- The paper presents SwarmLab, a Matlab-based simulator that integrates OOP principles and decentralized swarm algorithms for robust modeling of drone swarm dynamics.
- The methodology employs a modular structure with detailed drone state vectors and a flexible GUI for real-time parameter adjustments and rapid prototyping.
- Key performance metrics, including order, safety, and connectivity, demonstrate the simulator’s efficiency in managing up to 1024 drones in various simulation scenarios.
SwarmLab: A Detailed Examination
Introduction
The paper "SwarmLab: a Matlab Drone Swarm Simulator" presents SwarmLab, a comprehensive simulation tool specifically designed for modeling and analyzing drone swarms. The simulator is developed entirely in Matlab, offering a streamlined approach for testing and prototyping aerial swarm algorithms. This solves the limitations of existing simulators, which often demand interfacing with multiple programming languages, lack robust swarm-centric functionalities, or do not support extensive performance metrics.
Software Architecture
SwarmLab's architecture is built using Object Oriented Programming (OOP) principles in Matlab, allowing for an efficient and flexible coding environment. The main components include parameter scripts, the Drone and Swarm classes, graphical interfaces for visualization, and a set of example scripts. This modular structure supports both quadcopter and fixed-wing drones, represented by comprehensive state vectors encompassing position, velocity, Euler angles, and angular velocities. The use of Matlab facilitates rapid prototyping and testing due to its extensive built-in functionality for visualization and data analysis.
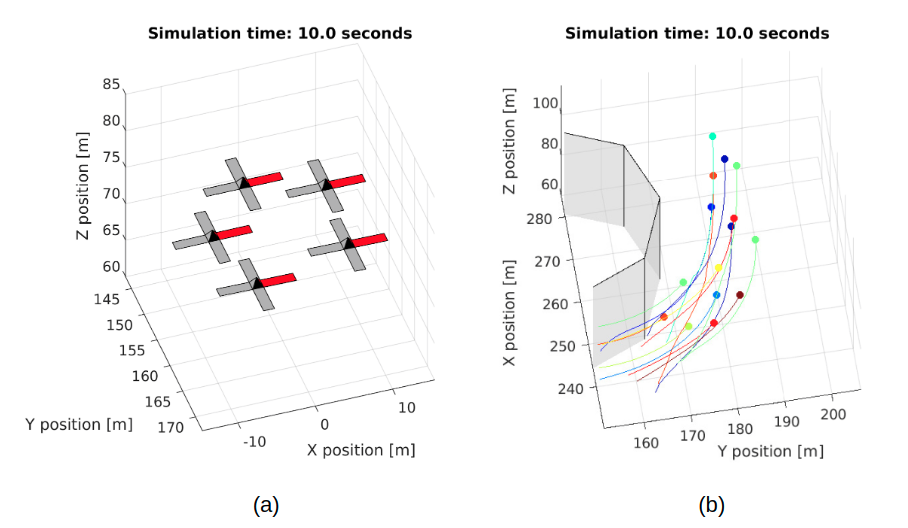
Figure 1: A 3D visualization in SwarmLab showing coordinated flight and obstacle avoidance.
The Swarm class is central, enabling the instantiation and control of drone swarms. Users initiate simulations through scripts or a Graphical User Interface (GUI), which provides real-time parameter adjustments. Control commands at each iteration consider drone positions, velocities, and interactions with neighbors. Swarm algorithms are fundamental, and SwarmLab supports the implementation of new algorithms for user experimentation.
Swarm Algorithms
SwarmLab offers the implementation of two standout decentralized swarm algorithms—Olfati-Saber's and Vasarhelyi's. Both algorithms stem from principles of potential fields and graph theory and prioritize aspects such as inter-agent collision avoidance and maintaining smooth trajectories. The simulator supports diverse neighbor selection strategies, including euclidean and topological distances, allowing agents to compute their control commands based only on local information.
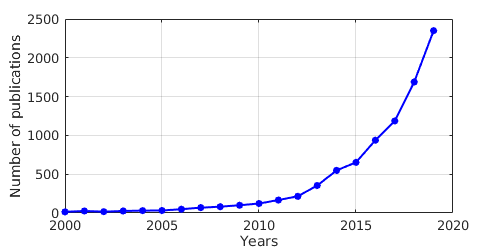
Figure 2: A statistical graph depicting trends in publications on aerial swarms over two decades.
Olfati-Saber's algorithm constructs a collective potential penalizing deviations from a preset lattice, while Vasarhelyi's incorporates additional friction forces to enhance trajectory smoothness around obstacles. These algorithms demonstrate varying trade-offs between speed maintenance and trajectory smoothness, vital for specific applications such as cooperative drone missions in cluttered environments.
SwarmLab excels in delivering an array of performance metrics crucial for evaluating swarm behavior: order metric, safety metrics for inter-agent collisions, union, and connectivity metrics. These provide quantitative insights into swarm functionality and reliability, crucial for real-world application and algorithm development.
