Camera Splatting for Continuous View Optimization
Abstract: We propose Camera Splatting, a novel view optimization framework for novel view synthesis. Each camera is modeled as a 3D Gaussian, referred to as a camera splat, and virtual cameras, termed point cameras, are placed at 3D points sampled near the surface to observe the distribution of camera splats. View optimization is achieved by continuously and differentiably refining the camera splats so that desirable target distributions are observed from the point cameras, in a manner similar to the original 3D Gaussian splatting. Compared to the Farthest View Sampling (FVS) approach, our optimized views demonstrate superior performance in capturing complex view-dependent phenomena, including intense metallic reflections and intricate textures such as text.


Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper introduces a new way to decide where to place cameras when you want to build a high-quality 3D scene from photos or videos. The method is called “Camera Splatting.” It helps choose the most informative viewpoints so that a computer can later create realistic new views of the scene (like turning your head in VR) using fewer captured images.
Key Objectives
The paper tries to answer simple but important questions:
- If you can only take a limited number of pictures, which camera positions and directions should you choose?
- How can we make sure these views cover both the shape of the scene and tricky, view-dependent effects (like shiny reflections) well?
- Can we optimize all camera positions at the same time, in a smooth and flexible way, instead of picking one view at a time or only from a fixed set?
Methods and Approach (explained simply)
Think of building a 3D scene as teaching a computer what the world looks like from every position and direction. The computer stores this with something called a “radiance field,” which is just a fancy name for a function that tells you what color and brightness you’d see at any point in space, from any direction.
Here’s the core idea and analogy:
- 3D Gaussian Splatting: Imagine painting a 3D scene using many soft blobs of color (like puffs of spray paint) placed in 3D space. These “blobs” (Gaussians) can be drawn very fast and adjusted smoothly to match photos.
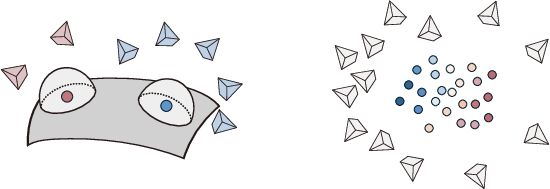
- Camera Splatting: The paper turns each camera into a special “blob” too. A “camera splat” is like a little soft spotlight with a position and direction. Because it’s a blob, the computer can smoothly nudge it around (move or rotate it) to improve coverage, just like adjusting knobs.
To decide if the cameras are placed well, the authors use “point cameras,” which are virtual tiny observers:
- Point Cameras: Imagine placing tiny all-seeing sensors on the surface of the scene (near where the objects actually are). Each sensor looks in all directions and checks which real cameras would see it and from how many angles.
- View-Dependency Score: Some surfaces (like shiny metal) look very different depending on the viewing direction. Others (like matte walls) look similar from most angles. The method assigns a score to each surface point that says how “direction-sensitive” it is. High score = needs more views; low score = fewer views are fine.
Putting it together:
- The system renders the “camera blobs” as seen by the point cameras. If a point needs lots of directional coverage (because it’s shiny), the image intensity should be higher (meaning more overlapping camera directions). If it’s matte, lower intensity is fine.
- The computer compares the rendered result to what it ideally wants (based on the view-dependency score) and then “nudges” the camera blobs—moving and rotating them—to better match the target. This “nudging” is done by gradient-based optimization, which is just a way to gradually improve settings based on feedback.
- Regularizers: The method adds gentle rules to avoid bad solutions, like forcing cameras to point toward the scene and keeping them within valid boundaries (so they don’t drift into empty space or all stack up in one place).
Why this is different:
- Continuous optimization: Cameras aren’t chosen from a fixed menu of positions. Instead, they can be placed anywhere and adjusted smoothly.
- Joint optimization: All cameras are improved together, not greedily one at a time. This helps avoid getting stuck in “local optima,” where early choices limit later ones.
- Efficient: Because it uses fast Gaussian splatting, it can optimize lots of views quickly (about a minute), which is much faster than some previous methods.
Main Findings and Why They Matter
What they found:
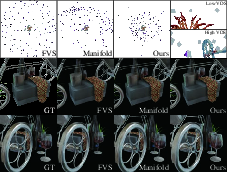
- Better close-up quality: Compared to common methods like Farthest View Sampling (FVS) and Manifold Sampling, Camera Splatting produced higher-quality results when evaluating views close to the scene. It captured tough, view-dependent details such as shiny metallic reflections and fine textures like text more accurately.
