization and mapping~(Multi-session SLAM, or MSS) is an approach for aligning multiple maps collected by autonomous vehicles or robots over time to build a single comprehensive map in a global coordinate system~\cite{kim2022lt, lajoie2023swarm, kim2010multiple, mcdonald2013real, ozog2016long}."
- Outlier-robust registration: Registration techniques that estimate poses while suppressing or rejecting mismatched correspondences. "by leveraging outlier-robust 3D point cloud registration."
- Pairwise consistency maximization (PCM): A method that evaluates consistency among loop candidates to eliminate spurious matches. "Lajoie~\etalcite{lajoie2020door} proposed DOOR-SLAM, which is based on peer-to-peer communication and first proposed an outlier-robust pairwise consistency maximization~(PCM) algorithm to reject spurious inter-session loops."
- Pose Graph Optimization (PGO): Optimization over a graph of poses and constraints (odometry, loops) to produce a consistent trajectory/map. "Finally, anchor node-based pose graph optimization~(PGO) for multiple sessions~\cite{kim2010multiple, mcdonald2013real, ozog2016long} is performed to refine the alignment and build a consistent global map, as shown in~\figref{fig:motivation}(b)."
- Quatro: An outlier-robust registration algorithm specialized for urban LiDAR data and a variant of TEASER++. "we proposed an outlier-robust registration method specialized for urban environments, Quatro~\cite{lim2022single, lim2023quatro++}, which is a variant of TEASER++~\cite{yang2020teaser}."
- Scan-to-scan registration: Alignment performed between individual LiDAR scans to estimate relative poses or loop constraints. "this outlier-robust registration is employed not only at the map-to-map level but also at the scan-to-scan level to enhance inter-session loop closing."
- SE(3): The Lie group of 3D rigid body transformations (rotation and translation) used to represent robot poses. " and are SE(3) pose transformation operators that add and subtract poses corresponding to the nodes, respectively;"
- SO(3): The Lie group of 3D rotations used to represent rotation matrices. "Then the objective function to estimate the relative rotation matrix~ and translation vector~ is formulated as follows:"
- Stable Triangle Descriptor (STD): A 3D geometric descriptor used for loop closure detection in LiDAR-based MSS. "Yuan~\etalcite{yuan2023lta} proposed LTA-OM, which exploits the stable triangle descriptor~(STD)~\cite{yuan2023std} to perform LCD and suggested a novel factor marginalization."
- TEASER++: A certifiably robust registration framework employing GNC and decoupled rotation/translation estimation. "Quatro~\cite{lim2022single, lim2023quatro++}, which is a variant of TEASER++~\cite{yang2020teaser}."
- Translation-invariant measurements (TIMs): Differences between matched points that cancel translation to allow rotation estimation independent of translation. "we define translation-invariant measurements~(TIMs) of and as and ,"
- Truncated Mean Squared Error (t-MSE): A metric that ignores correspondences beyond a distance threshold to handle FoV mismatches when judging alignment quality. "Third, we introduce the truncated MSE~() to additionally account for these differences in FoV, which is defined as follows:"
- Voxel sampling: Downsampling points into uniform 3D grid cells to reduce data size and enable efficient feature computation and matching. "where before the correspondence estimation;"
Collections
Sign up for free to add this paper to one or more collections.

