- The paper demonstrates a 10% base drag reduction by optimizing pulsed-jet actuator parameters using a hybrid genetic algorithm.
- It details an experimental setup with wind tunnel testing, PIV measurements, and robust uncertainty screening to validate the control law.
- The study highlights the trade-off between drag reduction and actuation cost, offering a balanced, energy-efficient solution.
Hybrid Genetic Algorithm Optimization of Pulsed-Jet Drag Reduction for Road Vehicles
Introduction and Motivation
Aerodynamic drag on flat-backed vehicles, such as vans and trucks, is dominated by the low-pressure wake generated by flow separation at the rear edges. This base drag is a primary contributor to fuel consumption at highway speeds, making its reduction a critical target for both economic and environmental reasons. Traditional passive and active flow control strategies have demonstrated varying degrees of success, but the complexity and high dimensionality of turbulent wake dynamics limit the efficacy of model-based approaches. Recent advances in model-free, machine learning-based control have shown promise in discovering non-intuitive actuation strategies, yet challenges remain in balancing drag reduction with actuation energy cost and ensuring robust experimental evaluation.
This study presents an experiment-in-the-loop optimization of pulsed-jet actuation on a simplified van model using a hybrid genetic algorithm (HyGO). The approach combines the global search capabilities of genetic algorithms with the local refinement of the Downhill Simplex method, targeting both drag minimization and actuation energy efficiency. The optimization is performed directly in a wind tunnel, with a cost function that penalizes excessive mass flow to ensure practical relevance.
Experimental Setup
The experiments were conducted in a low-turbulence Eiffel-type wind tunnel using a scaled van model with four pairs of pulsed jet actuators located at the rear edges. The actuation system is capable of independent frequency, duty cycle, and phase control for the top, bottom, and lateral jets, with the latter two sharing frequency and duty cycle but allowing for a phase offset. The aerodynamic drag is measured via a high-precision load cell, and the base pressure distribution is captured using a dense array of static pressure taps. Particle Image Velocimetry (PIV) is employed to resolve the velocity field in multiple vertical planes downstream of the base.
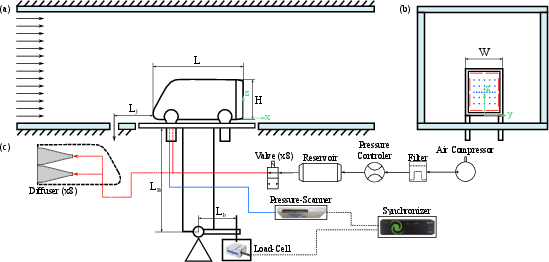
Figure 1: Schematic of the wind tunnel experimental setup, showing the bluff body, actuator locations, and measurement systems.
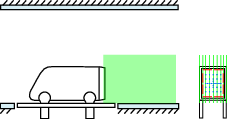
Figure 2: Arrangement of PIV measurement planes, covering the wake region with high spatial resolution.
The control law is parameterized by seven variables: three frequencies (f1, f2, f3), three duty cycles (DC1, DC2, DC3), and a phase offset (ϕ) between the lateral jets. The cost function is defined as:
J(θ)=Ja+γJb=D0D+γm˙SJm˙
where D is the measured drag, D0 is the baseline drag (no actuation), m˙ is the mass flow rate of the jets, and m˙SJ is the mass flow for steady, continuous actuation. The penalty weight γ is empirically chosen to balance drag reduction and actuation cost, ensuring that the optimizer does not converge to energetically impractical solutions.
The HyGO algorithm initializes the search with Latin Hypercube Sampling, then iteratively applies genetic operators (crossover, mutation, tournament selection) and local simplex-based refinement. Each candidate solution is evaluated experimentally, with a robust protocol for repeated measurements and uncertainty screening to mitigate the effects of sensor drift and noise.
Optimization Results and Pareto Analysis
The optimizer evaluated 688 individuals over 10 generations. Rapid convergence was observed, with the best solutions stabilizing in the final generations. The optimal control law achieved a drag reduction of approximately 10% relative to the baseline, with a net energy benefit after accounting for actuation cost. The Pareto front analysis revealed a clear trade-off: maximal drag reduction (up to 12.5%) is possible at the expense of high mass flow, but the global optimum balances both objectives.
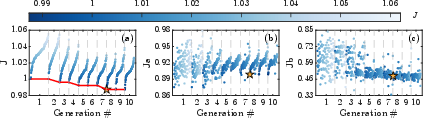
Figure 3: Evolution of the cost function J, drag cost Ja, and penalization Jb across generations, highlighting convergence and trade-offs.
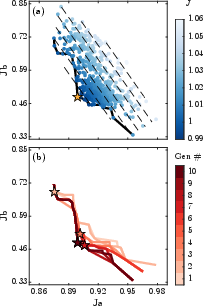
Figure 4: Pareto front analysis showing the distribution of evaluated individuals in the (Ja,Jb) objective space and the progression of the non-dominated front.
The optimal actuation strategy features a low-frequency, high-duty-cycle bottom jet (targeting the natural vortex shedding mode) and high-frequency, lower-duty-cycle top and lateral jets (modulating shear-layer instabilities). The optimizer tends to minimize the contribution of the lateral jets, likely due to the structure of the cost function, which penalizes their duty cycle more heavily.