- Competitive at far views: While the pixel-level metric (PSNR) was sometimes slightly lower for far-away views (likely due to aliasing when training with many close-up views), structural quality (SSIM and LPIPS) stayed strong, meaning overall look and realism were preserved.
- Fast and scalable: Optimizing many camera views took around 1 minute, versus about 1 hour for some continuous methods. This makes it more practical for real projects.
- Adaptive sampling: Cameras naturally concentrate around parts of the scene that need more directional information (like shiny objects) and spread out less around parts that don’t (like flat, matte surfaces).
Why this matters:
- If you can only take a limited number of photos, Camera Splatting helps you use them wisely.
- It leads to more realistic 3D reconstructions with fewer images, especially for challenging materials.
Implications and Potential Impact
- Better capture for AR/VR: This can help people filming environments for virtual reality or augmented reality get better quality with fewer shots.
- Robotics and autonomous scanning: A robot could take a few initial images, then use this method to decide where to go next for the most useful views, making scanning faster and smarter.
- Film, gaming, and digital twins: Studios and engineers could save time and storage while still getting detailed, realistic digital versions of real places and objects.
A quick note on limits and future work
- The method relies on a “proxy geometry” (a rough initial reconstruction). If that initial geometry is very poor (for example, with lots of floating artifacts or very textureless scenes that confuse the model), view optimization can struggle.
- Future work could explore more robust ways to build or simplify the proxy geometry, so the method works well even in tricky scenes with plain walls or poor initial data.
Overall, Camera Splatting gives a smart, fast, and flexible way to decide where to put cameras so that computers can learn to render the 3D world from new viewpoints with high quality.
Knowledge Gaps
Knowledge Gaps, Limitations, and Open Questions
The following items identify what is missing, uncertain, or left unexplored in the paper and point to concrete directions for future work:
- Reliance on proxy geometry quality: the method degrades or fails when 3DGS proxy geometry is poor (e.g., with only 10 initial views or textureless regions). How can view optimization remain robust under inaccurate, sparse, or noisy proxies (e.g., uncertainty-aware optimization, coarse geometric priors, or joint proxy–view co-optimization loops)?
- Unspecified VDSF estimation: the View-Dependency Score Function (VDSF) is described as a data-driven cubic polynomial, but the paper does not detail how it is computed from sparse images, how it generalizes across materials, or how errors in VDSF affect optimized views. Can VDSF be learned from scene cues (normals, roughness, specularity) and calibrated to different material distributions?
- Missing anisotropic directional sampling: the target angular distribution at each point is uniform and merely scaled by VDSF. Many BRDFs exhibit anisotropic lobes (e.g., specular reflections oriented along the half-vector). How can the method target non-uniform, directionally biased sampling per point (e.g., per-point angular kernels inferred from reflectance)?
- Hard (binary) FoV visibility mask: the visibility indicator m_i uses a hard threshold on angle, introducing non-differentiability around the FoV boundary. What is the impact on optimization stability, and can soft visibility (e.g., logistic or cosine falloff) improve gradients and convergence?
- Intrinsics not optimized: field-of-view, opacity, and shared scale are fixed, and camera intrinsics (focal length, sensor size, lens distortion, exposure/HDR) are not modeled or optimized. How do variable intrinsics affect directional sampling density and reconstruction quality, and can intrinsics be included in the continuous optimization?
- Depth-normalized scaling side effects: scaling normalization by depth is used to mitigate foreshortening, but its bias on preferred camera distances or close-up vs far-view balance is unquantified. What normalization schemes yield better angular uniformity without skewing distance distributions?
- Occlusion modeling limitations: self-occlusion masks are rendered from proxy geometry, which can be wrong or incomplete. How robust is the optimization to occlusion errors, missing geometry, or dynamic occluders, and can uncertainty-aware occlusion or multi-view consistency regularization reduce failure modes?
- Lack of physical feasibility constraints: the framework does not incorporate robot kinematics, collision avoidance, environmental obstacles, or pose feasibility. How can trajectory planning and operational constraints be integrated so optimized views are executable in real environments?
- No convergence/optimality analysis: the paper provides empirical results but no theoretical guarantees or analysis of the loss landscape (e.g., existence of local minima, conditions for uniform coverage). Can convergence properties and optimality bounds for the joint continuous optimization be established?
