- The paper demonstrates that independent replanning with fast ASAO planners leads to higher success rates and shorter global paths compared to traditional plan-reuse algorithms.
- It employs fast planners like EIT* and AORRTC to solve each incremental planning problem from scratch, reducing computational overhead and complexity.
- Empirical results in both simulation and real-world experiments confirm near-optimal path quality and robust performance under dynamic obstacle changes.
Revisiting Replanning from Scratch: Real-Time Incremental Planning with Fast Almost-Surely Asymptotically Optimal Planners
Introduction
This paper challenges the prevailing paradigm in incremental motion planning for robotics, which has historically emphasized plan-reuse strategies to maintain path consistency and optimality in dynamic environments. The authors propose and empirically validate an alternative approach: solving each incremental planning problem independently using fast almost-surely asymptotically optimal (ASAO) planners, specifically Effort Informed Trees (EIT*) and Asymptotically Optimal RRT-Connect (AORRTC). The central claim is that, given sufficiently fast ASAO planners, independent replanning can outperform plan-reuse algorithms in both solution quality and computational efficiency, even when the cost of detecting changes in the environment is ignored.
Motion planning in dynamic or partially known environments is typically addressed via predictive or reactive strategies. Predictive methods leverage prior knowledge or models of obstacle motion, but their efficacy is limited by the accuracy of predictions. Reactive methods, including bug algorithms and incremental planners like D*, LPA*, and RRT\textsuperscript{X}, update plans in response to new information. Plan-reuse algorithms maintain and repair search trees to preserve path consistency and optimality, but incur significant computational overhead, especially when the locations of changes are not readily available.
Recent advances in ASAO planners, such as EIT* and AORRTC, offer rapid convergence to high-quality solutions, enabling real-time replanning without explicit plan reuse. The paper positions these planners as a practical alternative for incremental planning in dynamic environments.
