Global thermodynamic manifold for conservative control of stochastic systems
Abstract: Optimal control of stochastic systems plays a central role in nonequilibrium physics, with applications in the study of biological molecular motors and the design of single-molecule experiments. While exact analytic solutions to optimization problems are rare, under slow driving conditions, the problem can be reformulated geometrically solely in terms of equilibrium properties. In this framework, minimum-work protocols are geodesics on a thermodynamic manifold whose metric is a generalized friction tensor. Here, we introduce a new foundation for this friction-tensor formalism for conservatively driven systems. Under complete control of the potential energy, a global thermodynamic manifold (on which points are identified with instantaneous energy landscapes) has as its metric a full-control friction tensor. Arbitrary partial-control friction tensors arise naturally as inherited metrics on submanifolds of this global manifold. Leveraging a simple mathematical relationship between system dynamics and the geometry of the global manifold, we derive new expressions for the friction tensor that offer powerful tools for interpretation and computation of friction tensors and minimum-work protocols. Our results elucidate a connection between relaxation and dissipation in slowly driven systems and suggest optimization heuristics. We demonstrate the utility of these developments in three illustrative examples.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Knowledge Gaps
Knowledge gaps, limitations, and open questions
The following points identify what remains missing, uncertain, or unexplored, and are framed to enable concrete follow-up work:
- Extend the framework beyond conservative control: derive a friction tensor and manifold geometry for nonconservative driving (e.g., explicitly time-dependent forces that are not gradients), and characterize how antisymmetric/metric-like structures enter the excess work.
- Generalize to underdamped and nonreversible dynamics: formulate the global manifold and friction tensors when detailed balance is broken (complex spectra, non-normal generators), and determine conditions ensuring positive-definiteness or suitable generalizations of the metric.
- Quantify the validity and error of the linear-response approximation: develop systematic higher-order response corrections and tight bounds on excess work as a function of protocol duration and the generator’s spectrum, with diagnostics that can be applied prior to optimization.
- Analyze behavior near critical points and in metastable systems: characterize divergences or ill-conditioning in the friction tensor due to critical slowing down and rare-event dynamics, and design regularizations or coarse-grained treatments compatible with geodesic-based optimization.
- Remove restrictive assumptions on continuous-state systems: relax λ-convexity and discrete-spectrum requirements; specify what spectral/functional-analytic conditions are minimally needed for the operator and spectral decompositions to hold in multimodal or nonconvex potentials.
- Constructive identification of complete control sets: provide an algorithm (based on the simplex criterion) to test and build complete parameterizations for arbitrary discrete systems, including conditions ensuring uniqueness and numerical stability of the mapping between conjugate-force averages and probability vectors.
- Scalable computation of the Drazin inverse and friction tensors: devise sparse, iterative, or Krylov-subspace methods (with preconditioning) for large rate matrices and Fokker–Planck operators; establish complexity, error, and robustness relative to correlation-integral estimators.
- Practical estimation from data: develop procedures to infer generators from finite trajectories (with confidence intervals), compute friction tensors under model uncertainty, and quantify how estimator bias/variance affects protocol design.
- Rigorous treatment of degenerate metrics: formalize geodesics and variational principles on the non-Riemannian global manifold (including gauge choices for the energy zero-point), and prove conditions under which inherited submanifold metrics are well-posed.
- Protocol synthesis using mode projections: translate the spectral excess-power decomposition into constructive heuristics (e.g., aligning control velocities with slow modes subject to constraints), and benchmark these against full geodesic solutions.
- Curvature-based insight and path planning: compute sectional/ Ricci curvature and geodesic structure of inherited metrics in representative systems; identify geometric features (e.g., bottlenecks, conjugate points) that predict dissipation hotspots and inform protocol routing.
- Incorporate feedback and closed-loop control: extend the manifold structure to state-dependent control laws, account for measurement-induced costs, and determine how information constraints modify friction tensors and optimal paths.
- Address non-Markovian environments: generalize the operator/Drazin framework to memory kernels and colored noise, and identify analogues of the friction tensor and excess-work decompositions under nonlocal-in-time dynamics.
- Multi-bath and temperature-varying protocols: allow β(t) and heterogeneous reservoirs; derive how friction tensors and geodesics transform when thermodynamic parameters of the bath are controlled alongside the energy landscape.
- Quantum extensions: adapt the global manifold and Drazin-based decompositions to Lindblad generators (including non-equilibrium steady states), and determine the quantum counterparts of inherited metrics and spectral excess-power decompositions.
- Sensitivity and robustness analysis: quantify how small perturbations in the generator, control mapping, or equilibrium distribution affect friction tensors and optimal protocols; develop bounds and stability criteria for safe deployment.