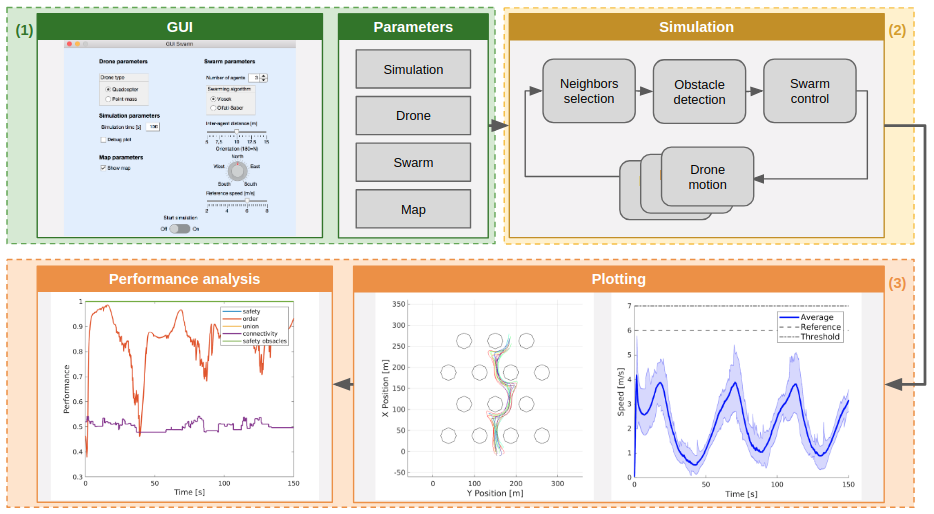
Figure 3: Maps with varying obstacle densities illustrate how swarms adapt their navigation strategies.
The simulator efficiently distinguishes between real-time and offline plotting tools, enabling performance-related debugging and visualization. This is pivotal for users aiming to optimize algorithms to perform under real-world conditions.
Computational Efficiency
The paper examines SwarmLab's computational performance across different swarm sizes and models. Notably, the simulator can handle up to 1024 drones, balancing between high-fidelity simulations with full quadcopter dynamics and less computationally intensive point-mass models. The real-time factor analysis showcases SwarmLab's capability to simulate dense drone swarms with reasonable computational demands, making it suitable for both research and educational purposes.
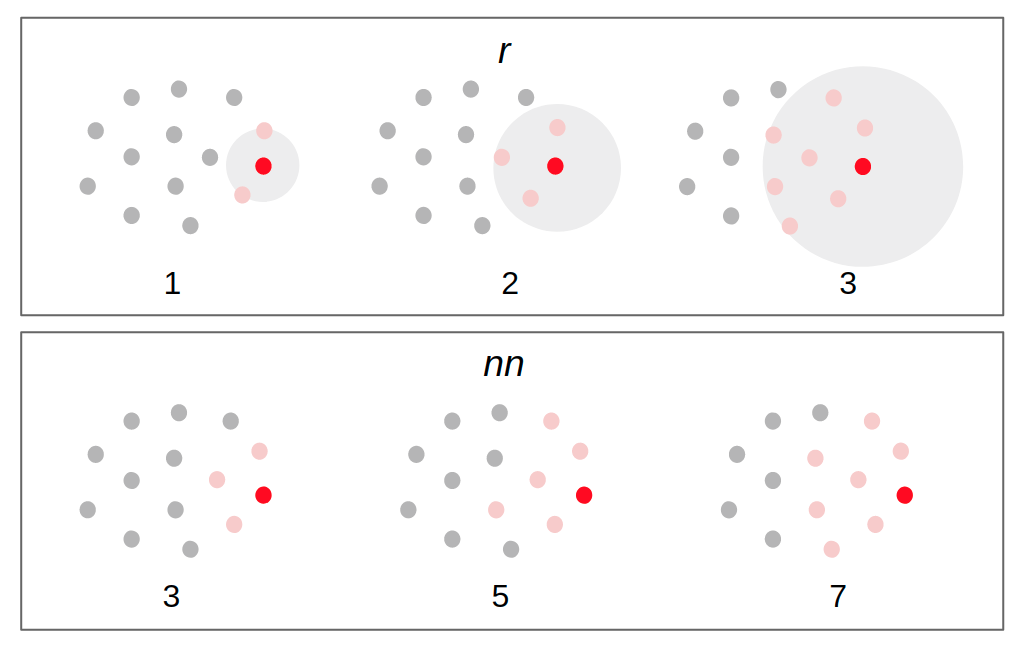
Figure 4: Real-time factors for varying swarm sizes, displaying SwarmLab's efficiency across different configurations.
Conclusion
SwarmLab provides an invaluable resource for researchers and educators in drone swarm technology. Its fully Matlab-based framework simplifies the process of developing, testing, and analyzing swarm algorithms. Future enhancements, including the incorporation of C/C++ code-generation for improved computational efficiency and the integration of noise and delay models, are promising directions. These improvements will better align the simulator with real-world swarming scenarios, further solidifying its utility in advancing drone swarm research and applications.