Viser: Imperative, Web-based 3D Visualization in Python
Abstract: We present Viser, a 3D visualization library for computer vision and robotics. Viser aims to bring easy and extensible 3D visualization to Python: we provide a comprehensive set of 3D scene and 2D GUI primitives, which can be used independently with minimal setup or composed to build specialized interfaces. This technical report describes Viser's features, interface, and implementation. Key design choices include an imperative-style API and a web-based viewer, which improve compatibility with modern programming patterns and workflows.
Summary
- The paper introduces an imperative, web-based 3D visualization library in Python that bridges the gap between simple tools and domain-specific applications in computer vision and robotics.
- It leverages a rich set of 3D scene and 2D GUI primitives with handle-based lifecycle management, enabling real-time data streaming and interactive visualization.
- The design emphasizes rapid prototyping and seamless integration into Python workflows while addressing limitations like WebSocket overhead and single-process server constraints.
Viser: Imperative, Web-based 3D Visualization in Python
Introduction and Motivation
Viser is introduced as a 3D visualization library tailored for computer vision and robotics, with a focus on providing both ease of use for simple visualization tasks and extensibility for complex, domain-specific applications. The library addresses the dichotomy in existing visualization tools: lightweight, general-purpose libraries that are easy to use but limited in scope, and domain-specific packages that offer advanced features at the cost of generality and integration complexity. Viser aims to bridge this gap by offering a comprehensive set of 3D scene and 2D GUI primitives, an imperative-style API, and a web-based viewer, all designed for seamless integration into Python-centric workflows.
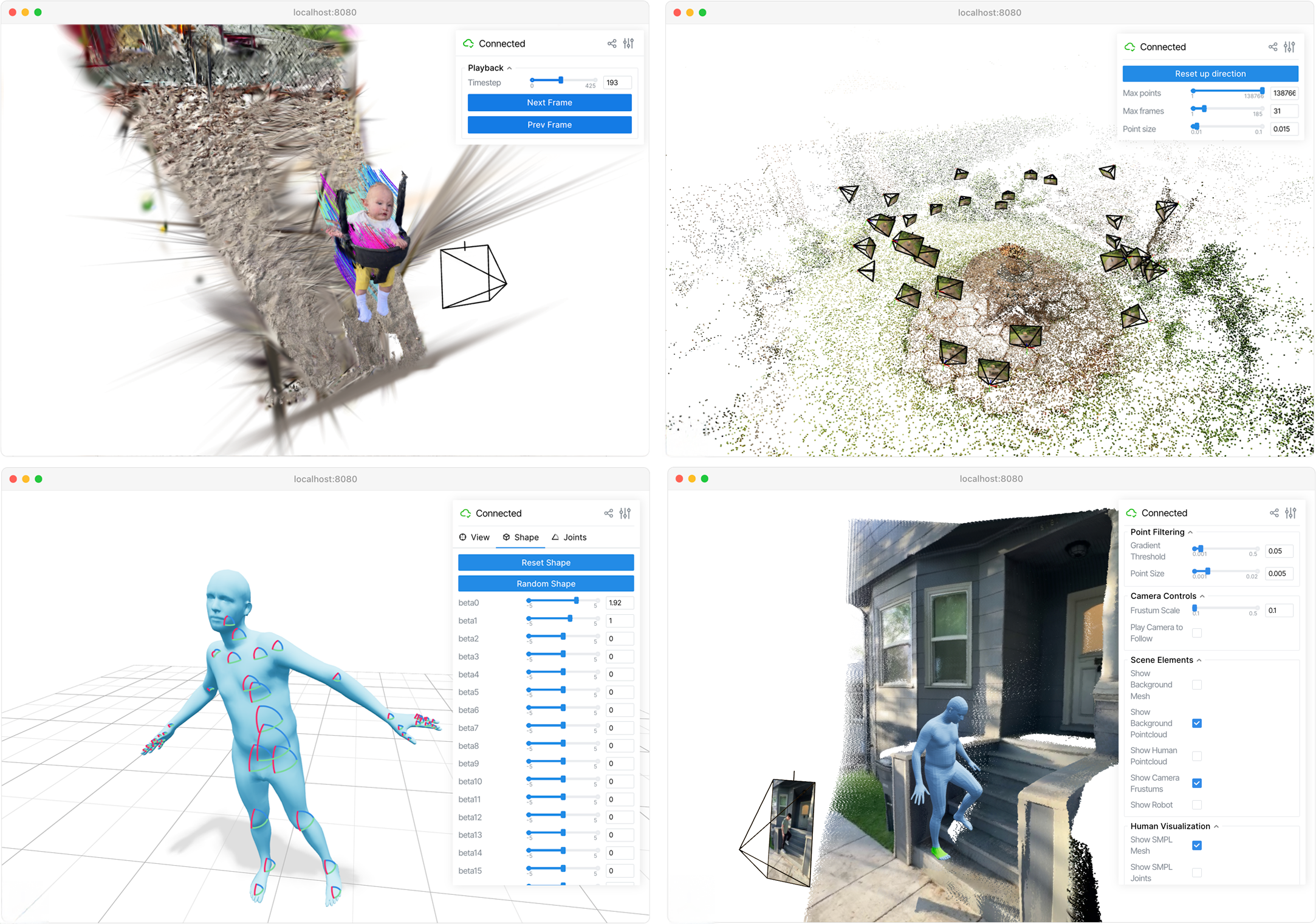
Figure 1: Viser's web-based viewer and composable primitives enable visualization for a wide range of computer vision tasks, including dynamic scene rendering, camera pose visualization, and interactive model control.
Core Features
Web-based Viewer
Viser automatically launches a local visualization server, exposing a viewer accessible from any modern web browser. This architecture offers several advantages:
- Platform Agnosticism: The web-based approach ensures compatibility across operating systems, headless servers, and mobile devices.
- Ease of Sharing: Visualizations can be embedded in static webpages or shared via URLs, facilitating collaboration and reproducibility.
- Rapid Development: Leveraging mature web technologies (React, three.js) accelerates feature development and UI iteration.