The incremental planning problem is formalized as a sequence of optimal planning queries, each defined by the robot's current state and the set of obstacles sensed within a specified range and time horizon. At each iteration, the robot solves for an optimal path in the currently known free space, executes the path up to the boundary of its sensing region, updates its obstacle map, and repeats the process until the goal is reached. The global solution is the concatenation of these intermediate paths, and the objective is to minimize the total cost (e.g., path length) of the executed trajectory.
Independent Incremental Planning Approach
The proposed approach eschews plan reuse entirely. Instead, at each replanning event, the robot invokes an ASAO planner to solve the current planning problem from scratch, using only the latest sensed obstacle information. The key insight is that, if the planner is sufficiently fast and provides strong optimality guarantees, the resulting sequence of intermediate solutions will be consistent and near-optimal globally, without the need for explicit mechanisms to maintain path homotopy or repair previous plans.
The algorithmic structure is straightforward:
1
2
3
4
5
6
7
8
9
10
11
12
13
|
def independent_incremental_planning(X, x0, x_goal, r_s, planner):
X_sensed = sense_obstacles(x0, r_s)
X_free = X - X_sensed
pi = []
x_i = x0
while not at_goal(x_i, x_goal):
sigma_i = planner(x_i, x_goal, X_free)
pi.append(sigma_i)
x_j = next_replan_point(sigma_i, r_s)
X_sensed = update_sensed_obstacles(x_j, r_s)
X_free = X - X_sensed
x_i = x_j
return concatenate_paths(pi) |
Experimental Evaluation
Simulated Environments
The approach was evaluated in three simulated 2D environments: Random Rectangles, Wall Gap, and Double Enclosure. Each environment presents distinct challenges in terms of obstacle density, narrow passages, and the need for backtracking upon discovering new obstacles.
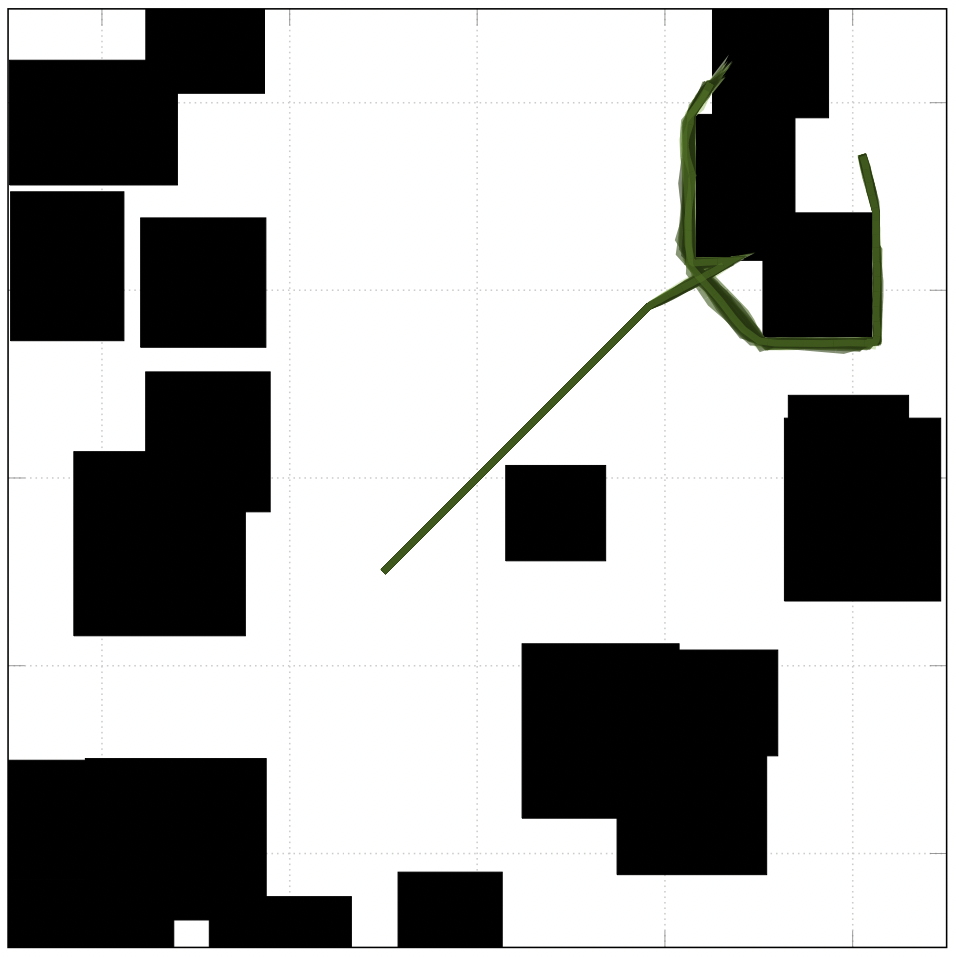
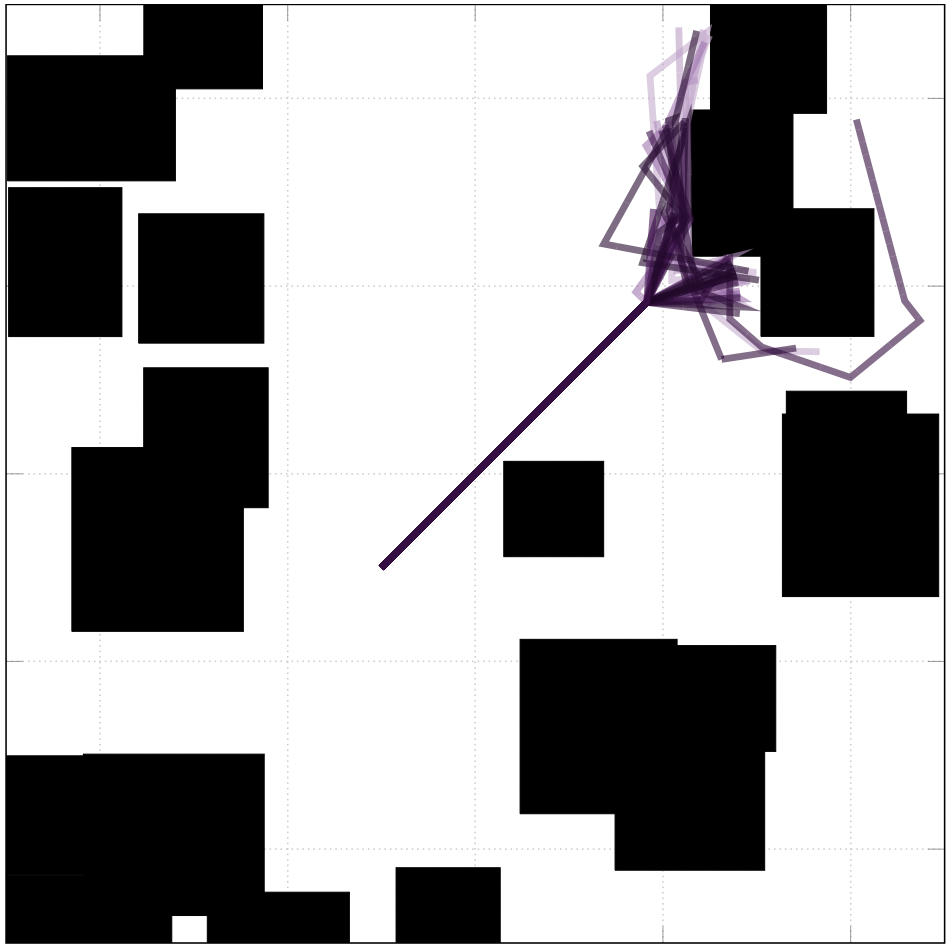
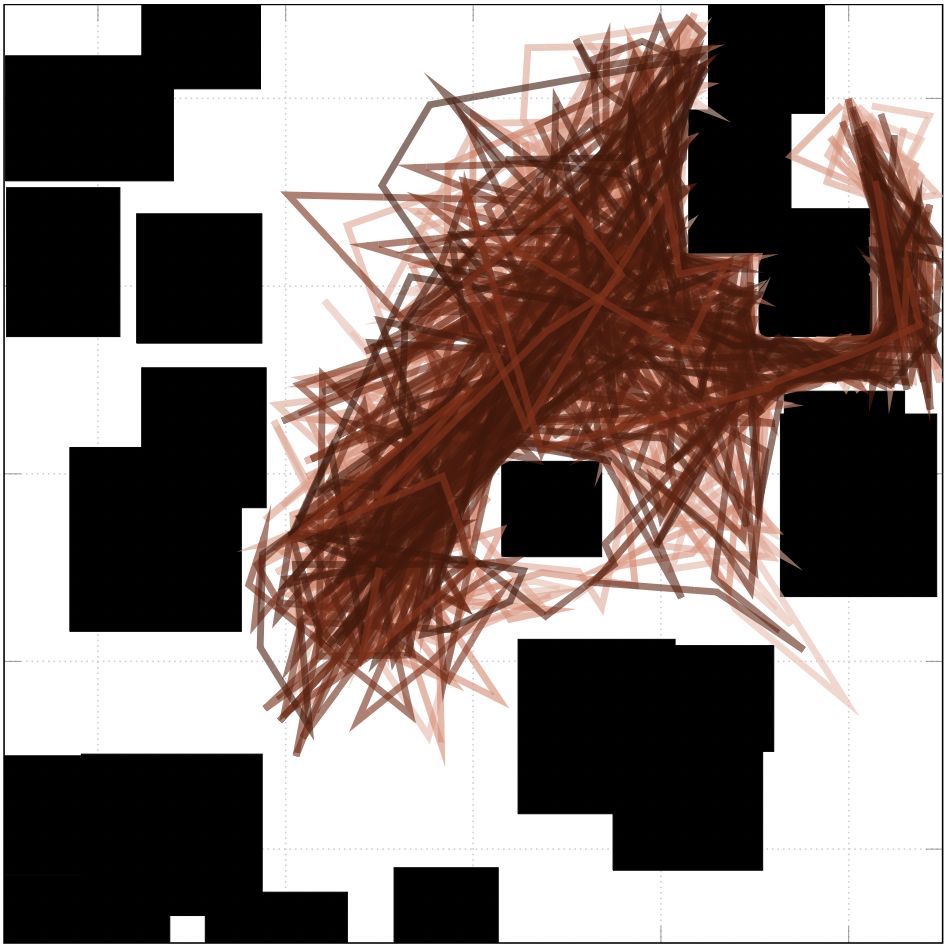
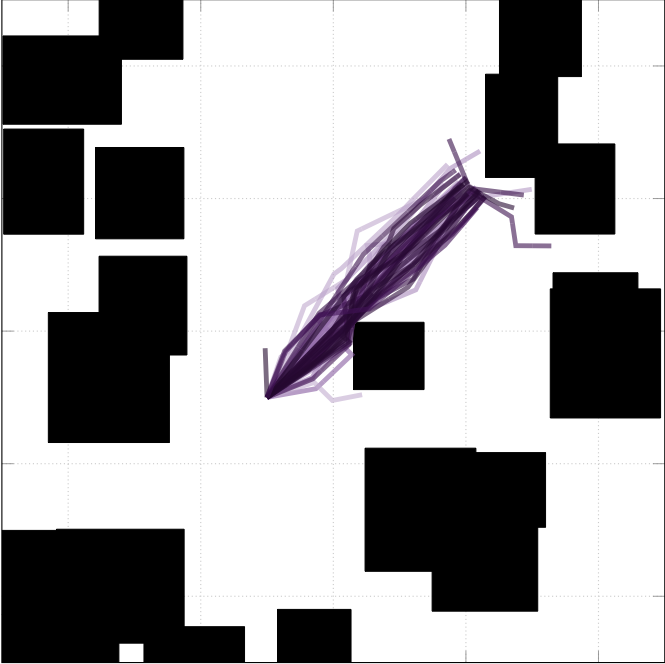
Figure 1: Visualization of paths traveled by EIT
, RRT*, RRT-Connect, and RRT\textsuperscript{X} over 50 incremental planning attempts, highlighting EIT*'s superior path quality and success rate.*
EIT* consistently achieved the highest success rates and shortest median global path lengths across all environments and planning budgets. Notably, EIT* maintained a 100% success rate in the Random Rectangles and Double Enclosure environments, where plan-reuse algorithms like RRT\textsuperscript{X} failed to find complete solutions in over 90% of trials due to the computational cost of tree rewiring.