Base Pressure and Wake Topology Modification
Time-resolved base pressure measurements demonstrate that all actuation strategies induce significant pressure recovery in the lower base region, which is the primary driver of drag reduction. The optimal and maximal-drag-reduction cases yield similar mean pressure profiles, with a broader area of pressure recovery than steady blowing. However, pulsed actuation also increases pressure fluctuations, particularly in regions influenced by the phase-shifted lateral jets.
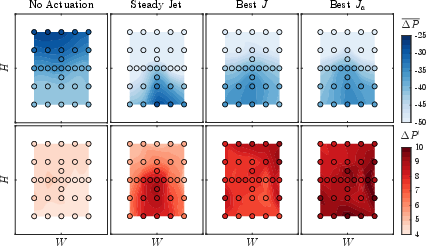
Figure 5: Time-averaged and fluctuating base pressure contours for baseline, steady-jet, optimal J, and optimal Ja cases.
A clustering analysis of the pressure field data, using Gaussian Mixture Models in a reduced-order embedding, identifies six distinct control regimes. High-performing clusters are characterized by increased lower-base pressure and reduced fluctuations, while low-performing clusters exhibit high pressure near the upper base and large oscillations.
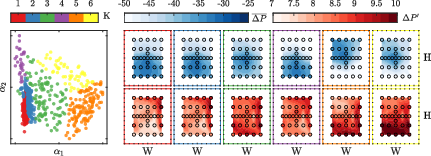
Figure 6: Clustering of control regimes in reduced-order space, with corresponding weighted-average base pressure maps for each cluster.
Flow Field and Turbulence Structure
PIV measurements reveal that all actuation strategies induce a strong downward velocity in the near-wake, compressing and shifting the recirculation bubble closer to the base. The bottom jet, operating near the natural shedding frequency, is most effective at suppressing the lower recirculation vortex and promoting pressure recovery. The top jet, actuated at higher frequency, appears to energize the upper shear layer, further stabilizing the wake.
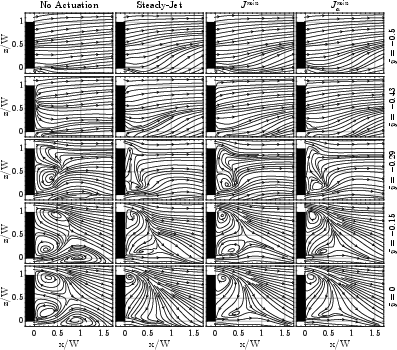
Figure 7: Time-averaged streamlines in multiple vertical planes for the four key control scenarios, illustrating wake compression and reorganization.
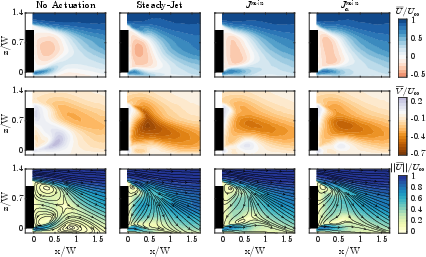
Figure 8: Mean velocity fields in the symmetry plane, showing the effect of actuation on recirculation bubble length and vertical velocity.
Second-order turbulence statistics indicate that the optimal control law generates strong streamwise velocity fluctuations at the bottom of the wake, consistent with excitation of the natural shedding mode. The maximal-drag-reduction case distributes turbulent energy more evenly, while the steady-jet case produces the largest vertical velocity fluctuations due to persistent downward momentum injection.
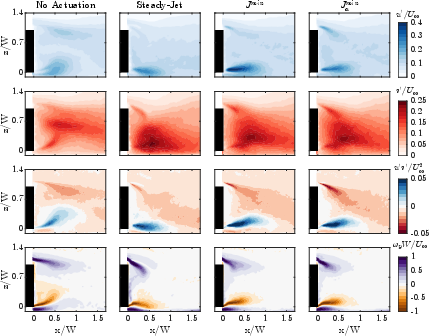
Figure 9: Second-order turbulence statistics in the symmetry plane, including velocity fluctuations, Reynolds shear stress, and mean spanwise vorticity.
Implementation Considerations and Practical Implications
The experiment-in-the-loop optimization protocol, including robust uncertainty management and repeated measurements, is essential for reliable evaluation in noisy, real-world environments. The hybrid genetic algorithm framework is well-suited for high-dimensional, nonconvex control landscapes typical of turbulent flow control problems. The explicit penalization of actuation cost in the objective function is critical for ensuring practical, energetically efficient solutions.
The identified control law is non-intuitive and multi-faceted, leveraging both low- and high-frequency actuation to manipulate distinct wake features. The results are consistent with, and in some cases outperform, previous studies using deep reinforcement learning and other machine learning control strategies, particularly when energy efficiency is considered.
Conclusion
This study demonstrates that a hybrid genetic algorithm, operating in a model-free, experiment-in-the-loop framework, can efficiently discover energetically optimal pulsed-jet actuation strategies for base drag reduction on a generic road-vehicle model. The approach yields a robust 10% drag reduction with net energy savings, achieved through a combination of low-frequency bottom jet actuation and high-frequency modulation of the upper wake. The findings highlight the importance of cost function design, robust experimental protocols, and the synergy between global and local search in high-dimensional control problems. Future work should explore alternative cost function formulations to further exploit lateral actuation and extend the methodology to more complex vehicle geometries and on-road conditions.