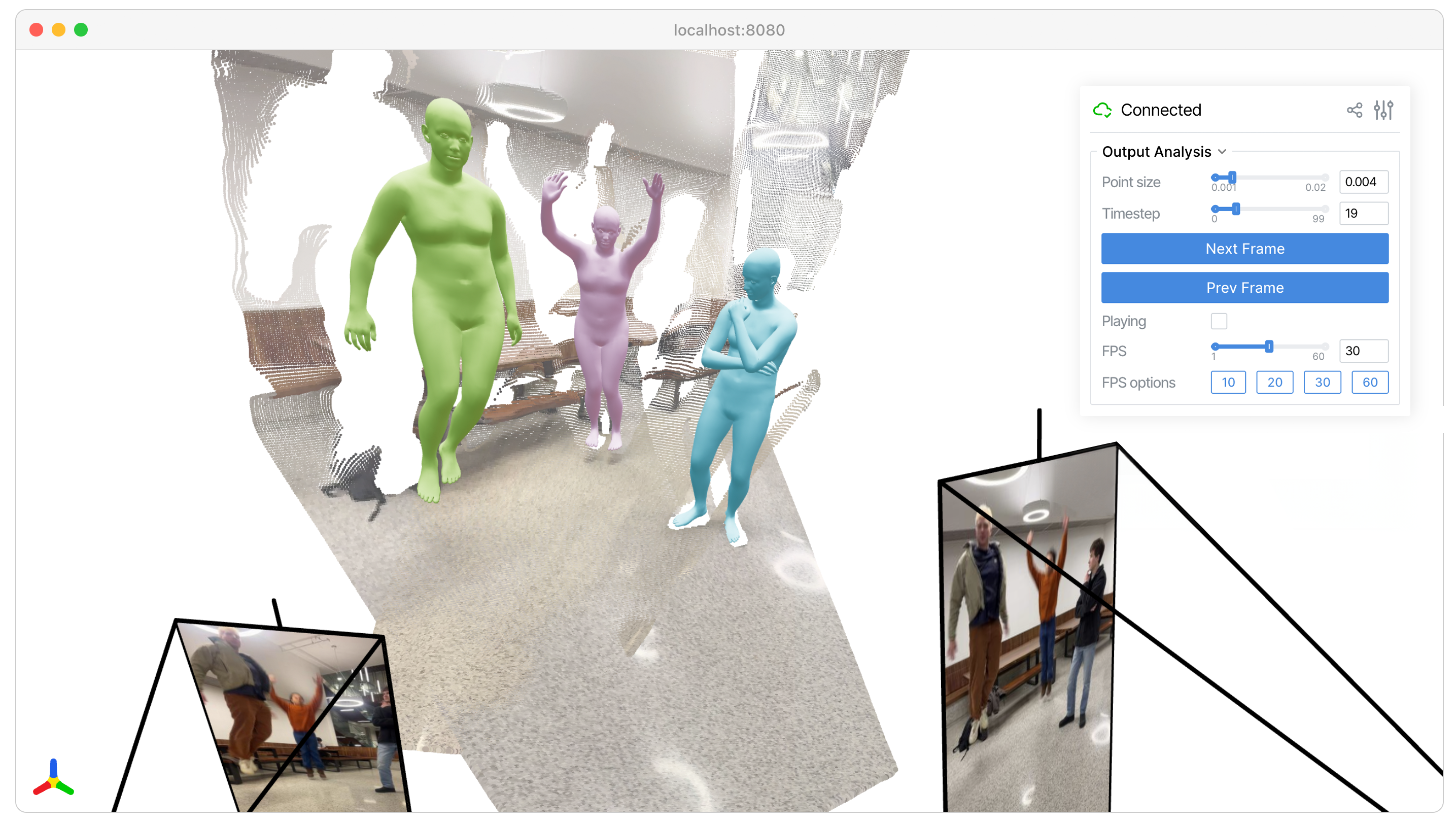
Figure 2: The web-based client, with both the 3D scene and GUI specified directly in Python, exemplifies Viser's integration into standard Python workflows.
Scene Primitives
Viser provides a rich set of 3D primitives, including point clouds, meshes, images, Gaussian splats, coordinate frames, frustums, and more. Key capabilities include:
- Direct Loading of 3D Assets: Support for GLB and glTF formats enables integration with existing datasets and assets.
- Hierarchical Scene Graph: Facilitates complex coordinate transformations and kinematic relationships, essential for robotics and multi-camera setups.
- Physically-based Rendering: The rendering pipeline supports PBR materials, environment maps, advanced lighting, and shadow mapping, producing high-quality visuals suitable for both debugging and presentation.
- Real-time Data Streaming: State synchronization between Python and web clients is optimized for dynamic data, supporting neural network training, simulation, and live sensor feeds.
- Interactivity: Objects can be made interactive (clickable, draggable), and a camera API allows programmatic viewpoint control.
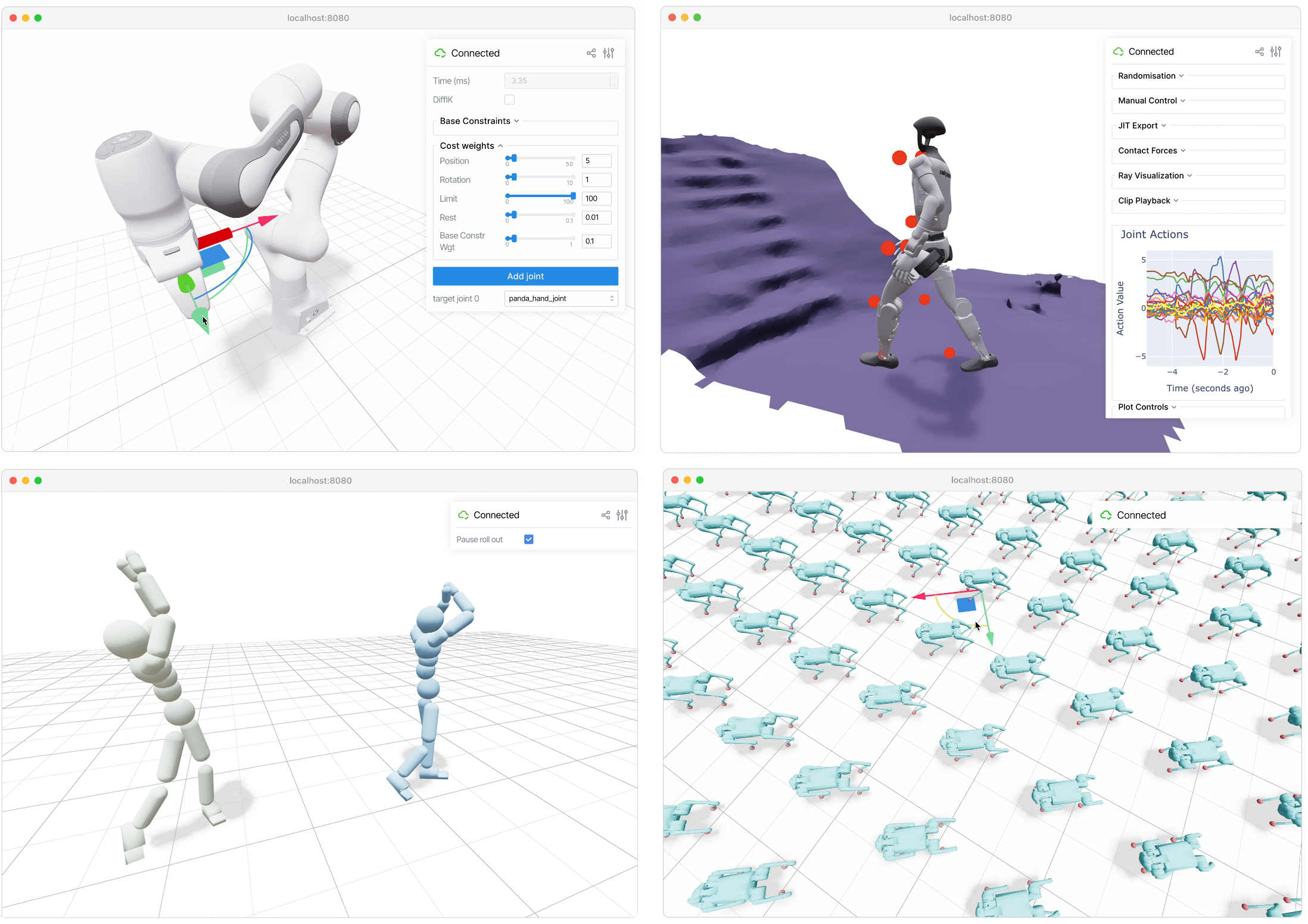
Figure 3: Viser's primitives are leveraged for robotics applications, such as interactive inverse kinematics, policy rollout visualization, and parallel simulation rendering.

Figure 4: Real-time visualization and live debugging of perception and control systems on physical robots, enabled by Viser's web-based architecture.
GUI Primitives
The 2D GUI system in Viser is designed for rapid construction of custom interfaces:
- Standard Controls: Buttons, sliders, checkboxes, text inputs, dropdowns, and more, all accessible via single function calls.
- Rich Information Display: Inline rendering of text, markdown, HTML, and 2D images; integration with Plotly and uPlot for plotting.
- Complex Layouts: Folders, tab groups, and modal dialogs support scalable, organized interfaces; GUI containers can be embedded in 3D scenes for spatially contextual controls.
API Design: Imperative Programming Model
Viser adopts an imperative-style API, diverging from the declarative paradigms prevalent in Python visualization (e.g., Gradio, Streamlit). This design is characterized by:
- Explicit Side Effects: Scene and GUI elements are created, updated, and removed via direct function calls and property assignments, with immediate effect on the visualization.
- Handle-based Lifecycle Management: Each primitive returns a handle for property updates and event registration, supporting fine-grained control and real-time synchronization.
- Bidirectional Communication: User interactions in the browser are propagated back to Python, enabling both polling and callback-based event handling.