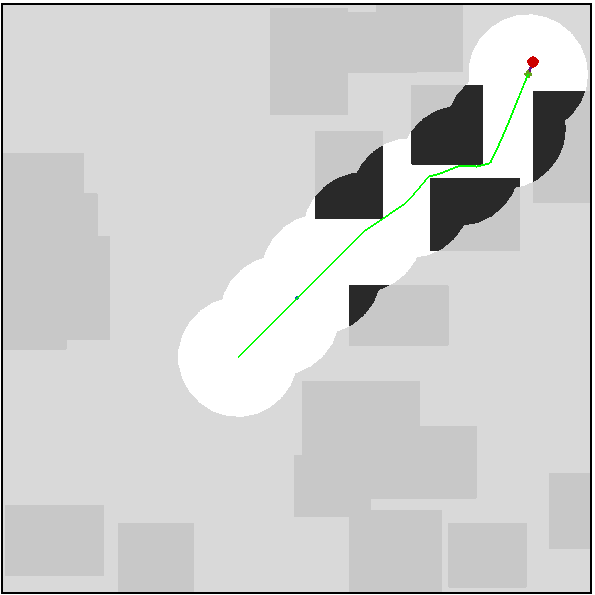
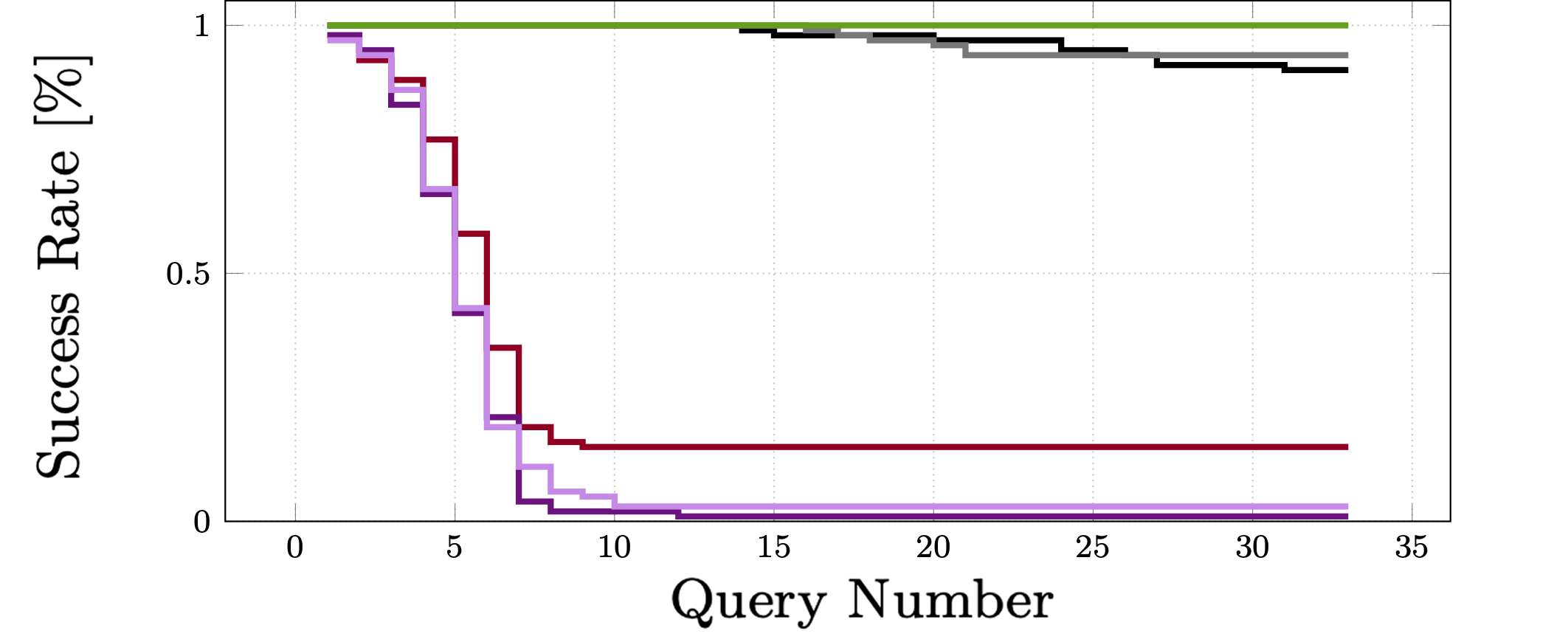
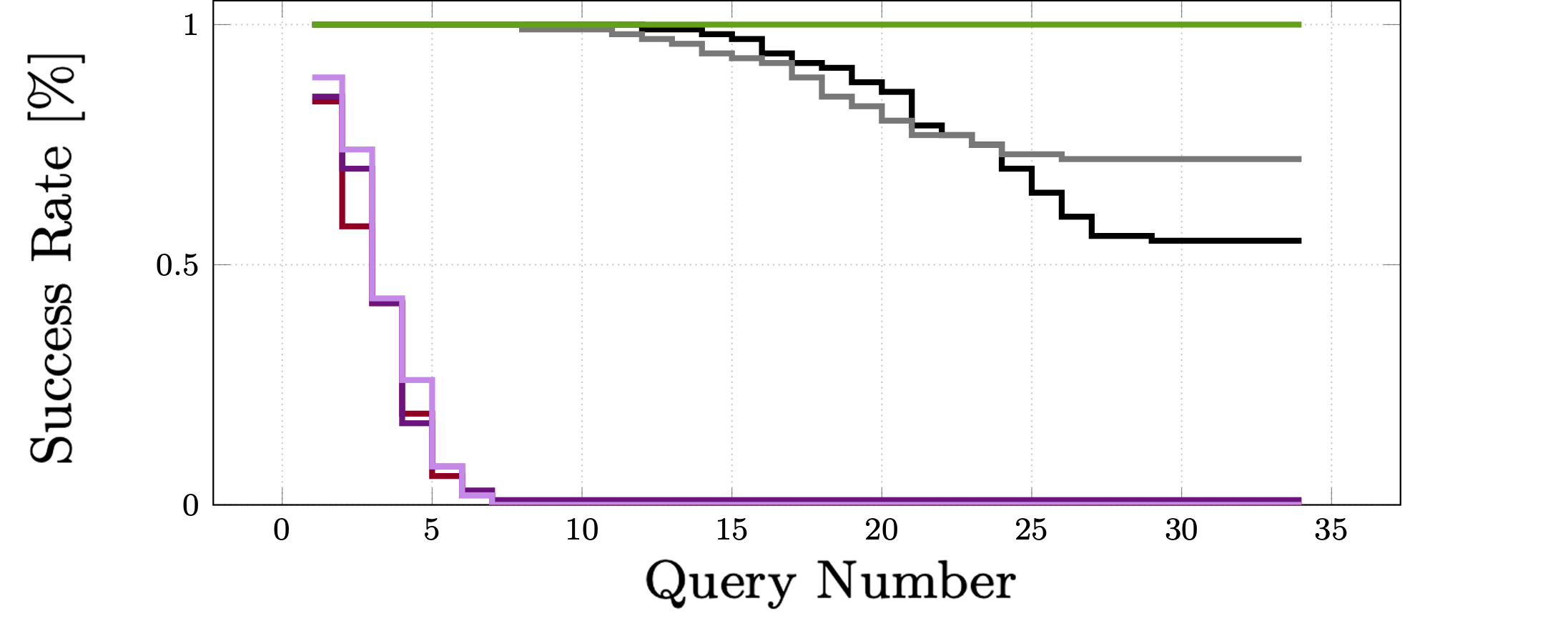
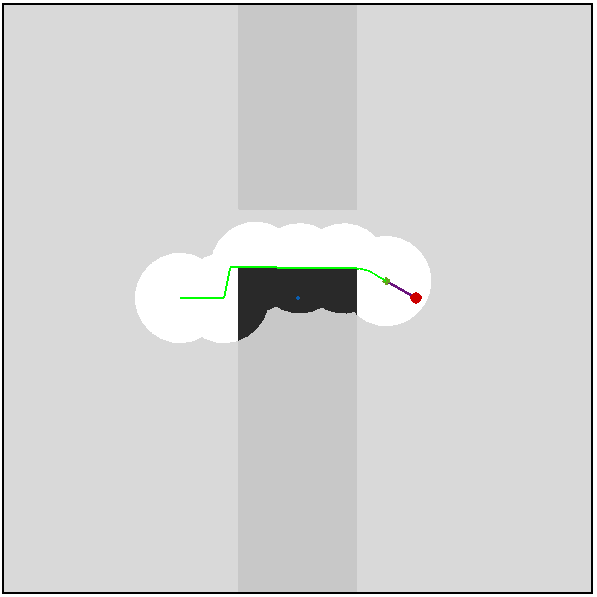
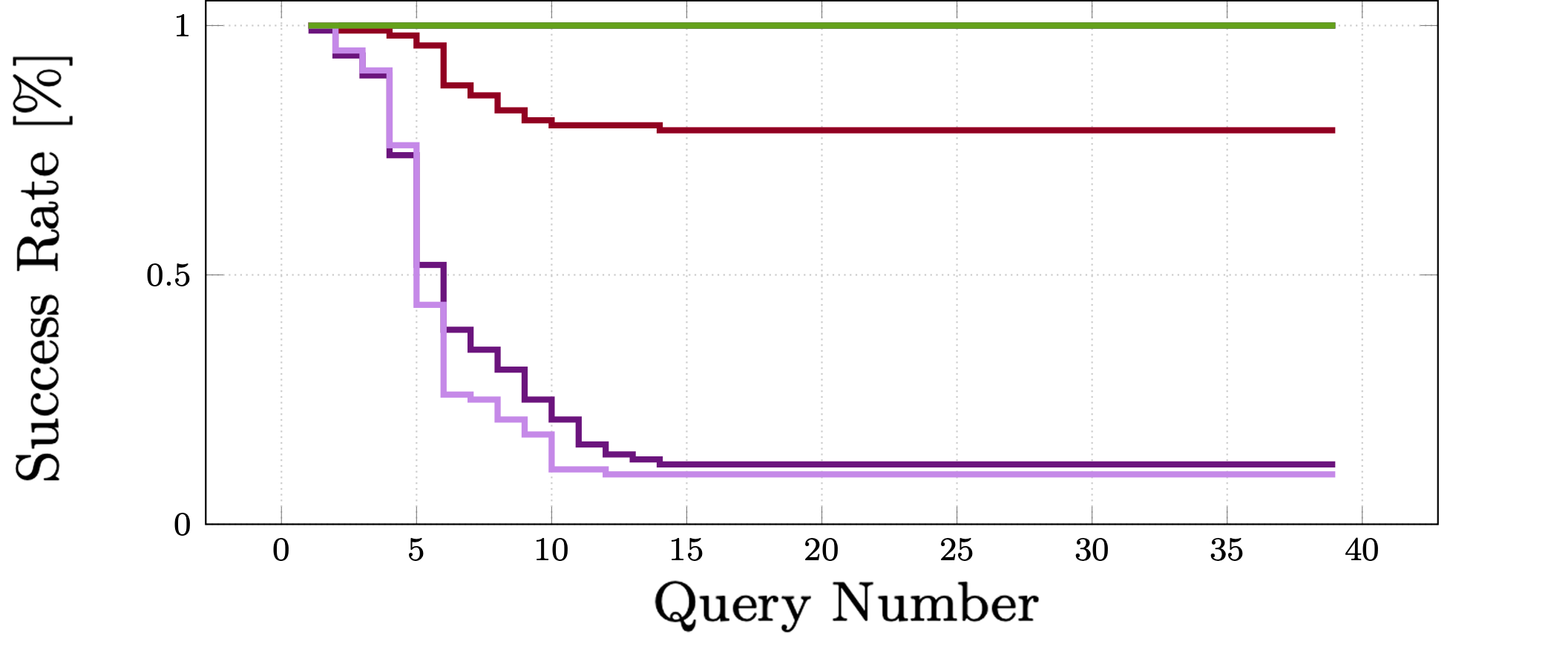
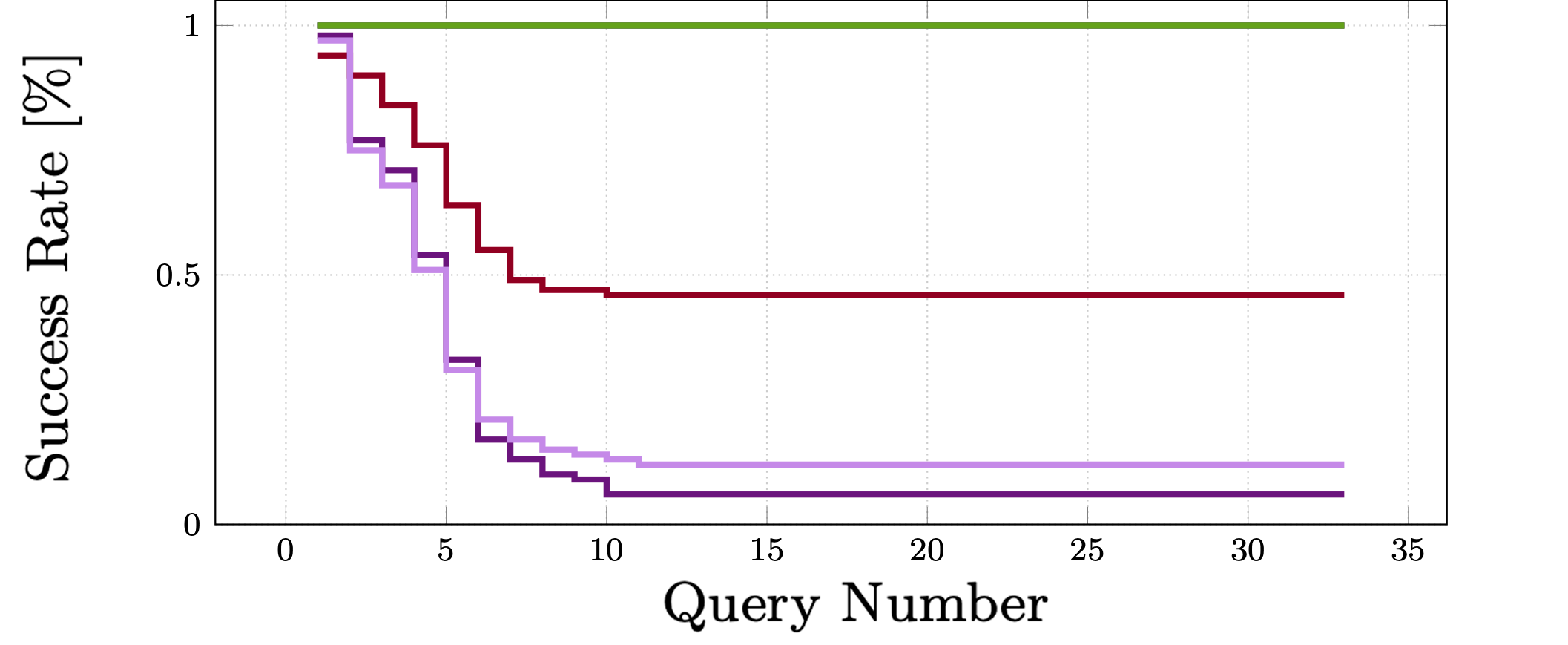