- Sensitivity to point camera placement and density: the number, distribution, and sampling strategy for omnidirectional point cameras strongly influence the optimization, but design guidelines are absent. What principled placement strategies (e.g., curvature-, uncertainty-, or coverage-aware) maximize performance under budgets?
- Scalability limits and resource usage: the method claims scalability but does not quantify memory/compute complexity versus the number of camera splats and point cameras, nor GPU/CPU requirements. What are practical scaling limits, and how can batching, clustering, or hierarchical optimization extend capacity?
- Robustness to initial pose and calibration errors: the pipeline assumes accurate poses for sparse input images. How sensitive is Camera Splatting to pose/camera calibration noise, and can joint refinement of initial poses be incorporated to improve stability?
- Far-view aliasing: optimization favors close-up views, leading to aliasing and reduced far-view PSNR. What anti-aliasing strategies (e.g., multi-scale training, supersampling, mipmaps for 3DGS) mitigate this trade-off without sacrificing near-view gains?
- Transferability across radiance field methods: although claimed to be applicable to NeRF and others, experiments are limited to 3DGS. Does Camera Splatting improve view selection for NeRF, Instant-NGP, Plenoxels, or Gaussian surfels with consistent gains, and are any method-specific adaptations needed?
- No adaptive view count or densification: the approach does not add/remove camera splats during training and assumes a fixed budget. Can budget-aware mechanisms (e.g., densification, pruning, re-initialization of “dead” splats) improve coverage and reduce redundancy?
- Diversity/repulsion constraints: shared scale is used to discourage clustering, but explicit diversity regularizers (e.g., angular repulsion or blue-noise sampling in direction space) are not explored. Do such constraints improve directional uniformity and coverage?
- Orientation parameterization: camera rotations are optimized via rotation vectors; numerical stability and ambiguity are not discussed. Would quaternions or Lie-group (SO(3)) optimization improve convergence and avoid gimbal-related issues?
- Hyperparameter sensitivity: the weights of the directional and boundary regularizers, the coverage weight function, learning rates, and sampling policies are not systematically analyzed. What ranges are stable across scenes, and can automated tuning or meta-learning improve robustness?
- Real-world validation: results are on synthetic NSVF and two BlenderKit indoor scenes; no physical robot/handheld capture is reported. How does the method perform under real noise (lighting changes, motion blur, rolling shutter), and what engineering is needed for field deployment?
- Handling lens distortion and varied intrinsics: practical cameras exhibit radial/tangential distortion and varied sensor formats. How should the camera splat model incorporate distortion and per-view intrinsics calibration to maintain angular accuracy?
- Metrics beyond PSNR/SSIM/LPIPS: the paper uses image-level metrics and a limited Voronoi analysis; comprehensive directional coverage metrics (e.g., per-point spherical Voronoi statistics, angular discrepancy to target distributions) are not standardized. Can a benchmark and metrics be defined to evaluate directional sampling fidelity?
- VDSF learning and supervision: the source of supervision for VDSF (e.g., material labels, reflectance estimates, uncertainty maps) is unspecified. How can VDSF be robustly learned from sparse, noisy observations and generalized across scenes without overfitting?
- Failure handling for unused camera splats: boundary regularization prevents drifting, but mechanisms to detect, re-initialize, or re-allocate “unused” splats are not described. Can adaptive re-seeding improve coverage in challenging regions?
- Fairness of baselines and camera spaces: FVS and Manifold Sampling operate on different candidate spaces; the paper’s fairness protocols (e.g., close/far spheres, initial views) may still favor certain methods. Can standardized candidate spaces and evaluation protocols ensure unbiased comparisons?
Practical Applications
Immediate Applications
Below is a concise set of real-world use cases that can leverage the paper’s methods and findings now, with notes on sectors, potential tools/workflows, and feasibility assumptions.