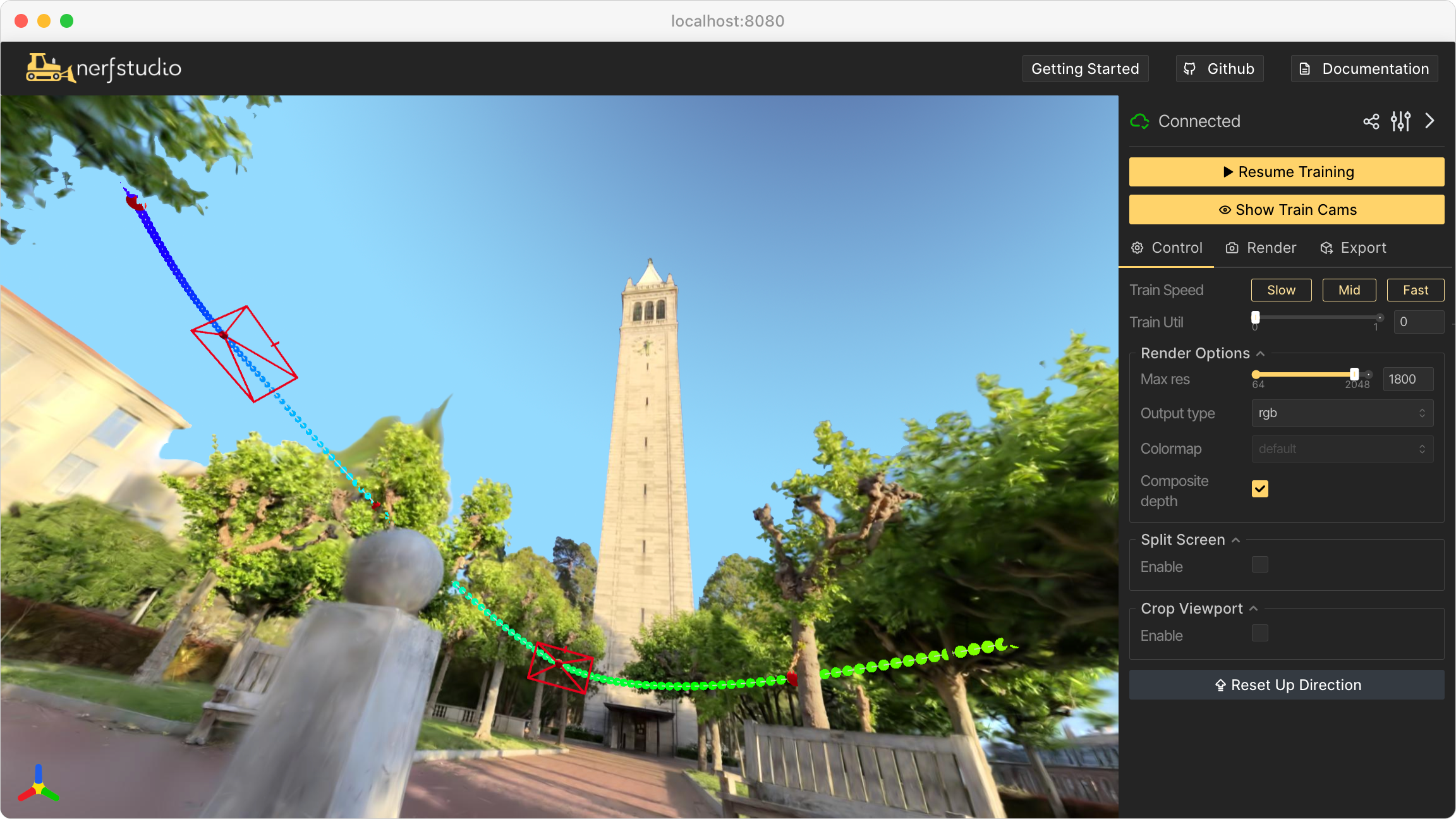
Figure 5: Nerfstudio, a domain-specific tool for neural radiance field visualization, is built atop Viser's primitives, demonstrating extensibility and real-time rendering capabilities.
This imperative approach is motivated by the need for tight integration with interactive Python environments (notebooks, REPLs, debuggers) and complex, stateful applications. While declarative APIs simplify certain workflows, they often restrict user control over program flow and state management, which is critical in research and engineering contexts.
System Architecture
Viser's architecture is organized into four layers:
- Core API: High-level methods for object creation, server configuration, and client management.
- Handles: Encapsulate lifecycle and state management for each primitive, exposing property setters/getters and event registration.
- Transport Layer: Manages communication between Python and web clients via WebSockets, with batching, deduplication, and type-safe serialization (msgpack, Python-to-TypeScript codegen).
- Client: The browser-based frontend mirrors server state, renders the scene (WebGL), and relays user interactions.
