- The paper introduces procedural placement models (PPMs) that automatically generate vegetation placement in urban settings by using lot geometry and zoning data.
- It employs deep neural networks to learn plant distribution from satellite imagery, ensuring realistic vegetation patterns in simulated cityscapes.
- The approach demonstrates dynamic growth and adaptive simulation of plants, significantly enhancing the visual fidelity and ecological plausibility of urban models.
Procedural Urban Forestry
Introduction
The paper "Procedural Urban Forestry" (2008.05567) introduces procedural placement models (PPMs) to enhance the realism of vegetation in urban layouts. This approach focuses on generating plausible plant positions based on the structural and functional zones within a city. Traditional methods of urban modeling often overlook the crucial role of vegetation, focusing primarily on architectural elements such as buildings and street layouts. This paper addresses this gap by proposing a framework that utilizes the geometry of city spaces and satellite imagery to inform the placement and growth of vegetation, resulting in more realistic virtual urban environments. PPMs can be applied to either generated urban models or learned directly from real-world data, such as satellite images and land register information.
Procedural Placement Models (PPM)
The core innovation of this study lies in the introduction of PPMs, which serve as a strategy for automatically positioning vegetation within urban landscapes. These models take into account various factors including the geometry of individual lots, positional parameters, and zoning information. The approach involves two main stages: generating plant positions and subsequently simulating their growth using environmental models. This is schematically represented in Figure 1.
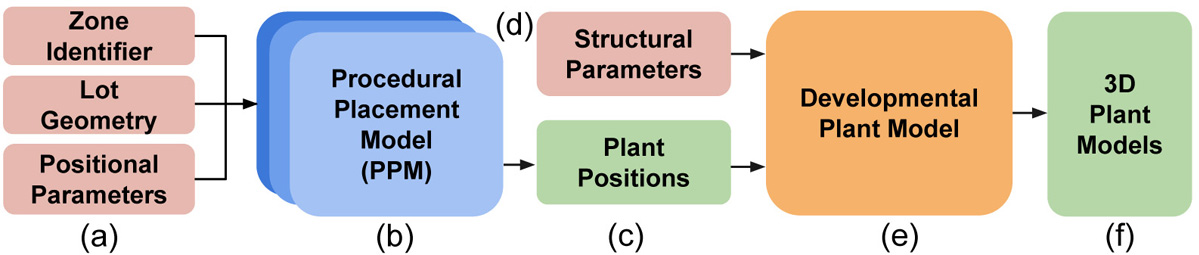
Figure 1: To place vegetation in urban environments we propose procedural placement models (b) that implement placement strategies for vegetation based on the geometry of individual lots, positional parameters, and a zone identifier (a). After plant positions (c) have been generated, we use a developmental model (e) along with structural parameters (d) to jointly grow plants, which results in realistic 3D plant models.
PPMs not only facilitate the placement of vegetation but also allow for its dynamic growth, adapting the model to reflect environmental changes. This adaptability leads to the generation of plant models that respond realistically to their surroundings, augmenting the authenticity of urban simulations.
Learning Plant Placement from Data
A significant portion of the study focuses on leveraging existing urban data to refine the procedural models. By employing satellite images, the authors utilize coverage maps to ascertain the distribution of vegetation within various city zones. This data-driven approach helps in generating plant distributions that closely mimic real-world conditions (Figure 2).

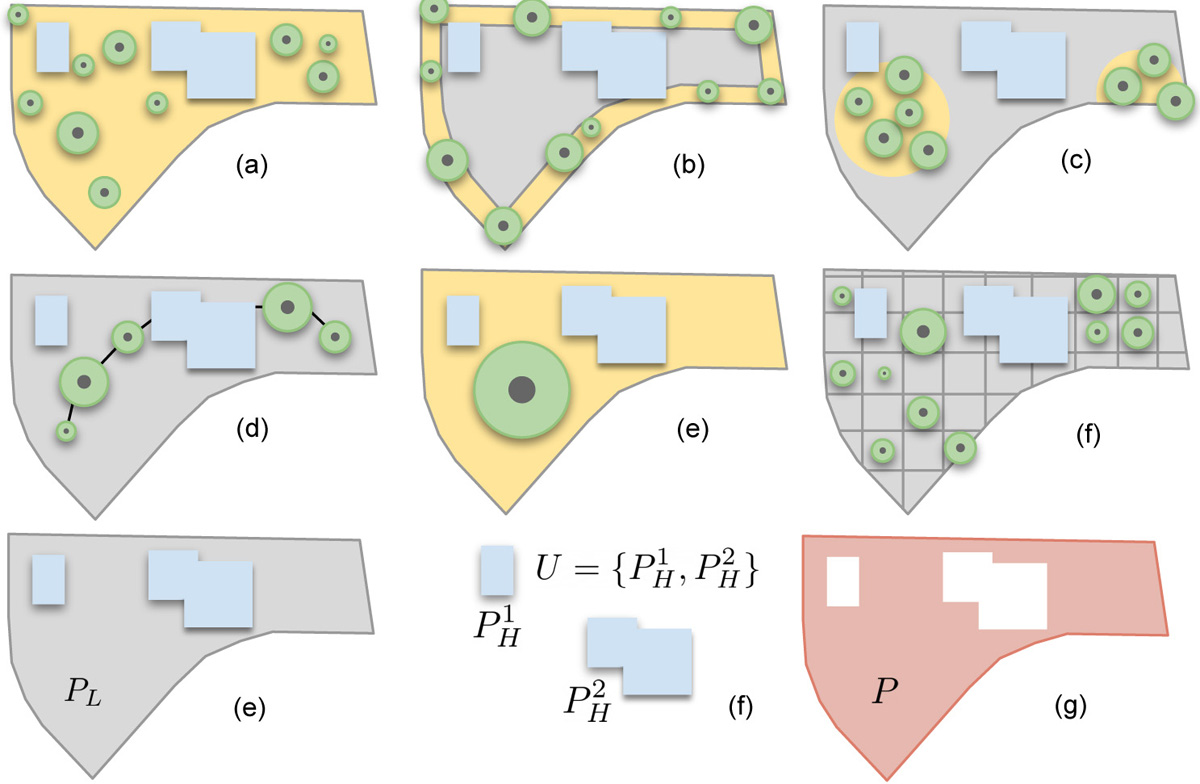
Figure 2: Urban layout: satellite images (left), zone data for individual lots (middle), and coverage maps (right) are available in public datasets. We use zone data and lot geometry as inputs to our procedural models and learn to predict their parameter values from the coverage maps.