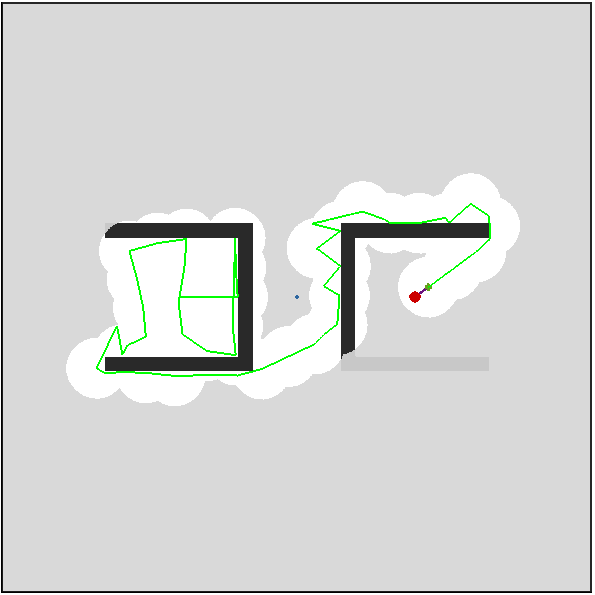
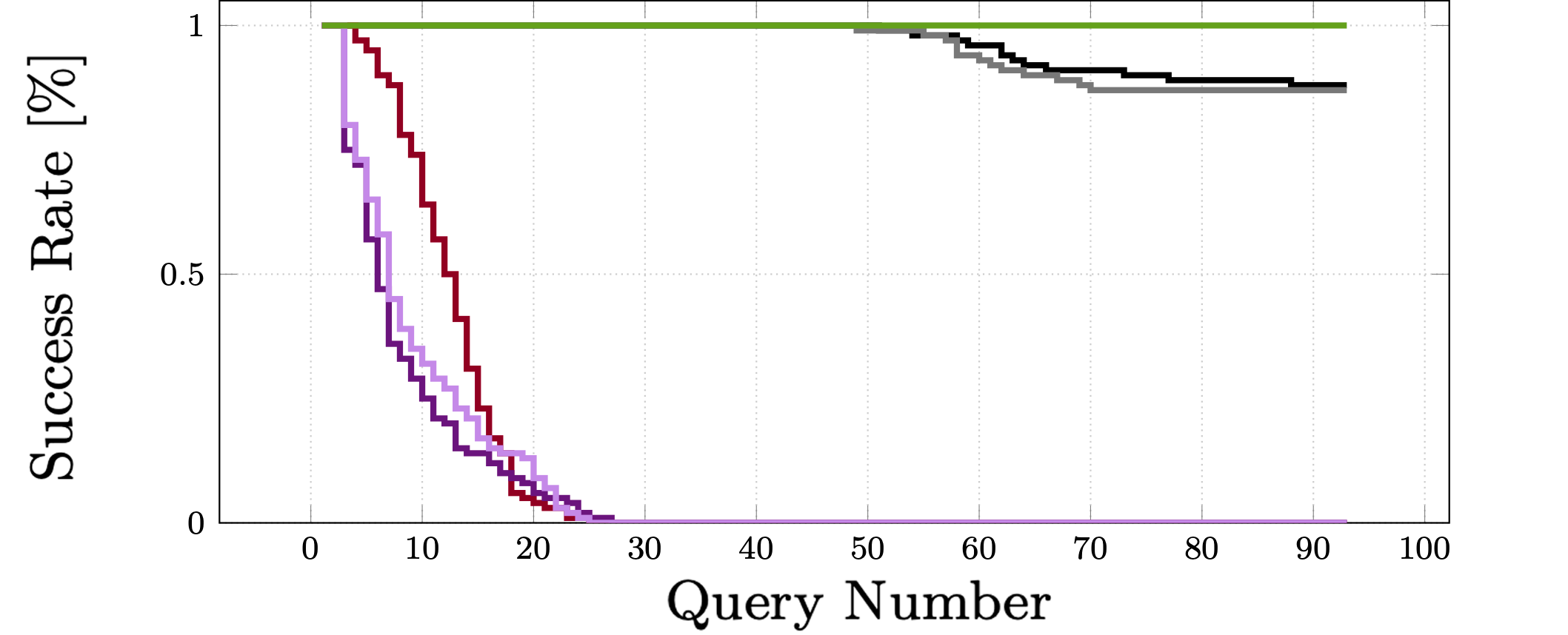
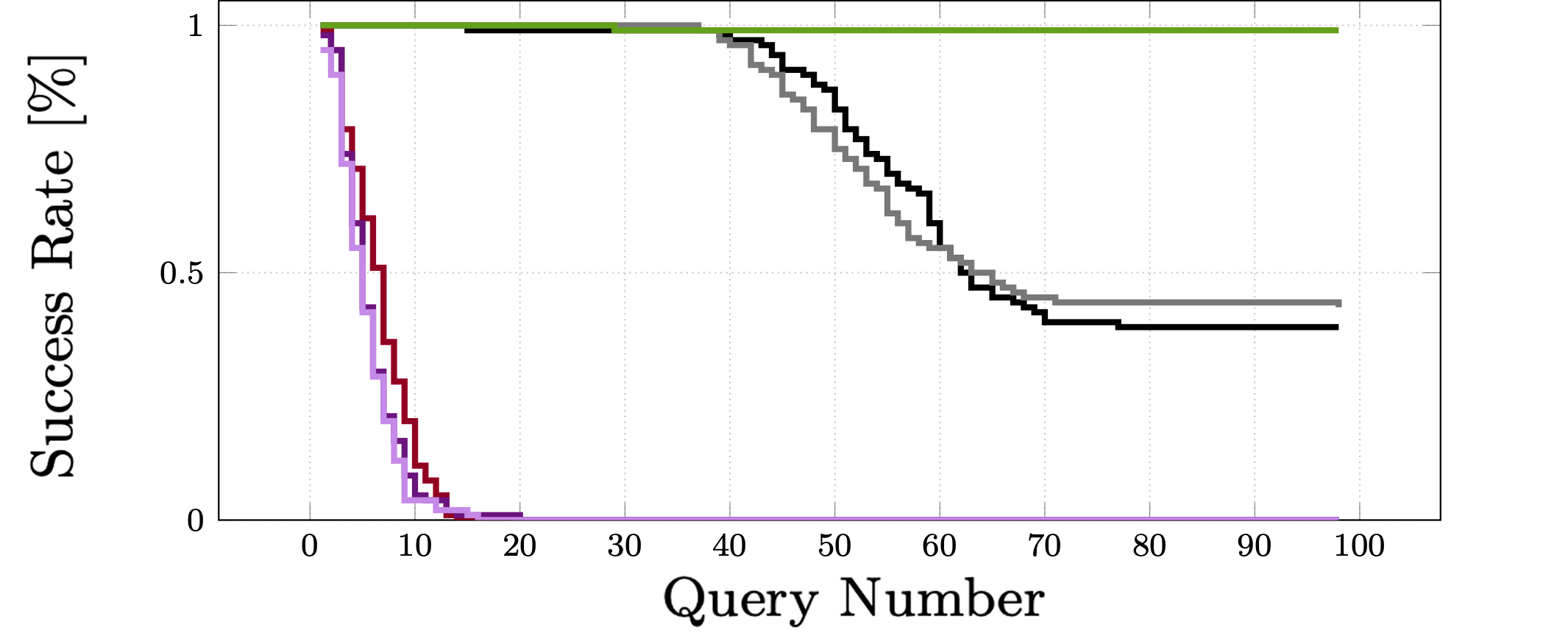

Figure 2: Success rates of all planners across 100 runs in three simulated worlds, with EIT
outperforming others at both 0.1s and 0.05s planning budgets.*