Figure 2: The web-based client, with the scene and user interface specified in Python.
This layered design abstracts away networking and synchronization complexities, allowing users to focus on visualization logic without concern for underlying implementation details.
Limitations
The paper identifies several limitations inherent to Viser's design:
- WebSocket Overhead: All assets are transferred via WebSockets, introducing latency and precluding direct CPU-to-GPU optimizations.
- Stateful API: The imperative, stateful model can lead to duplicated or error-prone state management compared to declarative or immediate-mode APIs.
- Python-only: No bindings for C++/Rust, limiting adoption in performance-critical or non-Python systems.
- Single-process Server: Each script launches its own server, complicating integration with multi-process systems common in robotics.
- Lack of Temporal Structure: No built-in support for timestamped or sequential data, increasing boilerplate for sequence visualization.
- Limited Serialization: Minimal support for loading/playing back serialized data formats (rosbag, MCAP, rrd).
Practical and Theoretical Implications
Viser’s design choices have several implications for both research and engineering:
- Accelerated Prototyping: The imperative API and web-based viewer lower the barrier for rapid visualization, debugging, and iteration in computer vision and robotics pipelines.
- Extensibility: The composable primitives and handle-based lifecycle management facilitate the construction of complex, domain-specific tools (e.g., Nerfstudio, custom robot debuggers).
- Integration with Modern Workflows: Seamless operation in notebooks and interactive environments aligns with contemporary research practices.
- Trade-offs: The stateful, Python-centric approach prioritizes flexibility and user control at the expense of some performance and scalability optimizations available in lower-level or declarative systems.
Future Directions
Potential avenues for future development include:
- Multi-language Support: Providing C++/Rust bindings to broaden applicability in high-performance systems.
- Enhanced Serialization and Playback: Integrating support for common robotics and vision data formats to facilitate offline analysis and reproducibility.
- Optimized Data Transfer: Exploring direct GPU memory transfer and more efficient asset streaming to reduce latency and bandwidth requirements.
- Declarative API Layer: Offering an optional declarative interface for users who prefer higher-level abstractions, without sacrificing the imperative core.
Conclusion
Viser represents a significant contribution to the ecosystem of visualization tools for computer vision and robotics, offering a unique combination of imperative, Pythonic control and web-based accessibility. Its design enables both rapid prototyping and the construction of sophisticated, interactive visualization systems. While certain limitations remain, Viser’s architecture and API provide a robust foundation for future research and development in 3D visualization, with broad applicability across academic and industrial domains.
Paper to Video (Beta)
No one has generated a video about this paper yet.
Whiteboard
No one has generated a whiteboard explanation for this paper yet.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Open Problems
We haven't generated a list of open problems mentioned in this paper yet.
Continue Learning
- How does Viser compare to other 3D visualization tools in terms of performance and ease of integration?
- What benefits does the web-based viewer offer for collaborative debugging in robotics applications?
- In what scenarios does the imperative API provide better control than declarative approaches in visualization?
- How can practitioners mitigate the challenges associated with WebSocket overhead and state management in Viser?
- Find recent papers about real-time 3D visualization.
Related Papers
- Immersive and Collaborative Data Visualization Using Virtual Reality Platforms (2014)
- ARviz -- An Augmented Reality-enabled Visualization Platform for ROS Applications (2021)
- ActiVis: Visual Exploration of Industry-Scale Deep Neural Network Models (2017)
- tsdownsample: high-performance time series downsampling for scalable visualization (2023)
- OpEn: Code Generation for Embedded Nonconvex Optimization (2020)
- Radiance Fields for Robotic Teleoperation (2024)
- Blendify -- Python rendering framework for Blender (2024)
- Toward Bundler-Independent Module Federations: Enabling Typed Micro-Frontend Architectures (2025)
- Vision6D: 3D-to-2D Interactive Visualization and Annotation Tool for 6D Pose Estimation (2025)
- ALE-Bench: A Benchmark for Long-Horizon Objective-Driven Algorithm Engineering (2025)
Collections
Sign up for free to add this paper to one or more collections.
Tweets
Sign up for free to view the 4 tweets with 506 likes about this paper.
YouTube
alphaXiv
- Viser: Imperative, Web-based 3D Visualization in Python (30 likes, 0 questions)