- Radiance-field capture planning for drones and mobile robots
- Sectors: robotics, AEC/construction, cultural heritage, mapping
- Tools/workflows: integrate Camera Splatting into route planners (e.g., ROS-based NBV modules), augment RealityCapture/Metashape/Nerfstudio with an “Optimal View Advisor” that proposes additional viewpoints after a sparse scan
- Assumptions/dependencies: requires a reasonably accurate proxy geometry (e.g., from 20+ initial views); GPU and 3D Gaussian Splatting (3DGS) runtime; local airspace and safety compliance for aerial robots
- Reflectance-aware product digitization
- Sectors: e-commerce, manufacturing, advertising
- Tools/workflows: capture assistants that place virtual point cameras across a product, compute VDSF (View-Dependency Score Function), and guide operators to viewpoints that better sample shiny/metallic finishes; automatic scheduling of photo booths for optimal angles under a fixed camera budget
- Assumptions/dependencies: calibrated cameras; proxy geometry obtainable from a fast sparse scan; robust VDSF parameters for the target material classes
- View planning for VFX/AR/VR assets
- Sectors: media/entertainment, gaming
- Tools/workflows: plugins for DCC tools (e.g., Blender, Unreal) or volumetric stages to propose re-shoot angles; a “view distribution heatmap” overlay to fill directional sampling gaps, reducing re-capture time
- Assumptions/dependencies: existing NeRF/3DGS pipelines; human operators to follow suggested viewpoints; adequate lighting and calibration data
- Active view selection in indoor facility mapping
- Sectors: AEC/facilities management, real estate
- Tools/workflows: handheld or tripod capture assistants that update optimal next viewpoints in near real time (~1 minute optimization), emphasizing regions with high view-dependency (glass, polished stone)
- Assumptions/dependencies: initial sparse scan free of severe artifacts; proxy geometry with reasonable occlusion masks; access permissions for indoor spaces
- Digital heritage scanning with limited budgets
- Sectors: cultural heritage, museums
- Tools/workflows: field kits that precompute optimal camera placements around artifacts; reflective areas (metal, glaze) get denser angular sampling; logs for documentation and repeatability
- Assumptions/dependencies: conservation constraints (no contact, limited lighting); proxy geometry must be captured without damaging artifacts; trained staff to comply with suggested views
- Autonomous NBV for warehouse items and equipment
- Sectors: logistics, industrial maintenance
- Tools/workflows: robotic arms or mobile platforms reposition inspection cameras to improve radiance-field coverage of shiny components; angular uniformity ensured by shared-scale camera splats and occlusion-aware loss
- Assumptions/dependencies: safe motion planning; calibrated intrinsics/extrinsics; proxy geometry not dominated by textureless planes
- Curriculum and benchmarking for view optimization research
- Sectors: academia/education
- Tools/workflows: teaching modules that compare greedy NBV vs. joint continuous optimization; reproducible benchmarks with NSVF and BlenderKit scenes; ablation on VDSF and regularizers
- Assumptions/dependencies: access to datasets and GPUs; basic familiarity with 3DGS and differentiable rendering
- Energy/computational cost reduction via fewer yet better views
- Sectors: software/compute, sustainability
- Tools/workflows: quantifying ROI: improved PSNR/SSIM/LPIPS under limited camera budgets; integrating “view budget optimizers” into pipelines to reduce redundant captures and training cycles
- Assumptions/dependencies: pipeline supports view suggestion iterations; performance depends on scene characteristics (high reflectance gains most)
- Smartphone capture guidance for home scanning
- Sectors: consumer apps, insurance, interior design
- Tools/workflows: AR overlays that suggest next best viewpoints; “reflectance-aware hints” for glossy objects (TV screens, appliances)
- Assumptions/dependencies: on-device or cloud proxy geometry; privacy-aware indoor scanning; robust performance with mobile sensors
- Quality assurance in digital twin creation
- Sectors: AEC, industrial operations
- Tools/workflows: QA dashboards showing directional sampling uniformity per region; alerts for under-sampled surfaces; automatic scheduling of follow-up captures
- Assumptions/dependencies: standardized data formats for radiance fields; team workflows for iterative capture; tolerance for ~1 minute optimization latency
Long-Term Applications
The following use cases are feasible with further research, scaling, or systems integration. They extend the paper’s core innovations (camera splats, point cameras, VDSF, joint continuous optimization) into larger or more autonomous settings.