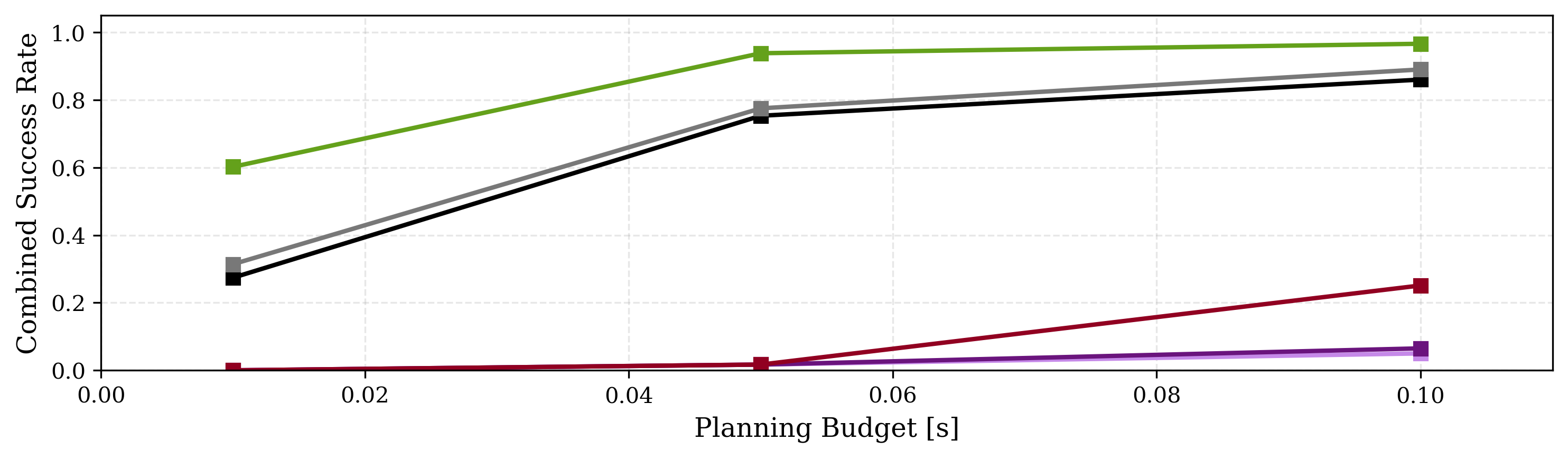
Figure 3: Combined success rate of each planner on 100 random worlds for planning budgets of 0.01s, 0.05s, and 0.1s, demonstrating EIT
's robustness to reduced planning time.*
Real-World Robotic Arm Experiment
A VAMP implementation of AORRTC was deployed on a Franka Research 3 arm to navigate around dynamic obstacles in real time. The planner was able to replan and execute new paths at control-level speeds, successfully avoiding obstacles without prior knowledge of their locations or motion.