- Positivity and singular directions in inherited metrics: characterize when the pushforward/immersion yields a positive-definite metric; detect and handle singular control directions (e.g., parameter redundancies or poorly identifiable forces).
- Boundary conditions and topology in continuous spaces: analyze how reflecting/absorbing boundaries and domain topology affect the Drazin inverse, friction tensors, and geodesic existence/uniqueness; provide implementation guidelines for PDE discretizations.
- Strengthen links to optimal transport and information geometry: prove or refute equivalences between thermodynamic length and Wasserstein distances beyond 1D overdamped settings; clarify relationships to Fisher information and KL divergence on submanifolds.
- Spectral bounds and coarse-grained optimization: derive general upper/lower bounds on excess work in terms of the slowest relaxation modes; propose reduced-order models that retain dominant spectral contributions for efficient protocol design.
- Rare-event regimes and multi-well landscapes: develop quasi-stationary or metastability-aware friction tensors that capture inter-well dynamics and validate whether geodesic protocols remain meaningful under strong timescale separation.
- Guidance on inverse choice and numerics: compare Drazin vs Moore–Penrose pseudo-inverses for non-normal generators; specify when each is appropriate, how to implement them for differential operators, and how discretization affects accuracy.
- Constraints and feasibility in real protocols: integrate amplitude/velocity bounds and path constraints into the geodesic framework; study how such constraints alter optimality conditions and practical protocol scheduling.
- Broaden empirical validation: test the framework on high-dimensional, experimentally relevant systems (e.g., biomolecular manipulation), including measuring generators/friction tensors and demonstrating dissipation reduction via multi-parameter control.
Practical Applications
Immediate Applications
Below are practical use cases that can be deployed now (given access to a Markov model or discretized Fokker–Planck operator and equilibrium statistics), enabled by the paper’s operator and spectral decompositions of the generalized friction tensor and the submanifold construction for partial control.
- Design of low-dissipation experimental protocols in single-molecule manipulation
- Sectors: healthcare/biotech, materials science, academia
- What: Use zeta = -β WD diag(π) and inherited metrics on submanifolds to compute minimum-work (geodesic) protocols for optical-tweezer/AFM pulling, DNA hairpin folding/unfolding, ligand unbinding, and rotary motor assays.
- Tools/Workflow:
- Input an experimentally calibrated Markov model (rate matrix W) or a discretized Fokker–Planck operator with π.
- Compute the Drazin inverse WD (via (W − Π)−1 + Π) and the friction tensor ζ; pull back to experimental control parameters via the Jacobian/pushforward.
- Integrate the geodesic ODE for the control schedule; validate via non-equilibrium simulations/experiments.
- Assumptions/Dependencies: detailed balance (reversible dynamics), near-equilibrium (slow driving, LR regime), conservative control, ergodicity, reliable estimation of W and π from data.
- Friction-aware alchemical and enhanced-sampling schedule design
- Sectors: pharmaceuticals, computational chemistry, software tools
- What: Optimize λ-schedules (and multi-parameter alchemical paths) to minimize dissipation and variance in free-energy calculations using the friction metric; leverage equivalence with thermodynamic length/Wasserstein distance for path quality.
- Tools/Workflow:
- Estimate equilibrium Fisher information and correlation times at discrete λ via short equilibrium runs.
- Assemble ζ(λ) using the Drazin-based or correlation-based approach; compute geodesic paths in λ-space.
- Deploy in established packages (GROMACS, OpenMM, Yank) as a “friction-aware scheduler.”
- Assumptions/Dependencies: accurate equilibrium sampling at control grid points; conservative parametrization; LR validity along the path; sufficiently smooth generator spectrum.
- Dissipation-minimizing control for synthetic and biomolecular machines
- Sectors: biotech, nanotechnology, academia
- What: Reduce work/heat in cyclic or driven operations (e.g., F1-ATPase torque control, synthetic DNA devices) by aligning control velocities with fast modes and avoiding excitation of slow modes (using the spectral decomposition of ζ).
- Tools/Workflow:
- Extract dominant relaxation modes via eigendecomposition of W (or adjoint operator).
- Shape multi-parameter control to minimize projections onto slow eigenmodes (power decomposition).
- Implement as experiment design heuristics for multi-handle or multi-field drives.
- Assumptions/Dependencies: mode structure identifiable and stable; control knobs map to energy modulations (conservative); slow-driving feasible within experimental cadence.
- Low-hysteresis schedules for magnetic, soft-matter, and phase-transition experiments near equilibrium
- Sectors: materials, spintronics, academia
- What: Compute geodesic ramps in magnetic field/temperature/pressure to reduce irreversible losses in quasi-static cycles; apply to Ising-like or coarse-grained models with partial control.
- Tools/Workflow:
- Build Markov (or coarse Fokker–Planck) model near operating conditions.