- Multi-agent autonomous capture fleets for city-scale mapping
- Sectors: smart cities, mapping, infrastructure
- Tools/workflows: coordinated drones using joint continuous view optimization over large areas; dynamic VDSF updates from material recognition; cloud-based global optimization
- Assumptions/dependencies: scalable proxy geometry generation; robust communications; regulatory approvals; advanced occlusion handling across agents
- Real-time adaptive multi-camera arrays for volumetric studios
- Sectors: media/entertainment, telepresence
- Tools/workflows: automatically reposition camera rigs to maximize view-dependent fidelity of performers (hair, fabric, metallic costumes) in real time
- Assumptions/dependencies: motorized mounts, accurate calibration, high-throughput differentiable rendering; latency constraints and safety compliance
- Standards and policy for capture budgets and reflectance-aware sampling
- Sectors: policy, cultural heritage, AEC
- Tools/workflows: best-practice guidelines that allocate camera budgets based on VDSF-driven material analysis; standardized reporting of view distributions and coverage
- Assumptions/dependencies: consensus-building across institutions; validated VDSF across material catalogs; privacy and safety frameworks for indoor/outdoor scanning
- End-to-end autonomous NBV integrated with task planning
- Sectors: robotics, industrial inspection
- Tools/workflows: coupling Camera Splatting with manipulation/navigation to plan both where to move and where to look; closed-loop with uncertainty-aware radiance fields
- Assumptions/dependencies: robust perception-action loops; failure recovery in textureless or repetitive environments; improved proxy geometry under sparse conditions
- On-device, low-power guidance for consumer and professional scanners
- Sectors: mobile devices, prosumer hardware
- Tools/workflows: hardware-accelerated camera splat rendering; persistent VDSF models tailored to common materials; edge inference for rapid feedback
- Assumptions/dependencies: optimized kernels for mobile GPUs/NPUs; compact proxy geometry estimators; UX that balances guidance with user autonomy
- Hybrid pipelines combining photogrammetry and radiance-field sampling
- Sectors: photogrammetry, surveying
- Tools/workflows: unified view planning that simultaneously optimizes geometric constraints and view-dependent appearance; switching strategies based on scene zones (diffuse vs reflective)
- Assumptions/dependencies: fusion of MVS constraints with radiance-field losses; robust handling of parallax, occlusion, and mixed materials at scale
- Automatic material-aware capture policies
- Sectors: manufacturing, cultural heritage, retail
- Tools/workflows: on-the-fly material classification to adjust VDSF; specialized policies for glass, metal, fabric; automated “reflectance budget allocators”
- Assumptions/dependencies: accurate material recognition; domain-specific VDSF training; controlled lighting to avoid confounding highlights
- Continuous digital twin maintenance with scheduled re-captures
- Sectors: facilities management, infrastructure
- Tools/workflows: periodic view re-optimization as environments change (furniture, machinery); prioritization of regions with degraded angular sampling
- Assumptions/dependencies: lifecycle management; change detection; scalable storage and versioning of radiance fields
- Robust proxies for textureless or degenerate scenes
- Sectors: research, AEC
- Tools/workflows: fallback coarse geometry or semantic priors to stabilize point camera placement; adaptive regularizers for low-feature regions
- Assumptions/dependencies: new proxy-generation techniques; improved occlusion masks; modified loss terms to avoid failure cases observed in uniformly colored walls
- Cloud “Camera Splatting as a Service”
- Sectors: software/SaaS
- Tools/workflows: APIs that accept sparse captures and return optimal camera poses, VDSF heatmaps, and capture schedules; integration with capture apps and robotics platforms
- Assumptions/dependencies: standardized input formats; secure data handling; scalable GPU backends; SLAs for latency and accuracy
Glossary
- 3D Gaussian: A Gaussian distribution in three-dimensional space used as a rendering primitive. "In 3DGS, each 3D Gaussian is characterized by parameters such as a position , a covariance matrix , opacity , and color represented with spherical harmonics."
- 3D Gaussian Splatting (3DGS): A real-time radiance field rendering technique that projects 3D Gaussian primitives to images via splatting and alpha blending. "Recently, 3D Gaussian Splatting (3DGS)~\cite{kerbl20233d} is proposed to represent the radiance field effectively."
- ActiveNeRF: A method that uses uncertainty estimation to guide view selection for NeRF-based reconstruction. "ActiveNeRF~\cite{pan2022activenerf} defines uncertainty as color variance estimated from each spatial position and trains the variance using NeRF~\cite{mildenhall2020nerf} framework."
- Aerial Path Planning (APP): A continuous optimization method for selecting aerial viewpoints to improve reconstruction. "Aerial Path Planning (APP)~\cite{smith2018aerial} introduces reconstructability heuristics for stereo matching by leveraging pairwise relationships among views."
- Alpha blending: A compositing technique that blends colors based on opacity to approximate volume rendering. "For rendering, these primitives are projected onto the 2D image plane, and their colors are combined using alpha blending."