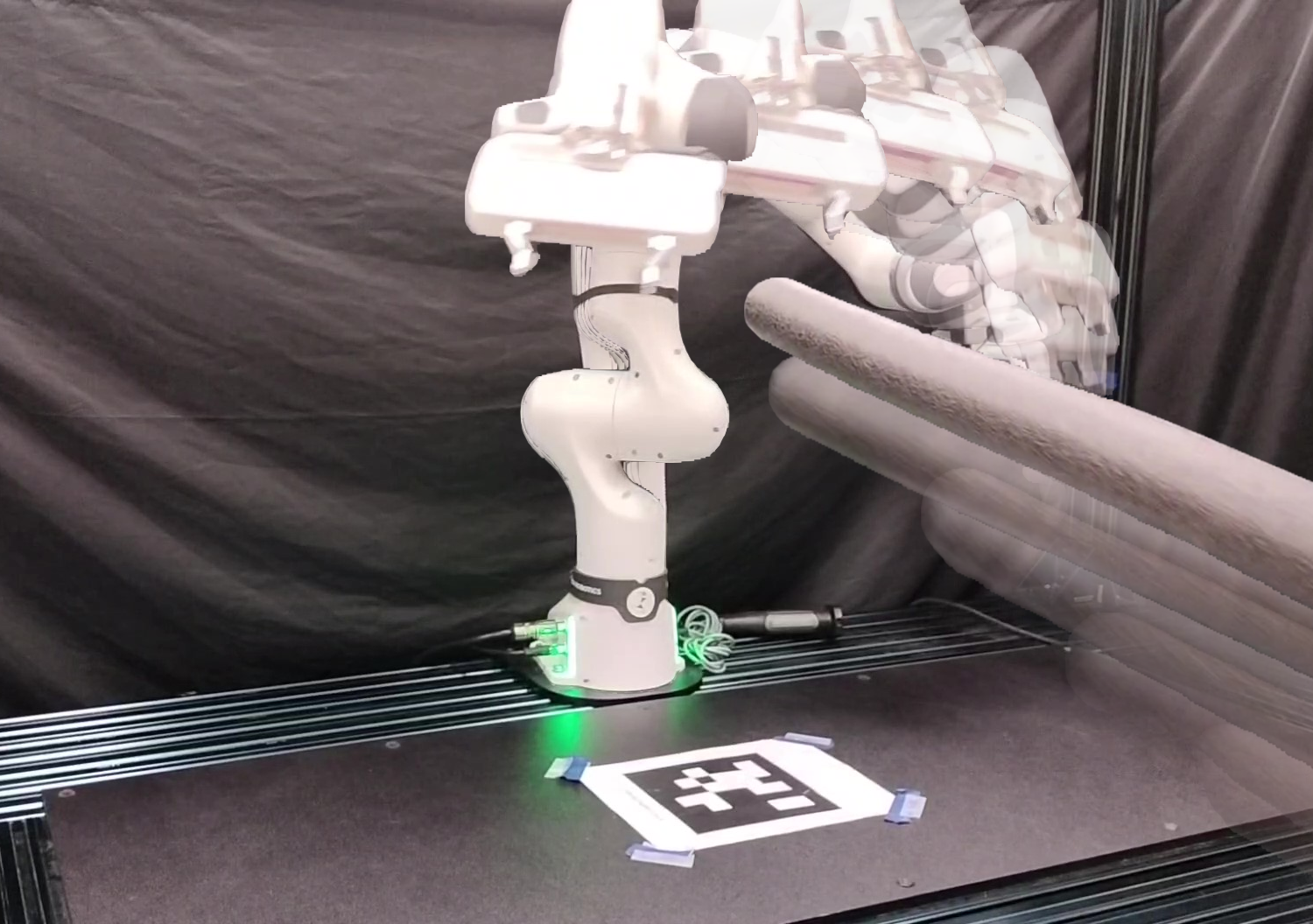
Figure 4: Franka Research 3 arm replanning around a dynamic obstacle by independently solving new planning problems as obstacle information changes.
Path Consistency and Homotopy
The experiments demonstrate that independent ASAO replanning naturally maintains path consistency and avoids unnecessary homotopy class switches, provided the intermediate solutions are near-optimal. This is in contrast to non-optimal planners (e.g., RRT-Connect), which often produce inconsistent paths and require more queries to reach the goal.