- Compute inherited friction on the chosen control manifold; integrate geodesics for ramp schedules.
- Apply to hysteresis reduction, calibration routines, and educational demos.
- Assumptions/Dependencies: reversible, near-equilibrium regime; absence of strong critical slowing down or appropriate time allocation to avoid exciting critical modes.
- “Protocol compiler” for Markov models
- Sectors: software, academia/teaching, R&D
- What: A lightweight tool/library that takes a rate matrix and control parametrization and returns minimum-work protocols, dissipation budgets, and mode-resolved power diagnostics.
- Tools/Workflow:
- Provide APIs to compute WD, ζ(V), inherited ζ(u), Christoffel symbols, and geodesics.
- Support discrete and discretized continuous systems; include spectral analysis and sensitivity reports.
- Integrate with Python/Julia ecosystems (NumPy/SciPy/JAX), MSM tools, and Fokker–Planck discretizers.
- Assumptions/Dependencies: users supply calibrated W/π and differentiable control maps; LR regime.
- Curriculum and visualization modules for nonequilibrium thermodynamics
- Sectors: education
- What: Interactive demonstrations of thermodynamic manifolds, geodesics, and eigenmode-projected power; connects geometry to stochastic dynamics.
- Tools/Workflow:
- Prepackaged examples (barrier crossing, 2–3 state systems, Ising chains).
- Visualizers for ζ, geodesic trajectories, and spectral power decomposition.
- Assumptions/Dependencies: small to moderate models; discretized operators for continuous cases.
Long-Term Applications
These applications likely require additional research and development, scaling to larger systems, extension beyond assumptions (e.g., beyond detailed balance), or tighter integration with real-time control and heterogeneous platforms.
- Real-time, low-dissipation feedback control for nanoscale and cellular systems
- Sectors: biotech, bioengineering, diagnostics
- What: Online estimation of slow modes and friction to adapt drive schedules in situ (e.g., steering molecular assembly, gene expression states) while minimizing energetic costs.
- Potential tools/products: closed-loop controllers with embedded friction estimators; lab automation that adapts ramps based on dissipation readings.
- Assumptions/Dependencies: fast identification of W and π from streaming data; near-equilibrium operation; measurement noise robustness; partial observability handled (e.g., via reduced-order models).
- Energy-efficient scheduling in industrial soft-matter and separation processes
- Sectors: energy, chemicals, water treatment
- What: Dissipation-aware ramps for membrane separations, adsorption/desorption cycles, polymer processing, battery formation; minimize energy use for targeted throughput at quasi-static rates.
- Potential tools/products: process simulators with friction-metric modules; optimization suites that constrain dissipation via thermodynamic length budgets.
- Assumptions/Dependencies: validated coarse-grained stochastic models with detailed balance approximations; controllable conservative parameters; process time scales compatible with quasi-static approximations.
- Thermodynamic-geometry–guided training schedules in machine learning and sampling
- Sectors: software/AI, computational statistics
- What: Use friction/thermodynamic length to shape annealing schedules in AIS/SA/VI, tempering ladders, or diffusion-model noise schedules to reduce KL/dissipation and variance.
- Potential tools/products: “geometry-aware” schedulers embedded in probabilistic programming and MCMC frameworks; mode-avoidance heuristics mirroring spectral decomposition insights.
- Assumptions/Dependencies: mapping to reversible, conservative surrogate dynamics; estimation of Fisher information and correlation times from model trajectories; scalability to high dimensions.
- Design of low-dissipation protocols in quantum and open quantum systems
- Sectors: quantum computing/annealing, quantum sensing
- What: Extend global-manifold/inherited-metric and Drazin-based techniques to quantum generators/Lindbladians; optimize adiabatic schedules under decoherence and detailed-balance-like conditions.
- Potential tools/products: schedule compilers for quantum annealers; lab tools for open quantum control targeting minimal entropy production.
- Assumptions/Dependencies: appropriate quantum analogues (e.g., quantum friction metric), partial detailed balance or KMS conditions; accurate spectral data for Lindbladians; near-adiabatic regime.
- Controlled self-assembly and active-matter steering with minimal dissipation
- Sectors: advanced manufacturing, materials, nanorobotics
- What: External-field or boundary-control schedules that guide particle distributions along geodesics on inherited manifolds, avoiding excitation of slow collective modes.
- Potential tools/products: field-programming toolkits that decompose control into mode-targeted components; planners that balance throughput vs dissipation cost.
- Assumptions/Dependencies: reliable coarse-grained reversible models; real-time field actuation; LR validity for collective dynamics.