- Bundle adjustment: A joint optimization of camera parameters and 3D structure to minimize reprojection error across multiple views. "Offsite Aerial Path Planning (OAPP)~\cite{zhou2020offsite} employs bundle adjustment for the optimization."
- Camera budget: The limited number of camera views available for capturing a scene. "Given limited camera budgets, identifying informative views is essential for effectively reconstructing a radiance field..."
- Camera Splatting: The proposed continuous view optimization framework that represents cameras as 3D Gaussians and optimizes them differentiably. "In this paper, we propose a novel continuous view optimization framework, called Camera Splatting, which enables joint optimization of multiple views."
- Camera splat: A specialized 3D Gaussian that encodes camera parameters (position, orientation, scale, FoV, opacity) for optimization. "In Camera Spaltting, we model the physical cameras as specialized 3D Gaussians called camera splats ."
- Candidate views: A predefined discrete set of camera positions used by some optimization methods. "most existing methods rely on discrete optimization such as view selection from candidate views~\cite{yi2023render, pan2022activenerf, jiang2023fisherrf, kopanas2023improving, zhou2020offsite, beder2006determining, dunn2009next}."
- Cosine similarity: A measure of alignment between two vectors, used to regularize camera orientations. "we calculate the cosine similarity between the vector which directs from to , and the camera splat's rotation vector ."
- Covariance matrix: The matrix describing the spatial spread and orientation of a 3D Gaussian primitive. "In 3DGS, each 3D Gaussian is characterized by parameters such as a position , a covariance matrix , opacity , and color represented with spherical harmonics."
- Densification: The process of adding more Gaussian primitives over time to improve representation. "While the 3DGS framework employs densification to progressively increase the number of Gaussians, our framework does not adopt densification for camera splats."
- Directional regularizer: A loss term encouraging camera orientations to point toward undersampled scene regions. "The directional regularizer is defined as:"
- Downhill simplex method: A derivative-free optimization algorithm used to optimize camera sets in some view planning approaches. "While APP leverages the downhill simplex method to optimize the view set, Offsite Aerial Path Planning (OAPP)~\cite{zhou2020offsite} employs bundle adjustment for the optimization."
- Farthest View Sampling (FVS): A view selection strategy that picks views farthest from existing ones to maximize coverage. "Compared to the Farthest View Sampling (FVS) approach, our optimized views demonstrate superior performance in capturing complex view-dependent phenomena..."
- Field-of-view (FoV): The angular extent of the scene captured by a camera. "These include its center position , rotation vector , uniform scale , field-of-view (FoV) , and opacity :"
- Fisher Information: A measure of the amount of information a variable carries about unknown parameters, used to guide view selection. "FisherRF~\cite{jiang2023fisherrf} leverages Fisher Information derived from the Hessian matrix of the loss function to select views that maximize information gain."
- FisherRF: A method that uses Fisher Information to select informative views for radiance field reconstruction. "FisherRF~\cite{jiang2023fisherrf} leverages Fisher Information derived from the Hessian matrix of the loss function to select views that maximize information gain."
- Gaussian primitives: The set of 3D Gaussian entities used to represent scene content in 3DGS. "Point cameras are then placed on the Gaussian primitives of the optimized 3DGS, and the view dependency information is obtained..."
- Gaussian splatting pipeline: The computational framework that renders and optimizes 3D Gaussian primitives efficiently. "Integrated into a Gaussian splatting pipeline, our approach can efficiently and simultaneously optimize a large number of views."
- Greedy next-best-view: An iterative strategy that selects one next view at a time, potentially leading to local optima. "Others employ a greedy next-best-view optimization strategy~\cite{lyu2024manifold, chen2024gennbv, lee2022uncertainty, zhan2022activermap}, iteratively selecting views one by one."
- Hessian matrix: The second-derivative matrix of a loss function, used to compute Fisher Information. "FisherRF~\cite{jiang2023fisherrf} leverages Fisher Information derived from the Hessian matrix of the loss function to select views that maximize information gain."
- KinectFusion: A 3D reconstruction method that builds geometry from RGB-D data, used here to obtain proxy geometry. "3D reconstruction methods (e.g., KinectFusion~\cite{kinectfusion})."
- Mean Squared Error (MSE): A loss function measuring the average squared difference between predicted and target images. "we define the image loss $\mathcal{L}_{\text{image}$ as the Mean Squared Error (MSE) between the rendered camera splat images $I_{\text{render}$ and the ground truth images $I_{\text{gt}$."