The use of deep neural networks enables the learning of plant distribution patterns from these coverage maps, thereby informing the PPMs for more accurate vegetation placement. This process not only leverages the visual data from satellite images but also enriches the procedural models' parameter space, offering a higher degree of customization and adaptability.
Implementation and Results
This research exhibits its effectiveness through various large-scale urban scenarios. By employing PPMs, the authors demonstrate the ability to generate complex tree models dynamically, integrating seamlessly with urban landscapes. The developmental models used allow plants to grow and adapt in real time, maintaining aesthetic and ecological plausibility. For example, Figure 3 illustrates the nuanced adaptations of plant models in varied environmental settings, underscoring the integration of environmental sensitivity in procedural modeling.
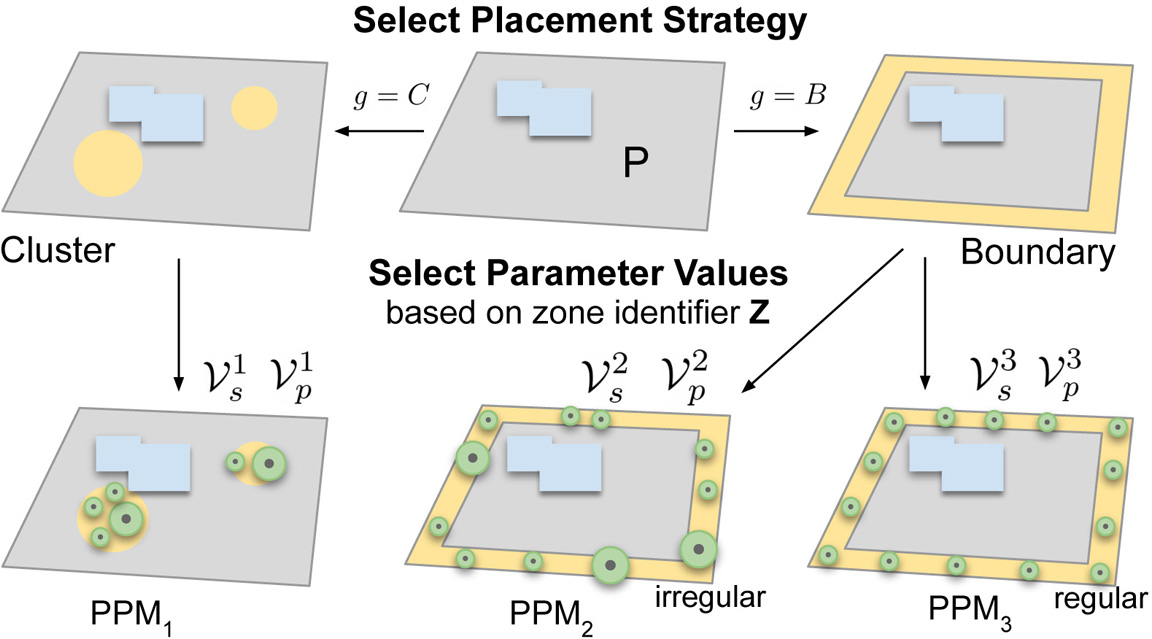
Figure 3: Given a lot, we use a placement strategy to define the placement of vegetation. The zone identifier Z is used to select parameter values for structural Vs and positional parameters Vp. Together, strategies and parameters allow us to generate vegetation with globally similar appearance depending on the municipality zones within a city.
The exploratory studies shown validate that the procedural models are not only operationally robust, but they also significantly enhance the visual fidelity of urban models through the realistic portrayal of vegetation.
Conclusion
This study provides a comprehensive framework for integrating vegetation into urban modeling, thereby filling a critical gap in the simulation of realistic city environments. By combining procedural generation techniques with environmental modeling and machine learning, the authors effectively demonstrate that significant gains in visual realism and functional modeling can be achieved. As urban modeling continues to evolve, the methods and ideas proposed here will likely serve as a foundation for future research, offering insights into the complex interplay between natural and built environments. Future developments may explore further enhancements in modeling other ecological parameters and integrating finer-scale vegetation dynamics into broader urban planning frameworks.