- Biomedical protocols (e.g., cryopreservation/thawing, drug delivery) tuned for minimal nonequilibrium damage
- Sectors: healthcare, biotech
- What: Time-profiles of temperature/osmolytes/concentration that minimize dissipative stress during transitions (modeled as conservative control over effective energy landscapes).
- Potential tools/products: clinical guidance for ramp rates and multi-parameter coordination informed by friction geodesics; simulation-backed validation frameworks.
- Assumptions/Dependencies: biophysical models admitting near-equilibrium, reversible approximations; validated mapping from controls to effective potentials; safety and regulatory constraints.
- Standards and policy guidance for energy-aware experimental design
- Sectors: research policy, sustainability
- What: Best-practice guidelines that benchmark and reduce dissipative overhead in large-scale experimental platforms (e.g., synchrotrons, cryo-EM sample prep, continuous assays).
- Potential tools/products: reporting standards for “dissipation budgets” and thermodynamic length; funding criteria encouraging dissipation-minimizing methods.
- Assumptions/Dependencies: community consensus on models/metrics; practical measurement protocols for dissipation near equilibrium; alignment with throughput constraints.
Cross-cutting assumptions and dependencies
- Reversibility/detailed balance: Core derivations require generators that satisfy detailed balance; non-conservative driving or sustained non-equilibrium steady states need extensions.
- Linear-response/slow driving: The geodesic/metric formalism is valid near equilibrium; far-from-equilibrium protocols may deviate significantly.
- Model fidelity: Accurate W (or Fokker–Planck operator), equilibrium π, and control-to-energy mappings are prerequisites; parameter estimation and uncertainty quantification are essential.
- Spectral properties: Discrete, well-separated spectra simplify mode-based control; critical points and continuous spectra demand care.
- Control authority: Applications rely on the ability to modulate the potential-energy landscape (or a well-characterized subset) with sufficient temporal precision.
- Computation: For large state spaces, scalable solvers for Drazin inverses, eigensystems, and geodesic ODEs are required; reduced-order modeling may be necessary.
Glossary
Drazin inverse: A generalized inverse for linear operators, particularly useful in handling irreducible rate matrices. "The Drazin inverse of the rate matrix has also appeared in previous works on optimal control~\cite{crooksDrazinInverseRate2018, mandalAnalysisSlowTransitions2016, scandiThermodynamicLengthOpen2019,millerWorkFluctuationsSlow2019, zhongLinearResponseEquivalence2024} and has applications in first-passage problems~\cite{yaoFirstpassagetimeMomentsMarkov1985, coolen-schrijnerDeviationMatrixContinuoustime2002}."
Eigenfunctions: Functions that determine the principal modes of system relaxation, used in spectral decomposition. "The right eigenfunctions and left eigenfunctions satisfy and ."
Fisher-information matrix: A matrix that provides a measure of the amount of information that a random variable carries about an unknown parameter upon which the probability depends. "And the equilibrium Fisher-information matrix $\mathcal{I} \equiv \beta<sup>2</sup> \Sigma_{\bm{f}<sup>0</sup> \ ."</p> <p><strong>Geodesic</strong>: The shortest path between two points in a curved space, according to the given metric. "The metric on this manifold is a generalized friction tensor that depends only on the instantaneous value of the control parameters."</p> <p><strong>Generator</strong>: An operator responsible for governing the time evolution of probability distributions in a Markov process. "Consider some continuous- or discrete-state Markov process with generator $\mathcal{G}$ satisfying the conditions established in Sec.~\ref{sec:prelims}."</p> <p><strong>Integral relaxation time</strong>: A measure related to how long the system takes to return to equilibrium, contributing to the friction tensor decomposition. "In this section, we show that the properties of the full-control friction tensor permit mathematical manipulations which significantly simplify the calculation of friction tensors."</p> <p><strong>Markov process</strong>: A stochastic process exhibiting the property that future states depend only on the current state, not on the sequence of events that preceded it. "Summation (for discrete state spaces) and integration (for continuous state spaces) are unified by introducing a measure $\mu\Omega."
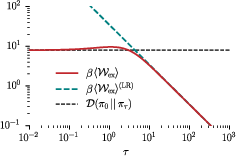
Relaxation mode: The principal mode by which a system returns to equilibrium after perturbation, related to eigenfunctions. "Under the change of variables for total protocol time $\tau, the linear-response excess work is..."
Submanifold: A manifold that is a subset of another manifold, often with inherited properties from the larger manifold. "Interpreted geometrically, the full-control friction tensor is a metric on a manifold that we call the global thermodynamic manifold."
Thermodynamic manifold: A mathematical framework that represents the space over which thermodynamic variables vary; structured by a metric related to thermodynamic properties. "The partial-control manifolds for arbitrary sets of control parameters arise naturally as submanifolds."
Collections
Sign up for free to add this paper to one or more collections.