- Multi-view geometry: The set of geometric constraints and techniques arising from multiple camera views. "Early researches on view optimization focused on geometry reconstruction with constraints from multi-view geometry"
- NeRF: Neural Radiance Fields, a neural representation that maps 3D coordinates and viewing directions to color and density. "NeRF~\cite{mildenhall2020nerf}"
- Omnidirectional: Capturing or sensing uniformly in all directions; used to describe point cameras. "Each point camera is omnidirectional, allowing it to measure the directional sampling density from all visible views at its position."
- Opacity: The alpha value of a Gaussian primitive controlling its contribution to rendered images. "Since camera splats share a fixed opacity value, the rendered image reflects both the coverage and density of the directional sampling."
- Perspective foreshortening: The apparent change in size due to depth, which must be normalized during optimization. "This normalization mitigates perspective foreshortening, encouraging that all camera splats have identical scales in image space."
- Point camera: A virtual camera placed at a 3D point to evaluate directional sampling of camera splats. "We evaluate the camera splats by rendering them from virtual cameras called point cameras ."
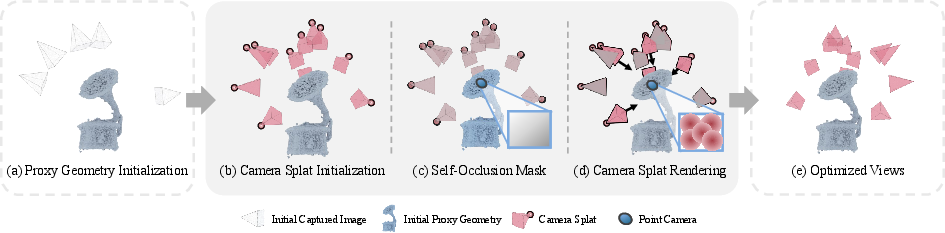
- Proxy geometry: An approximate scene geometry used to guide view optimization and point camera placement. "Given a proxy geometry and view dependency information on the geometry, % sparse initial views encoding rough scene appearance, our framework simultaneously optimizes all camera views to adaptively sample the radiance field."
- Radiance field: A continuous function over position and viewing direction that returns color and density for volumetric rendering. "Central to this task is the radiance field, a continuous representation encoding both scene geometry and view-dependent appearance~\cite{mildenhall2020nerf, barron2022mipnerf360, fridovich2022plenoxels, kerbl20233d}."
- Self-occlusion mask: A visibility mask computed from proxy geometry to discount occluded directions during optimization. "we introduce a self-occlusion mask $I_{\text{occ}(P_i)$, computed by rendering the proxy geometry from each point camera (\Fig{occlusion})."
- Spherical harmonics: Basis functions on the sphere used to represent view-dependent color of Gaussians. "In 3DGS, each 3D Gaussian is characterized by parameters such as a position , a covariance matrix , opacity , and color represented with spherical harmonics."
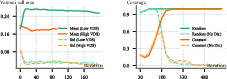
- Spherical Voronoi diagrams: A partition of the sphere into cells around directional samples, used to assess uniformity and density. "We measure the density and directional uniformity for each point camera with spherical Voronoi diagrams~\cite{caroli2010robust} of camera splats as shown in the left graph of \Fig{vds_ablation}."
- Stereo matching: A technique to infer 3D structure by matching features across multiple images. "Aerial Path Planning (APP)~\cite{smith2018aerial} introduces reconstructability heuristics for stereo matching by leveraging pairwise relationships among views."
- Transmittance: The cumulative transparency along a ray, determining how much radiance passes through. "where the represents the rendered radiance along ray , and denotes the accumulated transmittance."
- View Dependency Score (VDS): A scalar indicating how strongly a point’s appearance varies with viewing direction, guiding directional sampling density. "We validate our core rationale of directional adjustment guided by the View Dependency Score (VDS)."
- View-Dependency Score Function (VDSF): A function estimating view dependency at each point to scale target sampling density. "To achieve this, we introduce a View-Dependency Score Function (VDSF), a predefined function that estimates the view dependency of each point on the proxy geometry (\Fig{occlusion})."
- View-dependent appearance: Appearance that changes with viewing direction due to material and lighting effects. "These views should adaptively sample the radiance field based on the geometry and view-dependent appearance of the scene."
Collections
Sign up for free to add this paper to one or more collections.