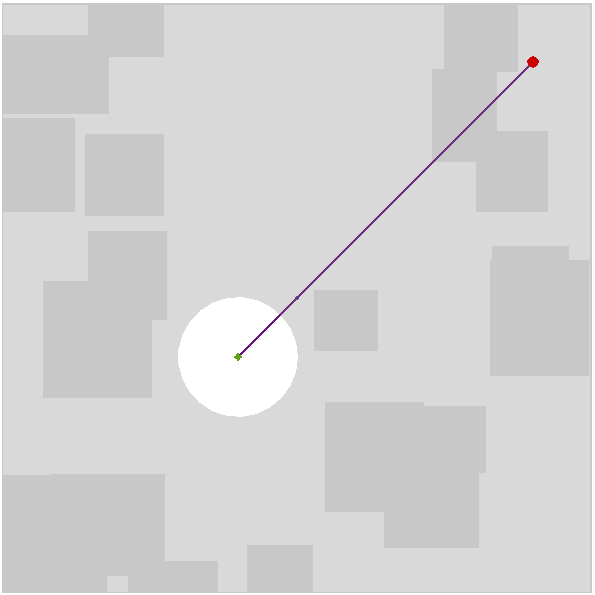
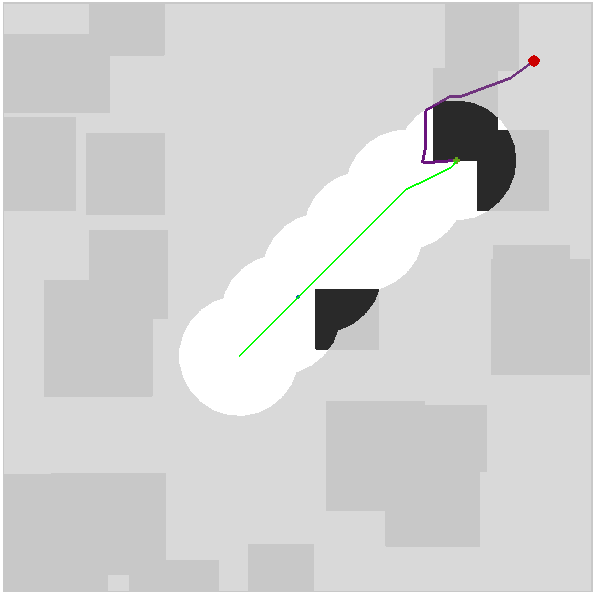
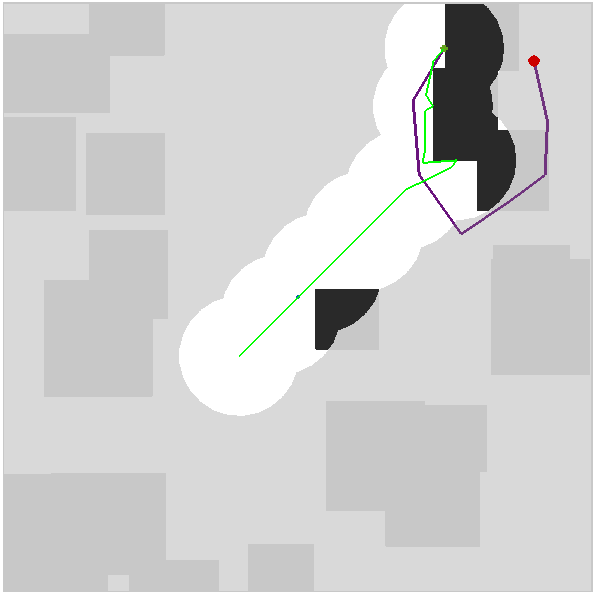
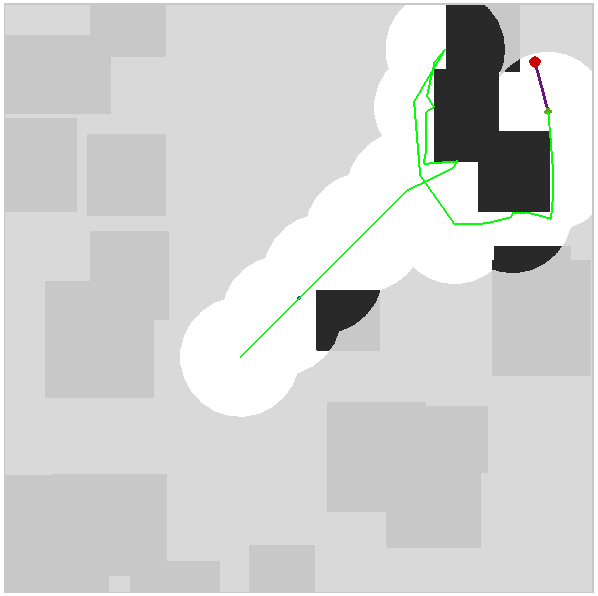
Figure 5: Visualization of intermediate paths found by EIT
with limited sensor range and planning budget, illustrating efficient exploration and path execution.*
Discussion
The empirical results substantiate the claim that independent replanning with fast ASAO planners is a viable and often superior strategy for incremental planning in dynamic environments. The approach obviates the need for complex mechanisms to detect and propagate changes in the environment, reducing implementation complexity and computational overhead. The only critical parameter is the planning budget, which should be maximized within system constraints to ensure high success rates and solution quality.
The failure of plan-reuse algorithms like RRT\textsuperscript{X} in these experiments is attributed to the cost of maintaining and repairing dense search trees, especially when obstacle changes are frequent and affect large portions of the tree. This cost increases with the planning budget, as more nodes are added between replanning events. In contrast, independent ASAO planners are unaffected by tree density and can exploit parallelization and hardware acceleration for further speedups.
Implications and Future Directions
The findings have significant implications for the design of motion planning systems in robotics. By leveraging fast ASAO planners, systems can achieve real-time, near-optimal replanning without reliance on prior models or complex plan-reuse infrastructure. This simplifies deployment in unstructured or unpredictable environments and enables robust operation in the presence of dynamic obstacles.
Future research directions include integrating obstacle prediction models with the independent ASAO approach to further improve solution quality in environments with highly dynamic obstacles, and extending the methodology to multi-agent and high-dimensional planning problems. Additionally, exploring hardware acceleration and parallelization strategies for ASAO planners could enable even faster replanning and broader applicability.
Conclusion
This paper demonstrates that independent incremental planning using fast ASAO planners, such as EIT* and AORRTC, can outperform traditional plan-reuse algorithms in both simulated and real-world dynamic environments. The approach yields higher success rates, shorter global paths, and reduced computational complexity, challenging the long-held assumption that plan reuse is necessary for efficient incremental planning. The results advocate for a paradigm shift in motion planning for robotics, emphasizing the utility of fast, optimal single-query planners for real-time incremental replanning.